基于分段信號假設檢驗的方差估計算法*
2015-03-30 05:53:56袁燎原章衛國劉小雄
傳感器與微系統 2015年7期
袁燎原,章衛國,劉 洋,劉小雄
(西北工業大學 自動化學院,陜西 西安710072)
0 引 言
加權數據融合算法根據傳感器的方差分配權系數,在精度較差的傳感器參與融合的情況下,依然能夠提高融合精度,因此,該算法得到了廣泛的應用[1~6]。而實際中傳感器的測量噪聲受到傳輸誤差、環境噪聲以及人為干擾等多因素影響,方差并非始終不變,不能簡單等同于傳感器自身方差參數或通過經驗指定,需要采用算法進行實時估計。方差估計的準確與否決定了最終融合結果的精度。
典型的方差估計算法包括相關系數法[3,4]和平均值偏差法[5]。上述兩種方法中所采用的移動數據窗長度固定,對測量噪聲變化缺乏自適應性,無法同時保證方差變化時的快速跟蹤和方差不變時的精確估計,會導致融合精度的下降。
本文在平均值偏差法的基礎上,提出了一種改進算法,通過引入多元假設檢驗環節實現移動數據窗長度的自適應調整,提高方差估計的精度。
1 平均值偏差法
由于各待測狀態量通常為解耦的,不失一般性,選取測量一維狀態量的多傳感器系統作為研究對象。n 只傳感器對系統狀態參數的量測方程為

式中 x 為一維狀態量,Y=[y1y2… yn]T為n 維測量向量,e=[e1e2… en]T為n 維測量噪聲向量,ei相互獨立且滿足為各傳感器測量方差,H=[1,…,1]T。
在線性最小方差估計的準則下,加權融合估計值為


融合誤差為
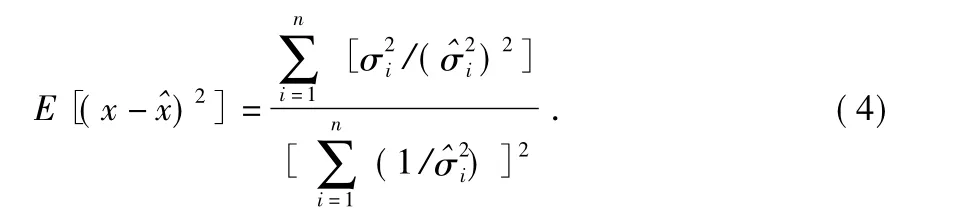
式中 yij為第i 傳感器第j 次的采樣值,N 為移動數據窗長度。

2 改進算法
基于上述分析,設計改進算法流程如圖1 所示。方差估計采用自適應長度數據窗,當給出方差不變決策時,數據窗長度不斷遞增,從而減小方差估計誤差;當給出方差變化決策時,數據窗長度從1 重新開始增加。
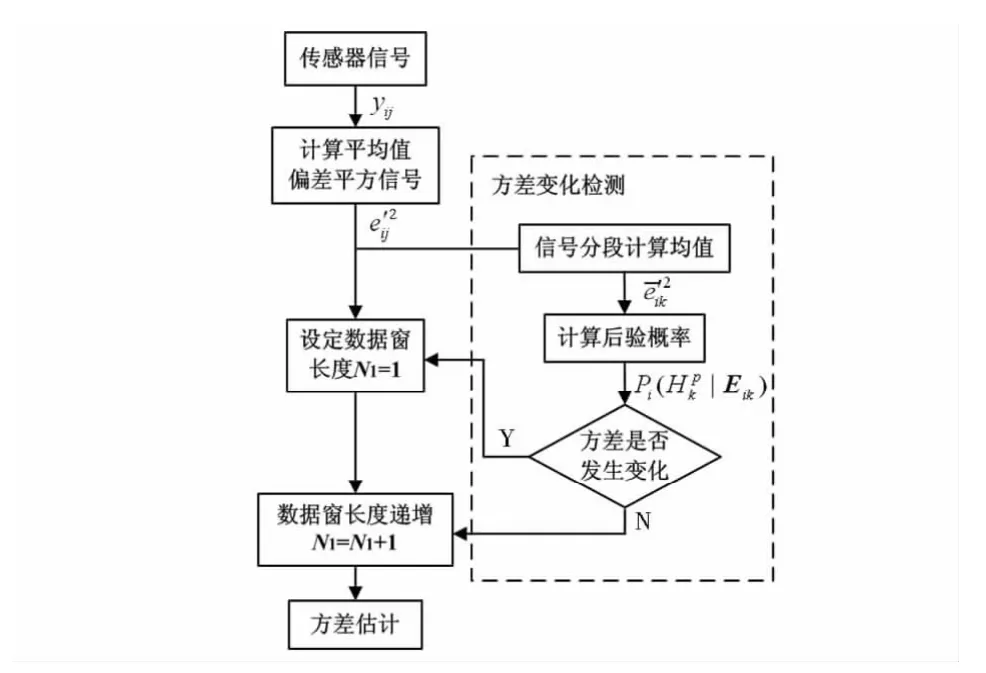
圖1 改進的算法流程Fig 1 Flow chart of the improved algorithm
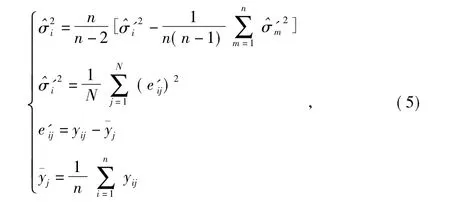
方差估計環節采用基于式(5)的遞推形式,表達式為

