抗野值強(qiáng)跟蹤Kalman 濾波在風(fēng)場估計(jì)中的應(yīng)用*
2015-03-30 05:54:02趙現(xiàn)斌
傳感器與微系統(tǒng) 2015年7期
關(guān)鍵詞:數(shù)據(jù)處理風(fēng)速
李 陽,孔 毅,趙現(xiàn)斌
(1.解放軍理工大學(xué) 氣象海洋學(xué)院,江蘇 南京211101;2.中國人民解放軍94994 部隊(duì),江蘇 南京210017)
0 引 言
隨著氣象無人機(jī)技術(shù)的發(fā)展,利用無人機(jī)搭載皮托靜壓管進(jìn)行空中風(fēng)[1]探測日益引起國內(nèi)外關(guān)注。皮托靜壓管測風(fēng)是把無人機(jī)作為探測平臺(tái)[2],搭載機(jī)載氣象傳感器和數(shù)據(jù)采集裝置進(jìn)行風(fēng)速測量。這種大區(qū)域、長時(shí)間、連續(xù)風(fēng)場探測方法在航天器發(fā)射與返回、重要武器試驗(yàn)、戰(zhàn)場氣象測量、惡劣天氣監(jiān)測、龍卷風(fēng)近距環(huán)境探測監(jiān)視等應(yīng)用中具有獨(dú)特的作用和優(yōu)勢(shì)。
在高空風(fēng)場探測過程中,由于受傳感器工作狀態(tài)、環(huán)境雜波等因素的影響,量測數(shù)據(jù)中經(jīng)常存在一些異常值。因此,風(fēng)場數(shù)據(jù)處理方法是無人機(jī)測風(fēng)的一項(xiàng)重要內(nèi)容,對(duì)提高測風(fēng)精度具有重要意義。當(dāng)前常使用Kalman濾波算法對(duì)風(fēng)場數(shù)據(jù)進(jìn)行處理,但其過于依賴系統(tǒng)噪聲和量測噪聲的統(tǒng)計(jì)特性,且缺乏對(duì)測量數(shù)據(jù)過失誤差的抗擾性和對(duì)傳感器突發(fā)性故障的容錯(cuò)能力[3],降低了濾波精度和抗野值能力,容易造成系統(tǒng)的不穩(wěn)定。
本文針對(duì)氣象無人機(jī)的測風(fēng)特點(diǎn)和Kalman 濾波在數(shù)據(jù)處理中的局限性,將強(qiáng)跟蹤Kalman 濾波和抗野值算法應(yīng)用于無人機(jī)探測數(shù)據(jù)處理中,達(dá)到抑制濾波發(fā)散,提高濾波精度的目的。
1 濾波算法
1.1 Kalman 濾波算法
Kalman 濾波是典型的最小方差(MMSE)估計(jì)方法,采用 遞歸技術(shù),利用k-1時(shí)刻狀態(tài)值給出k的預(yù)測值,并保證該均方誤差最小。建立離散系統(tǒng)模型
狀態(tài)方程

量測方程

上述模型中,Xk為狀態(tài)向量,Zk為觀測向量,φk|k-1為k-1 時(shí)刻到k 時(shí)刻的狀態(tài)轉(zhuǎn)移矩陣,Hk為量測矩陣,Wk-1和Vk分別是均值為零,方差為Qk-1和Rk且相互獨(dú)立的過程噪聲和量測噪聲。由于Kalman 濾波是一個(gè)帶回饋的估計(jì)方法,可將其分為時(shí)間更新和量測更新兩個(gè)階段。
時(shí)間更新方程:
狀態(tài)一步預(yù)測

