電容式MEMS 加速度傳感器在氣囊系統中的應用
2015-03-30 05:54:04殷蘇民李正陽汪偉力張建明
傳感器與微系統 2015年7期
殷蘇民,李正陽,萬 翔,汪偉力,張建明
(江蘇大學 機械工程學院,江蘇 鎮江212013)
0 引 言
隨著汽車技術的快速發展,汽車安全氣囊已廣泛應用在各類汽車上。安全氣囊系統作為汽車被動安全的核心,其性能要求越來過高,主要通過改進傳感器和升級安全氣囊診斷模塊(supplemental restraint system diagnostic module,SDM)來滿足需求[1]。目前很多汽車生產廠家主要使用集成于控制器中的中央傳感器作為唯一檢測碰撞信號的設計方案,這種設計往往由于碰撞時,信號發生減弱、延時甚至丟失,從而導致控制器不能快速精確地對碰撞做出判斷。
本文使用基于微機電系統(micro-electro-mechanical systems,MEMS)的加速度傳感器對碰撞加速度進行采集,并通過專有集成電路對信號進行處理,利用SPI 總線技術實現與安全氣囊控制器通信[2]。該方案能夠實現實時的單向數據傳輸功能,將外圍加速度傳感器采集到的數據實時傳遞到控制單元,使其能快速準確地對數據進行運算,對碰撞做出正確的判斷。
1 加速度傳感器
1.1 差動電容式加速度傳感器結構
電容式加速度傳感器是利用電容原理,將被測加速度轉換成電容的變化來進行加速度測量[3]。電容式加速度傳感器的特點是靜態電容較大、溫度漂移系數小、線性度高、微結構牢固可靠、靈敏度高。但由于電容小,約1 pF,信號處理電路與傳感器必須集成在同一芯片上,這樣可以直接將調節信號作為輸出信號[4]。
圖1 為差動電容加速度傳感器結構原理圖。加速度傳感器在芯片上虛掛一個可動部分,并通過4 個彎曲梁A 與芯片固定,彎曲梁長200 μm,寬2 μm,它被置于一叉指形狀的單元結構槽內,叉指結構的中間部分即為加速度傳感器的可動部分B。該部分質量小于0.1 μg。在一個完整的外圍加速度傳感器系統中,由42 個這樣的叉指型結構組成,形成了由C1 和C2 組成的差動電容加速度傳感器[5]。