方差變化檢測環節通過平均值偏差分段信號的多元假設實現,變化檢測的主要作用在于及時改變數據窗長,避免N1過大導致最新采樣數據影響減小,估計值滯后的問題。變化檢測的具體設計如下。
2.1 信號分段處理

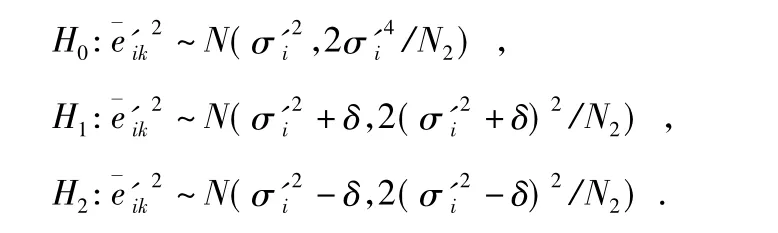
根據中心極限定理可得,當分段長度N2充分大時,信號均值逼近正態分布過程。待檢測的多元假設檢驗為假設H0代表測量噪聲方差不變,假設H1,H2分別代表方差增大和減小。
2.2 后驗概率的遞推計算
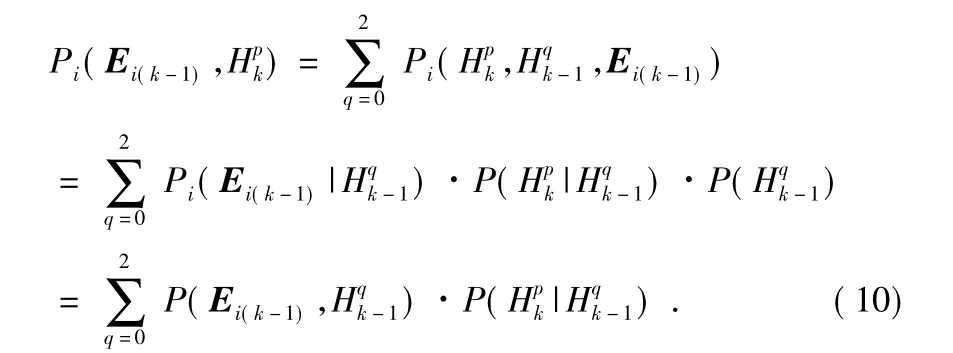
多元假設檢驗的典型判決方法為依據最大后驗概率準則進行決策[8]。本文根據馬爾可夫狀態轉移的思想,對后驗概率的實時遞推計算公式進行推導:
在每一采樣時刻k,將假設Hp(p=0,1,2)成立,定義為一個獨立的事件。3 個事件組成了馬爾可夫過程的狀態集合。事件、狀態與假設一一對應,分析中不再作區分。