一步驗(yàn)前誤差方差陣

量測更新方程:
增益陣

濾波方程

驗(yàn)后誤差方差陣

新息序列

上述方程未提供相關(guān)噪聲的估計(jì)模型,且無人機(jī)測風(fēng)受噪聲影響較大,因此,需對(duì)系統(tǒng)噪聲和量測噪聲進(jìn)行分析。由于系統(tǒng)干擾存在穩(wěn)定性,可設(shè)系統(tǒng)噪聲方差Q 為定值;量測噪聲受周圍環(huán)境的影響較為明顯,需對(duì)量測噪聲方差R 在線估計(jì)。利用Sage-Husa 自適應(yīng)濾波[4],得到量測噪聲方差

1.2 改進(jìn)的強(qiáng)跟蹤Kalman 濾波算法
強(qiáng)跟蹤Kalman 濾波[5]是在Kalman 濾波理論的基礎(chǔ)上提出的,為保證濾波器的可靠收斂,在一步驗(yàn)前誤差方差陣中引入可在線計(jì)算的時(shí)變漸消矩陣[6]。該方法在風(fēng)場突變時(shí)具有很強(qiáng)的跟蹤能力,同時(shí)對(duì)噪聲統(tǒng)計(jì)特性的敏感性也較低。因此,將式(4)修改為

其中
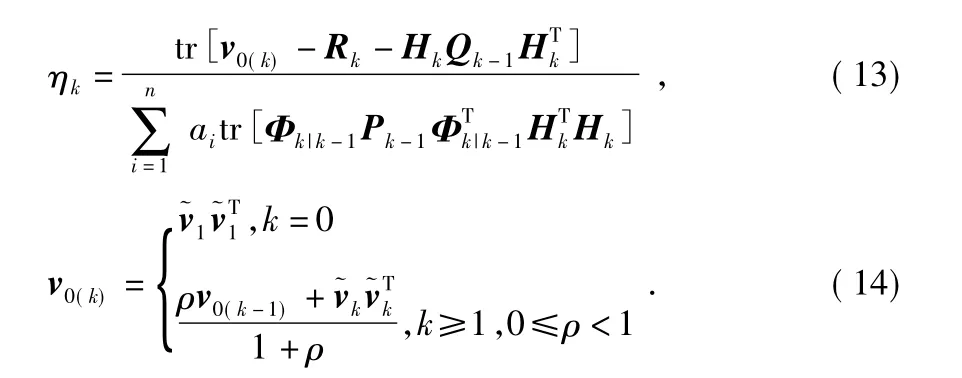
應(yīng)用統(tǒng)計(jì)方法,可用算術(shù)平均值將v0(k)近似表示
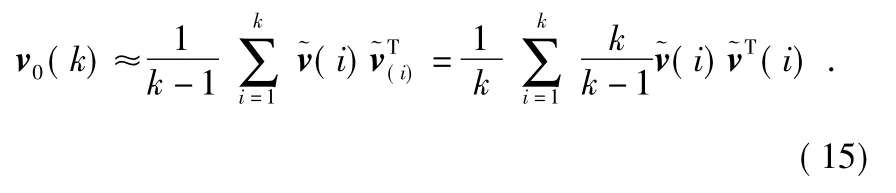
式中 各項(xiàng)加權(quán)系數(shù)均為1/k,但風(fēng)場估計(jì)中應(yīng)該強(qiáng)調(diào)新進(jìn)信息的作用,因此,可以改變因子,使和式中的各項(xiàng)乘以不同的加權(quán)系數(shù)。應(yīng)用指數(shù)加權(quán)方法,新建加權(quán)系數(shù)μi,并使其滿足

由等比數(shù)列求和公式可推導(dǎo)出

其中,a 為遺忘因子,式(15)中的和式各項(xiàng)乘以加權(quán)系數(shù)μk-i,代替原來的1/k,得到v0(k)近似估計(jì)算法

1.3 抗野值修正算法
帶有野值的數(shù)據(jù)樣本往往會(huì)使Kalman 濾波器對(duì)系統(tǒng)的狀態(tài)預(yù)報(bào)修正錯(cuò)誤,使濾波結(jié)果發(fā)生偏移,以往常采用3δ 準(zhǔn)則進(jìn)行野值判別,但其判別尺度把握不靈活且修正值的準(zhǔn)確度不高。為了提高抗野值能力,保證濾波精度,文獻(xiàn)[7]提出了一種利用新息序列加權(quán)的方法來消除野值影響的方法。當(dāng)量測數(shù)據(jù)不包含野值時(shí),濾波器能夠有效利用新息,同時(shí)對(duì)量測噪聲進(jìn)行在線估計(jì);當(dāng)量測數(shù)據(jù)中存在野值時(shí),能克服其不利影響,盡可能還原系統(tǒng)真實(shí)狀態(tài)。抗野值算法如下