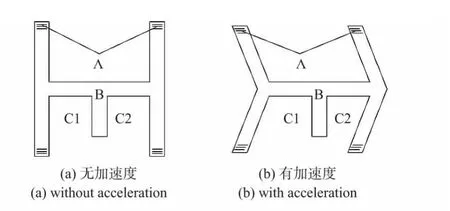
圖1 加速度傳感器原理圖Fig 1 Principle diagram of acceleration sensor
1.2 差動電容式加速度傳感器原理
在發生碰撞時,如圖1,由慣性力使可動極板發生移動Δδ,從而C2的間隙變為δ0-Δδ,C1的間隙變為δ0+Δδ,根據電容差動原理有[5]
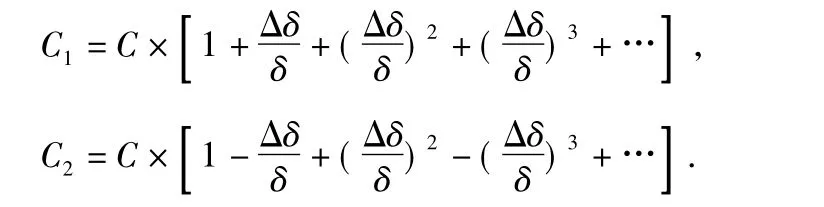
差動工作電容輸出為

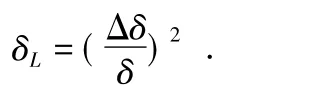
線性度為
靈敏度為
因此,線性度和靈敏度均得到了改善,再通過外圍信號調理電路處理,可以將加速度轉換為電容變化量,并實現線性表示。
1.3 專有集成電路系統
專有集成電路(ASIC)是傳感器與微處理器之間的一個接口電路,功能是將加速度傳感器輸出的模擬信號進行處理并轉換為數字信號后,通過總線傳送到控制器。由于差動電容式加速度傳感器的特性所致,使其必須與ASIC 一起封裝在防水的殼體內,用疊加的方法將彈簧—質量系統放在硅晶片表面。如圖2,ASIC 需要將傳感器輸出的電信號進行放大、濾波以及A/D 轉換并輸送到安全氣囊控制單元進行邏輯運算。ASIC 還包括傳感器偏差的補償電路和啟動時的自診斷[6]。
2 系統設計
2.1 系統概述
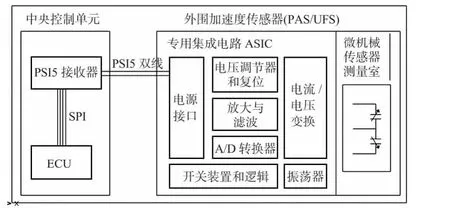
圖2 外圍加速度傳感器系統圖Fig 2 System diagram of peripheral acceleration sensor
