一種兩船橫向液貨補(bǔ)給錯(cuò)位角測(cè)量裝置設(shè)計(jì)
2015-03-30 05:53:42于清超楊國(guó)文
傳感器與微系統(tǒng) 2015年7期
關(guān)鍵詞:測(cè)量
王 嶺,魏 威,于清超,陳 曦,董 峰,楊國(guó)文
(1.天津大學(xué) 精密儀器與光電子工程學(xué)院,天津300072;2.天津航海儀器研究所,天津300456)
0 引 言
海上橫向液貨補(bǔ)給是指通過(guò)補(bǔ)給船左右舷的門架對(duì)海上作業(yè)的船舶進(jìn)行的液貨補(bǔ)給。海上補(bǔ)給通常在復(fù)雜的海洋環(huán)境情況下進(jìn)行,補(bǔ)給作業(yè)期間要求補(bǔ)給船與接收船間保持同向、同速航行,而且兩船間錯(cuò)位角要保持在一定的安全閾值內(nèi)。因此,在橫向液貨補(bǔ)給過(guò)程中,對(duì)兩船間錯(cuò)位角的實(shí)時(shí)、準(zhǔn)確測(cè)量成為關(guān)系到補(bǔ)給作業(yè)是否能安全進(jìn)行的重要環(huán)節(jié)之一。
目前,海上補(bǔ)給船通常利用六分儀全程手動(dòng)測(cè)量,此人工測(cè)量方式很難適應(yīng)在惡劣的海況下長(zhǎng)時(shí)間的實(shí)時(shí)精確測(cè)量[1,2]。因此,研發(fā)一種自動(dòng)錯(cuò)位角測(cè)量裝置成為迫在眉睫的需求。鑒于計(jì)算機(jī)和光電技術(shù)的迅猛發(fā)展,進(jìn)行了常規(guī)的激光測(cè)距、圖像自動(dòng)識(shí)別測(cè)量技術(shù)和激光掃描技術(shù)的方案論證工作。其中,帶有伺服跟蹤系統(tǒng)的激光測(cè)距技術(shù)需要在被補(bǔ)給船上放置一合作目標(biāo),這使得海上補(bǔ)給受到很大的條件限制[3];基于CCD 視頻成像的目標(biāo)自動(dòng)識(shí)別技術(shù),則受限于夜間補(bǔ)給作業(yè)時(shí)光場(chǎng)分布的不均勻性,很難達(dá)到理想的識(shí)別效果;而激光掃描法是通過(guò)激光掃描的方式形成被補(bǔ)給船的激光點(diǎn)陣[4,5],由于數(shù)據(jù)量太大,時(shí)效性差,且性價(jià)比較低。
基于以上方式的論證分析,本文采用了結(jié)構(gòu)簡(jiǎn)單,性能可靠的機(jī)電測(cè)量方法。通過(guò)實(shí)驗(yàn)表明:該裝置具有無(wú)需合作目標(biāo)、不受光場(chǎng)分布影響的特點(diǎn),不僅結(jié)構(gòu)簡(jiǎn)單、性能穩(wěn)定可靠,而且測(cè)量過(guò)程全自動(dòng),精度較高,實(shí)時(shí)性強(qiáng)。