其中

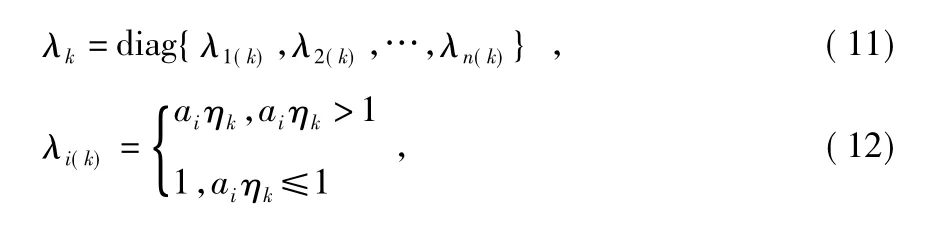
式(18)為壓縮影響函數(shù);式(19)為權(quán)矩陣;式(20)為選取的門限常數(shù)序列。此外,λk為矩陣的最大特征值,為以χ2(m)分布置信度為(1-α) ×100%的上分位點(diǎn),通常情況下α 取0.05 或0.025,m 為量測數(shù)據(jù)Zk的維數(shù)。上述模型抗野值原理是通過引入壓縮影響函數(shù),改變野值的影響權(quán)重,抑制野值帶來的異常新息,達(dá)到抗野值的目的。
2 抗野值自適應(yīng)濾波算法
自然風(fēng)大致可分解為定常風(fēng)、紊流、風(fēng)切變和突風(fēng)四個(gè)分量[8]。通常情況下,在風(fēng)場探測系統(tǒng)中,將風(fēng)速表示成定常風(fēng)和紊流之和,并在此基礎(chǔ)上疊加量測噪聲,一旦量測值中出現(xiàn)野值或?yàn)V波發(fā)散時(shí),誤差協(xié)方差陣都將無界,此時(shí)實(shí)際的新息往往比理論預(yù)計(jì)的大很多倍。實(shí)際的新息用vk表示,理論預(yù)計(jì)誤差的新息用新息序列協(xié)方差陣E[vk來描述,。因此,野值是否存在或?yàn)V波是否發(fā)散的依據(jù)為

式中 κ 為判別因子,其大小往往取3 或4。當(dāng)其成立時(shí),量測值Zk為正常量測值,直接采用引入Sage-Husa 的Kalman 濾波進(jìn)行最優(yōu)估計(jì);反之,說明量測值Zk為野值或?yàn)V波發(fā)散。設(shè)置連續(xù)野值門限值,當(dāng)連續(xù)的野值數(shù)多于該門限值或?yàn)V波發(fā)散時(shí)采用改進(jìn)的強(qiáng)跟蹤Kalman 濾波算法;當(dāng)存在少數(shù)野值時(shí)采用抗野值修正算法。抗野值強(qiáng)跟蹤Kalman 濾波算法流程如圖1。
3 測風(fēng)實(shí)驗(yàn)與結(jié)果分析
3.1 風(fēng)場模型建立
飛行仿真中,定常風(fēng)用低頻風(fēng)模型[9]描述,紊流場由基于空間相關(guān)函數(shù)的方法[10]建立,風(fēng)切邊、突風(fēng)等在內(nèi)的大氣擾動(dòng)分量直接疊加到量測噪聲上,本文不予單獨(dú)考慮,建立風(fēng)場模型
式中 VD,VW,y 分別為定常風(fēng)速、紊流風(fēng)速和量測風(fēng)速;a為紊流場衰減系數(shù);vD,vW,vO為互不相關(guān)的零均值高斯白噪聲,方差分別為QD,QW,RO。a 和QW由采樣步長h、紊流尺度L 和紊流強(qiáng)度σ 決定