本系統設計4 只外圍加速度傳感器,包括2 只前碰加速度傳感器(UFS)、2 只側碰加速度傳感器(PAS)。其中,UFS 主要用來用來增強發生正面碰撞時加速度的檢測,而PAS 主要用來增強發生側面碰撞時加速度的檢測。再加上集成于SDM(安全氣囊診斷模塊)的x/y 軸中央傳感器,總共有6 只傳感器。當這些傳感器接收到信號時,就會將數據傳輸到SDM,ECU 就會根據接收到的數據進行相應的運算,當達到起爆條件時,就會對點火回路中需要點爆的回路發出點火指令,此時相應的氣袋就會被點爆,整個過程僅僅需要100 多毫秒的時間。另外,當發生碰撞后,SDM 模塊的輸出端還會發出碰撞指令,車輛會進行自動熄火、打開門鎖等操作[6]。
2.2 系統結構
外圍加速度傳感器與安全氣囊診斷模塊的安裝如圖3。UFS 分別安裝于前側防碰橫梁與縱梁的兩側交匯處;PAS 分別安裝于汽車兩側B 柱下端;SDM 則安裝于汽車正中央,一般位于變速箱擋桿下方,并與底盤緊固。
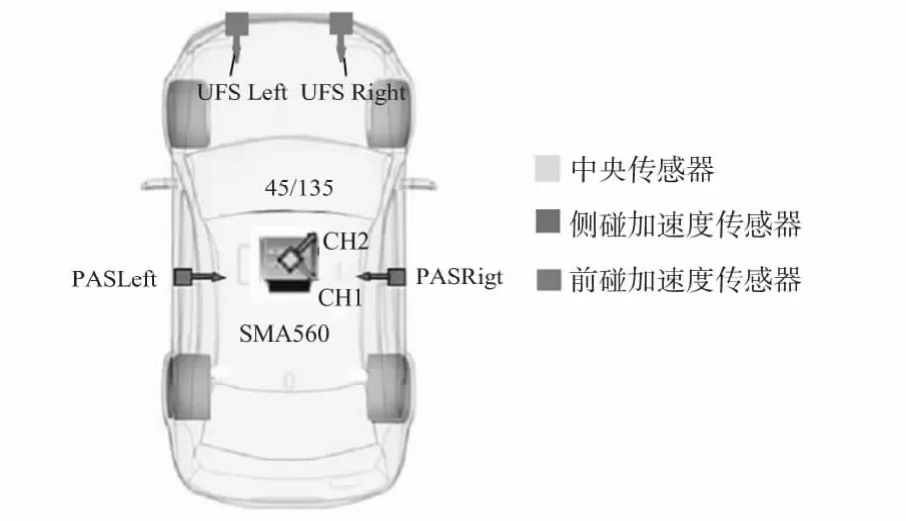
圖3 系統安裝圖Fig 3 Installation diagram of system
2.3 通信設計
2.3.1 PSI5
外圍加速度傳感器接口標準主要有分布系統接口(distributed system interface,DSI)和外圍傳感器接口(peripheral sensor interface 5,PSI5)兩種。PSI5 是一種開放標準的傳感器接口,根據其通信協議的技術特性和低成本等特點,本文設計采用V2.0 版PSI5 標準。
2.3.2 通信原理
PSI5 接收器通過點對點的方式,可以同時實現與多個外圍加速度傳感器相連。采用電流調制法,通過雙線將數據傳遞到PSI5 接收器。PSI5 接收端給傳感器提供穩定電壓,同時檢測電流情況。當電流值接近傳感器靜態電流時,邏輯信號為‘低’;當電流值高出靜態電流約20 mA 時,邏輯信號為‘高’。PSI5 采用Manchester 式編碼,即在發送的每一位中部有一個電流的上升沿代表邏輯‘0’;有一個下降沿代表邏輯‘1’。然后PSI5 接收器再將數據通過串行外圍接口(serial peripheral interface,SPI)總線傳送到控制單元[7]。