根據Ei(k-1)與以及馬爾可夫狀態之間的獨立性,對進行推導
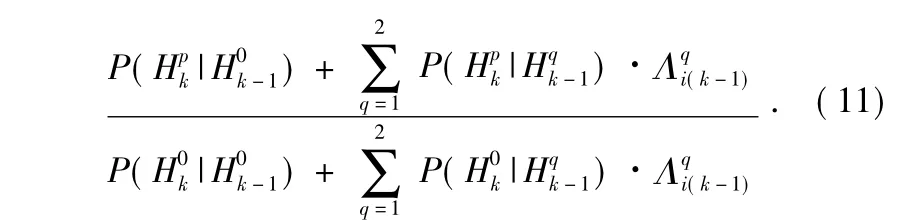
根據實際工程中的以下條件,可以對式(11)進一步化簡:
基于步驟(1)~(3),式(11)可化為
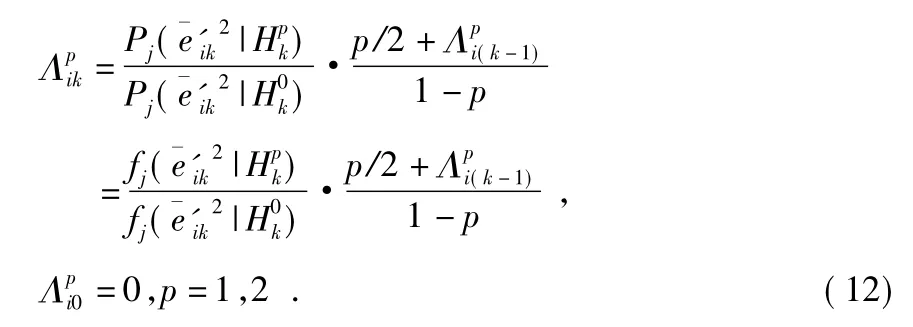
通過式(12)~式(14)即可實現后驗概率的實時遞推計算,從而根據最大后驗概率準則進行方差變化的檢測決策。
3 仿真與分析
選取四余度角位移傳感器系統為仿真對象,構建測量噪聲不變與變化兩種仿真環境。傳感器測量噪聲服從正態分布,標準差分別為:0.09,0.1,0.15,0.3,采樣周期T=0.02 s,仿真時間t=50 s。測量噪聲變化設置為:在仿真時刻t=10 s 時,標準差變為0.17,0.2,0.26,0.11。融合精度的評價指標為均方根誤差(RMSE)。
3.1 平均值偏差法的局限性
1)測量噪聲穩定的情況
采用平均值偏差法對傳感器1~4 以及方差相近的傳感器1~3 分別進行方差估計并進行加權融合,均方根誤差為RMSE1和RMSE2。方差準確已知下傳感器1~4 融合結果的均方根誤差為RMSE3。傳感器4 的方差估計誤差最大,是影響信息融合精度的主要因素,其均方根誤差記為表1 給出了不同數據窗長度N1設置下,上述精度指標之間的對比。
由表1 可知,當N1設置較小時,方差估計存在較大誤差,當N1<100 時,RMSE1>RMSE2表明傳感器4 信號的引入不但未能提高融合精度,反而由于方差估計誤差的影響導致傳感器4 信號的權系數不夠準確,使得傳感器1~4 融合精度要小于傳感器1~3 的融合精度。因此,為獲得理想的融合效果,需要增大N1的值。
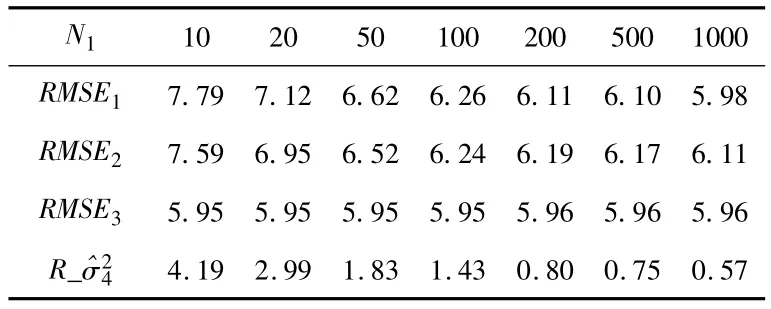
表1 數據窗長與融合誤差(0.01°)間的關系Tab1 Relationship between length of data window and fusion error
2)測量噪聲變化的情況
通過將參數N1設置為較大值可以有效提升測量噪聲穩定時的融合精度。當N1=1000,RMSE1與RMSE3基本相等,此時方差估計誤差對融合精度的影響可以忽略。
然而,測量噪聲變化時,圖2 所示的方差估計值跟蹤靈敏度明顯下降,方差估計值存在N1T 時間的滯后。在未得到穩定方差估計前,融合精度必然受到影響,具體融合精度變化曲線在3.2 小節給出。