3.2 模擬數(shù)據(jù)處理
在模擬風(fēng)場中,加入服從高斯分布的量測噪聲,設(shè)置濾波各參數(shù)初值如下

由于風(fēng)是一種大范圍分布的空氣運(yùn)動(dòng),受周圍環(huán)境和測量儀器的影響導(dǎo)致數(shù)據(jù)中摻雜野值,因此,仿真中在多處加入孤立野值和連續(xù)野值。分別使用Kalman 濾波算法和本文提出的抗野值強(qiáng)跟蹤Kalman 濾波算法進(jìn)行濾波處理,圖2 是不同濾波算法的風(fēng)速估計(jì)比較圖。
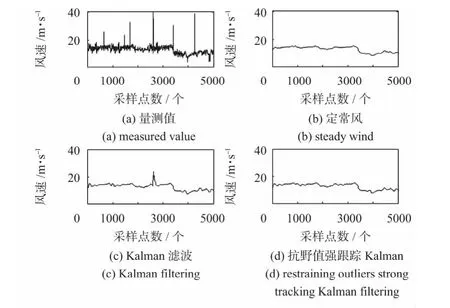
圖2 仿真模型風(fēng)速估計(jì)對(duì)比圖Fig 2 Comparison of wind speed estimation in simulation model
由圖2 可以看出:Kalman 濾波具有一定的風(fēng)場跟蹤能力,但并未取得理想的濾波效果,受成片野值影響,結(jié)果出現(xiàn)大幅度跳變,濾波出現(xiàn)發(fā)散;而抗野值強(qiáng)跟蹤Kalman 濾波在保證濾波精度的同時(shí),能夠有效抑制孤立野值或連續(xù)的影響,且精度較高,具有良好的魯棒性。因此,抗野值強(qiáng)跟蹤Kalman 濾波算法無論在濾波的精度還是收斂性方面均遠(yuǎn)優(yōu)于Kalman 濾波,適合工程應(yīng)用。
3.3 實(shí)測數(shù)據(jù)處理
以某型氣象無人機(jī)2008 年4 月17 日飛行探測數(shù)據(jù)為例,將本文方法用于實(shí)測數(shù)據(jù)處理中,如圖3 所示。圖中可以看到無人機(jī)初期和末期處于爬升和下降階段,受氣流擾動(dòng)較為嚴(yán)重,風(fēng)速值出現(xiàn)一定幅度的波動(dòng),甚至出現(xiàn)野值,兩種數(shù)據(jù)處理方法都具有一定的跟蹤能力,但Kalman 規(guī)避連續(xù)野值的效果不佳,且濾波精度不高,而抗野值強(qiáng)跟蹤Kalman 濾波成功處理了連續(xù)野值,表現(xiàn)出較好的抗野值能力。圖4 是圖3 的局部放大圖。由圖4(a)可知,抗野值強(qiáng)跟蹤Kalman 濾波算法較Kalman 濾波算法具有更好的風(fēng)場跟蹤能力;由圖4(b)可知,抗野值強(qiáng)跟蹤Kalman 濾波算法具有更優(yōu)秀的抗野值能力。
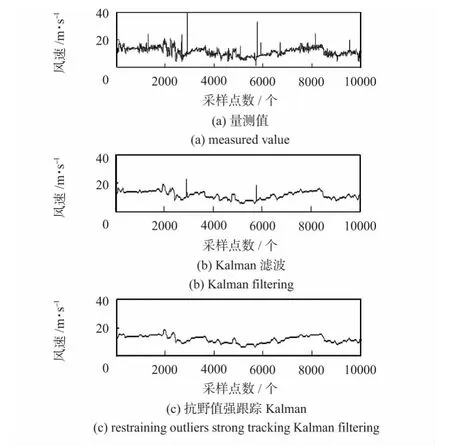
圖3 風(fēng)速估計(jì)對(duì)比圖Fig 3 Comparison of wind speed estimation