本系統采用雙線通信,并對傳感器供電;同步獲取傳感器數據;數據長度可變(可變范圍10 ~28 位),Manchester式編碼通信速度125 kbps。外圍加速度傳感器采用ADXL50 芯片,中央加速度傳感器采用SMA560 雙軸傳感器,其測量范圍±50gn。串口控制單元采用VP05028X 芯片通過PSI5 協議與加速度傳感器連接。控制單元再通過SPI 總線將數據傳送到采用TMS 470 為芯片的中央控制單元進行邏輯運算,如圖4 所示。
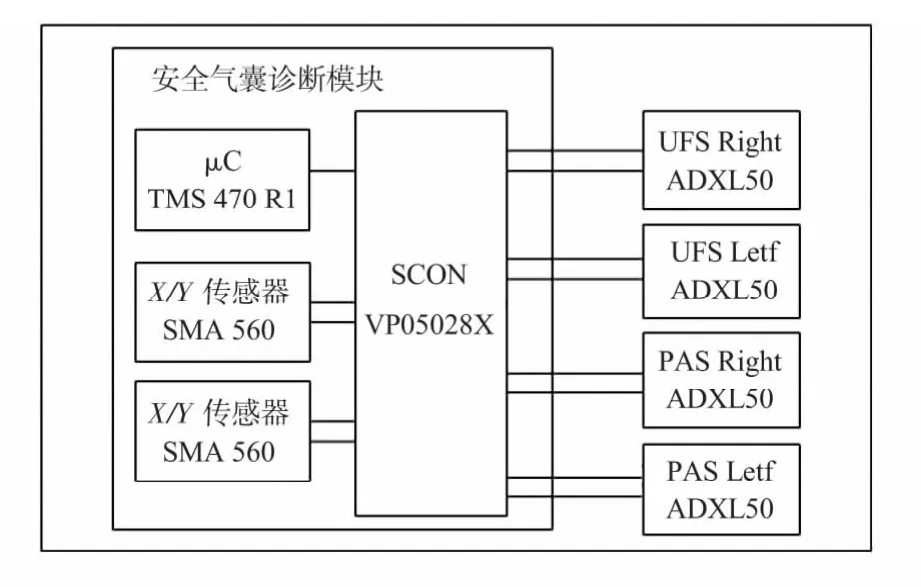
圖4 系統電路圖Fig 4 System circuit diagram
2.4 系統模擬
研究撞車時乘員安全有關的車輛結構變形和零部件強度與結構變形問題,現在通常采用非線性大變形有限元方法。
目前現有的仿真軟件根據其建模方法和功能不同分為兩類:一類是采用顯式有限元理論建模,研究撞車時乘員安全有關的車輛結構變形和零部件強度與結構變形問題。以美國LS-DYNA3D 和法國PAM-CRASH 軟件為代表;另一類采用多剛體系統動力學理論建模,主要用來模擬碰撞事故中乘員的運動狀況,乘員與周圍的相互作用,有美國CAL3D 和荷蘭MADYMO 軟件[7]。
通過模擬碰撞試驗,由計算機分別獲取以15,64 km/h的速度發生正面碰撞時,UFS 和中央傳感器檢測到的加速度。由圖5 可以看出:根據UFS 的檢測數據發出點火指令的時間早于根據中央傳感器的數據而發出點火指令的時間。通過分析可以知道,由于UFS 通過MEMS 原理直接檢測碰撞時產生的加速度,而中央傳感器位于汽車中央,當發生碰撞時,加速度要通過前橫梁、縱梁、底盤才能傳遞到中央傳感器,并且由于偏置碰撞、角度碰撞、前機艙潰縮以及非剛性傳遞等因素的影響,檢測加速度被減弱。因此,外圍加速度傳感器檢測到的數據更加精確,并能使控制單元更早地發出點火指令。
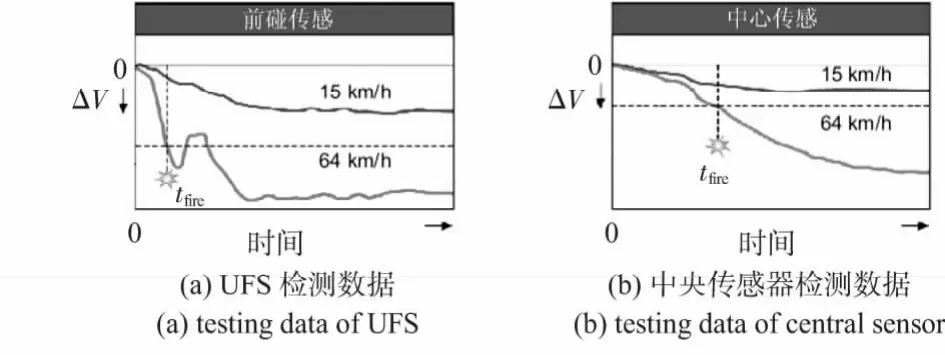