圖2 測量噪聲變化時典型方法的方差估計曲線Fig 2 Variance estimation curve with typical method under noise change condition
3.2 改進方法的仿真對比
采用改進方法對傳感器1~4 進行方差估計和加權數據融合。改進方法的參數設置為:信號分段長度N2=20,p=4×10-5。測量噪聲穩定時,融合結果的均方根誤差RMSE=0.059 7°,與方差已知時的融合精度基本相同,表明方差估計誤差的影響得以消除。噪聲變化時的方差估計結果如圖3 所示,改進方法相對于平均值偏差法,能夠更快速地實現對噪聲方差變化的跟蹤。
進一步比較噪聲變化時兩種方法加權融合精度,分別采用改進方法與典型方法進行5000 次加權融合實驗,融合結果的均方根誤差如圖4 所示。對比均方根誤差曲線可知,測量噪聲穩定時,兩種方法的融合精度相當;而當噪聲發生變化時,改進方法的融合精度明顯高于固定N1取值的典型方法。
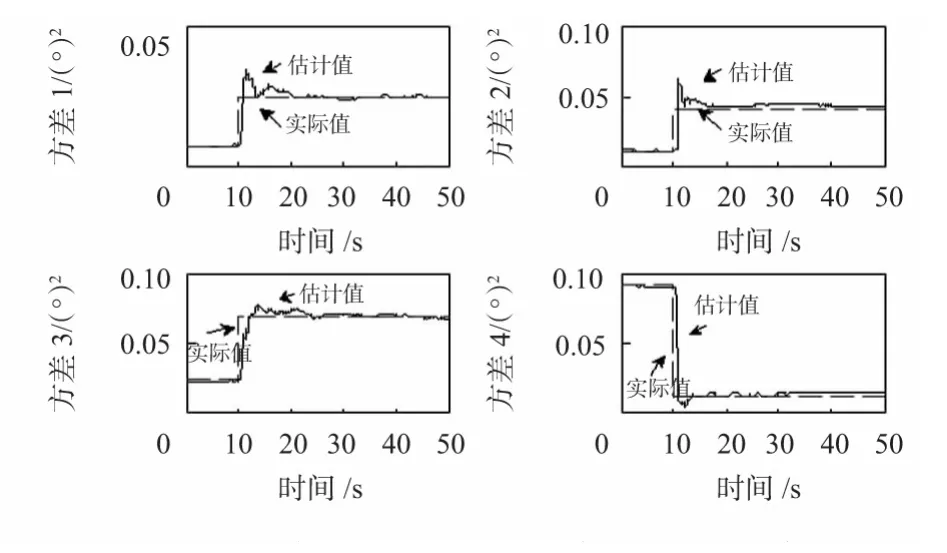
圖3 測量噪聲變化時改進方法的方差估計曲線Fig 3 Variance estimation curve with the improved method under noise change condition
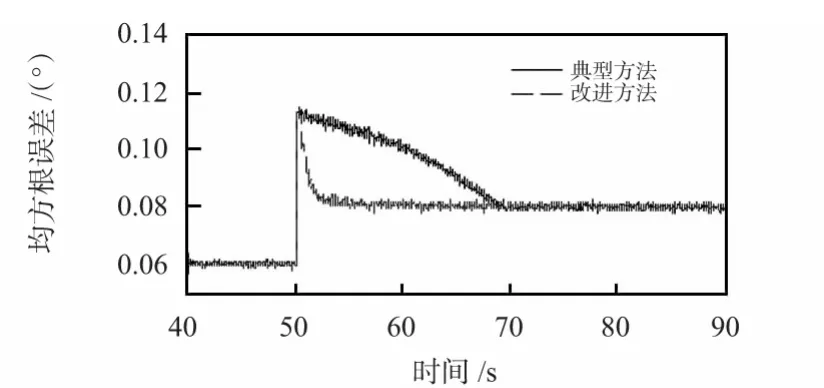
圖4 兩種方法的融合精度對比Fig 4 Fusion precision comparison between two methods
4 結 論
1)平均值偏差法無法兼顧測量噪聲穩定時的方差估計精度和測量噪聲變化時的跟蹤靈敏性。參數N 設置較小,精度較差傳感器信號參與加權融合不能提升融合精度;參數N 設置較大,則無法避免測量噪聲變化時的融合精度下降。因而,該方法具有較大的局限性。
2)改進方法通過自適應移動數據窗和假設檢驗環節設計,有效克服了典型方法的上述局限,仿真結果驗證了所提方法的正確性和優越性。
[1] Khaleghi B,Khamis A,Karray F O,et al.Multi-sensor data fusion: A review of the state-of-the-art[J].Information Fusion,2013,14(1):28-44.
[2] 周 軍,王志勝,周鳳岐.基于線性均方估計的數據融合理論[J].宇航學報,2003,24(4):364-367.
[3] 李 偉,何鵬舉,高社生.多傳感器加權信息融合算法研究[J].西北工業大學學報,2010(5):674-678.
[4] 胡士強,張天橋.多傳感器在線自適應加權融合跟蹤算法[J].北京理工大學學報,2002,22(1):117-120.
[5] 仲崇權,董西路,張立勇,等.多傳感器測量中的方差估計[J].數據采集與處理,2004,18(4):412-417.
[6] Gao Shesheng,Zhong Yongmin,Zhang Xueyuan,et al.Multi-sensor optimal data fusion for INS/GPS/SAR integrated navigation system[J].Aerospace Science and Technology,2009,13:232-237.
[7] 吳利平,李 贊,李建東,等.基于信號分段處理的截尾型序貫檢驗算法[J].電子學報,2011,39(10):2412-2416.
[8] Ray A,Phoha S.Calibration and estimation of redundant signals for real-time monitoring and control[J].Signal Processing,2003,83(12):2593-2605.
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34