圖4 風(fēng)速估計(jì)局部對(duì)比圖Fig 4 Local comparison of wind speed estimation
4 結(jié) 論
濾波的精度和穩(wěn)定性是無人機(jī)測風(fēng)數(shù)據(jù)處理的關(guān)鍵,常用的Kalman 濾波算法的跟蹤能力和抗野值能力欠佳。因此,本文結(jié)合Sage-Husa 濾波算法、強(qiáng)跟蹤濾波算法、抗野值修正算法的特點(diǎn),根據(jù)實(shí)際新息和理論預(yù)計(jì)的判別關(guān)系,自適應(yīng)選擇濾波算法。最后利用仿真和實(shí)測風(fēng)場數(shù)據(jù)證明了該方法不僅克服了孤立野值和成片野值對(duì)濾波帶來的不利影響,同時(shí)也保證了濾波精度,具有較強(qiáng)的魯棒性,可作為無人機(jī)測風(fēng)系統(tǒng)有效的數(shù)據(jù)處理方法。
[1] 張曉芳,嚴(yán) 衛(wèi).中高層大氣探測技術(shù)的研究進(jìn)展[J].氣象科學(xué),2007,27(4):457-463.
[2] Kang H,Yang Q,Butler C,et al.Optimization of sensor locations for measurement of flue gas flow in industrial ducts and stacks using neural networks[J].IEEE Transactions on Instrumentation and Measurement,2000,49(2):228-233.
[3] 胡 鋒,孫國基.Kalman 濾波的抗野值修正[J].自動(dòng)化學(xué)報(bào),1999,25(5):692-696.
[4] Efe M,Bather J A,Atherton D P.An adaptive Kalman filter with sequential rescaling of process noise[C]∥American Control Conference,1999:3913-3917.
[5] Ristic B,Arulampalam M S.Tracking a manoeuvring target using angle-only measurements algorithms and performance[J].Signal Processing,2003,83:1223-1238.
[6] 柯 晶,錢積新.基于邏輯轉(zhuǎn)換的改進(jìn)強(qiáng)跟蹤卡爾曼濾波器[J].電子學(xué)報(bào),2002,30(6):925-927.
[7] 高 寧,周躍慶,楊 曄,等.抗野值自適應(yīng)卡爾曼濾波方法的研究[J].中國慣性技術(shù)學(xué)報(bào),2003,11(3):25-28.
[8] 肖亞倫,金長江.大氣擾動(dòng)中的飛行原理[M].北京:國防工業(yè)出版社,1993.
[9] 蔡 崧,產(chǎn)竹旺.基于自適應(yīng)濾波的風(fēng)場測量仿真試驗(yàn)平臺(tái)[J].計(jì)算機(jī)工程,2003,29(18):192-194.
[10]陸宇平,胡亞海.基于空間相關(guān)函數(shù)的二維紊流場數(shù)值生成法[J].南京航空航天大學(xué)學(xué)報(bào),1999,31(2):139-145.
猜你喜歡
心理學(xué)報(bào)(2022年4期)2022-04-12 07:38:02
水泵技術(shù)(2021年3期)2021-08-14 02:09:20
電機(jī)與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(bào)(2020年5期)2021-01-14 09:26:54
西南交通大學(xué)學(xué)報(bào)(2016年4期)2016-06-15 20:29:37
當(dāng)代化工研究(2016年9期)2016-03-20 16:22:13
電測與儀表(2015年8期)2015-04-09 11:50:06
電機(jī)與控制應(yīng)用(2015年7期)2015-03-01 03:50:15
電網(wǎng)與清潔能源(2015年3期)2015-02-28 16:03:31
西華師范大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年3期)2015-02-27 15:31:22