圖5 模擬實驗數據擬合圖Fig 5 Fitting figure of simulation experimental data
3 碰撞實測
對于起亞HM 車型碰撞試車,通過OBD 接口,實現電腦與SDM 模塊的連接通信。利用Windiag 軟件讀取存儲于SDM 模塊EEPROM 中的碰撞數據。可以讀取到連續50 組兩側前碰傳感器數據、連續100 組兩側外圍加速度傳感器數據和連續220 組X/Y 軸中央傳感器數據。得到的數值為1 ms 間隔的十六進制值。將二位十六進制值轉換成十進制值得到0 ~255 范圍的值。假設十進制數為X,加速度為g(gn)。
對于前碰傳感器,其運算如下:
1)當X >128 時,g=2×(256-X);
2)當X≤128 時,g=-2X。
可以分別得到兩側前碰加速度傳感器所檢測到的加速度值,如表1。
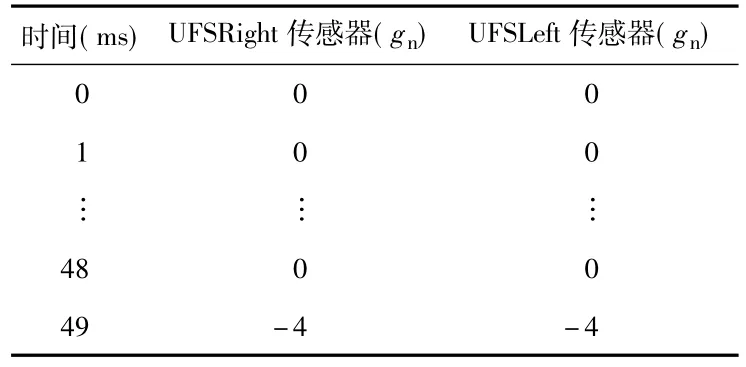
表1 前碰傳感器測試數據表Tab 1 Table of UFS testing data
對于X/Y 軸中央傳感器,其運算如下:
1)當X >128 時,g=2×(256-X);
2)當X≤128 時,g=-2X。
可以分別得到兩側外圍加速度傳感器所檢測到的加速度值,如表2。
對于前碰傳感器,其運算如下:
1)當X >128 時,g=0.8×(256-X),并取整;
2)當X≤128 時,g=-0.8X,并取整。
可以分別得到X/Y 軸中央傳感器所檢測到的加速度值,如表3。
將表1、表2、表3 中6 只加速度傳感器檢測到的加速度值擬合成如圖6 所示的加速度曲線圖。
通過對圖6的數據分析,可以清楚地看到左右兩側的外圍加速度傳感器檢測到持續的劇烈碰撞加速度,可以判定該生發生了側碰;中央加速度傳感器與外圍傳感器均采集到連續的碰撞信號,但加速度曲線波形平緩,可以判定在碰撞過程中,加速度在傳遞過程中發生了減弱,因此,通過加入外圍加速度傳感器可以提高其精度和準確度。
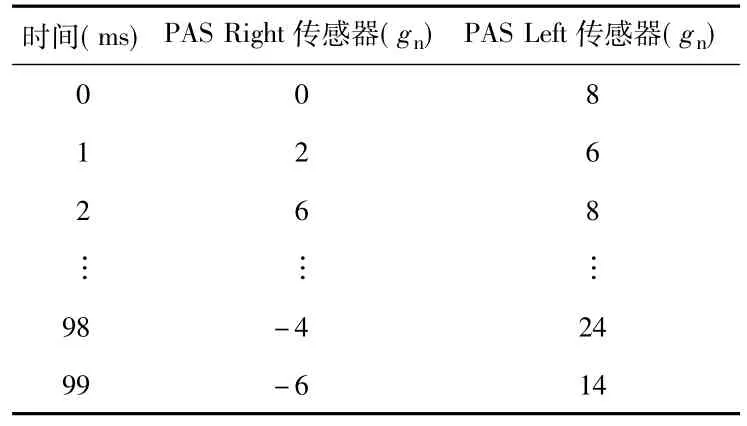
表2 側碰傳感器測試數據表Tab 2 Table of PAS testing data
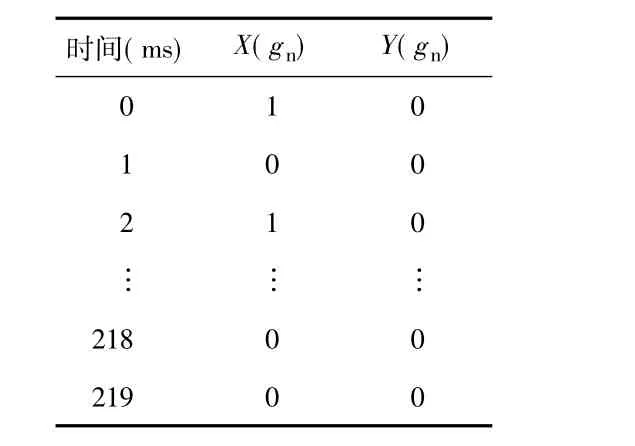
表3 X/Y 軸傳感器測試數據表Tab 3 Table of X/Y axis sensor testing data
4 結束語
本文針對安全氣囊,通過設計一種基于MEMS 的外圍加速度傳感器,實現了安全氣囊系統性能的提升。通過試驗模擬和對實際碰撞數據結果的分析,證明了其能增強安全氣囊對碰撞類型的識別,而且更重要的是能大大提早安全氣囊發出點火指令的時間。本系統結構簡單,可靠性強,使其能夠在汽車安全氣囊系統中得到廣泛應用,滿足現代汽車發展對安全性的要求。
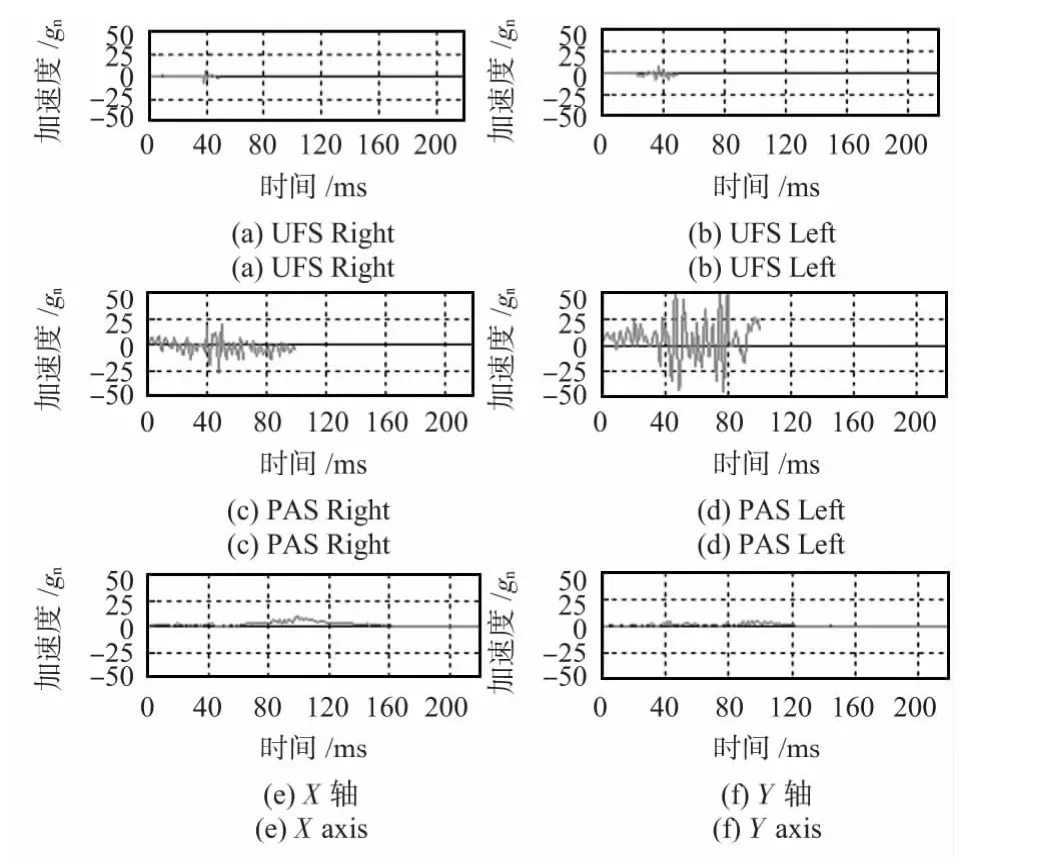
圖6 碰撞數據擬合圖Fig 6 Fitting diagram of collision datas
[1] 賀展開,龔曉艷.汽車傳感器的檢測[M].2 版.北京:機械工業出版社,2011:175-176.
[2] 張海濤,閻貴平.MEMS 加速度傳感器的原理及分析[J].電子工藝技術,2003,24(6):1-2.
[3] 肖 鵬.基于MEMS 技術的差分電容式加速度微傳感器的研究和設計[D].西安:西安電子科技大學,2006:26-36.
[4] 王小鑫.差動電容式加速度傳感器測量系統的研究與應用[D].西安:西安科技大學,2012:7-10.
[5] 石庚辰.微機械加速度傳感器及應用[J].測控技術,2003,22(3):2-3.
[6] 文洪奎.汽車安全氣囊控制單元的設計與實現[D].上海:上海交通大學,2011:19-21.
[7] 何 文.汽車安全氣囊工作過程計算機仿真理論與實驗驗證技術研究[D].長沙:湖南大學,2002:15-16.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34