1 基本原理
兩船間橫向液貨補(bǔ)給的工作過(guò)程如圖1 所示。補(bǔ)給船與被補(bǔ)給船進(jìn)入補(bǔ)給陣位后,補(bǔ)給船用手持式撇纜槍將引纜發(fā)射至被補(bǔ)給船,絞車通過(guò)引纜將承載索牽引至被補(bǔ)給船,并將輸液管線接頭上的環(huán)形纜掛接在被補(bǔ)給船液貨接收口的快速脫鉤上,實(shí)現(xiàn)補(bǔ)給船和被補(bǔ)給船上的油口對(duì)接,進(jìn)行液貨補(bǔ)給。
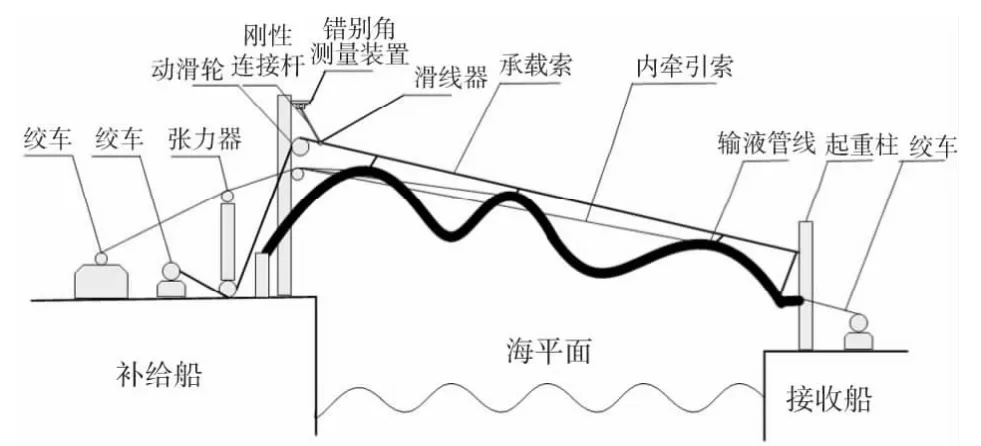
圖1 兩船間補(bǔ)給工作過(guò)程示意圖Fig 1 Diagram of replenishment process between two ships
錯(cuò)位角測(cè)量裝置安置在承載索動(dòng)滑輪的正上方,通過(guò)劃線器和剛性連接桿與承載索實(shí)現(xiàn)連接。隨著測(cè)量船與補(bǔ)給船之間錯(cuò)位角的變化,承載索通過(guò)剛性機(jī)構(gòu)將角度的變化轉(zhuǎn)換為測(cè)量裝置中彈簧的橫向位置變化,彈簧則將角度信息以壓力的形式傳遞給拉力傳感器,從而實(shí)現(xiàn)兩船錯(cuò)位角的測(cè)量。
2 幾何模型
從功效來(lái)講,改裝置主要是避免因承載索與補(bǔ)給船縱向法矢量的角度過(guò)大,而引起的承載索繃斷,降低人身與設(shè)備的損傷。在此規(guī)定:兩船間錯(cuò)位角為連接兩船的承載索與補(bǔ)給船縱向法矢量的角度在海平面上的投影角度。當(dāng)纜繩與補(bǔ)給船縱向法矢量平行時(shí)為初始0 值,并以此法矢量為初始方位,順時(shí)針角度值為正,逆時(shí)針角度值為負(fù)。
根據(jù)錯(cuò)位角測(cè)量裝置的安裝位置建立幾何模型如圖2所示。O'為測(cè)量裝置的角點(diǎn)位置,O 為承載索的上方接觸點(diǎn),OO'之間的距離為h。OD'為錯(cuò)位角等于0 時(shí)的承載索位置;O'D'為錯(cuò)位角測(cè)量裝置的剛性連接桿;其中,OD'在水平面內(nèi)的投影方向?yàn)镺D 矢量方向。△OAB 所在平面為與海平面平行的水平面;△OA'B'所在平面為承載索的工作平面;△O'A'B'所在平面為剛性連接桿的工作平面。通過(guò)拉壓傳感器直接線性測(cè)得的角度值為∠A'O'B',而待測(cè)錯(cuò)位角為∠A'OB'在水平面內(nèi)的投影值為∠A'O″B',其角度的標(biāo)識(shí)如圖3 所示。
在△O'A'B'中,∠A'O'B'=β',A'O'=O'B'=l,則

在△O'OD'中,∠O'OD'=90°+θ,OO'=h,則
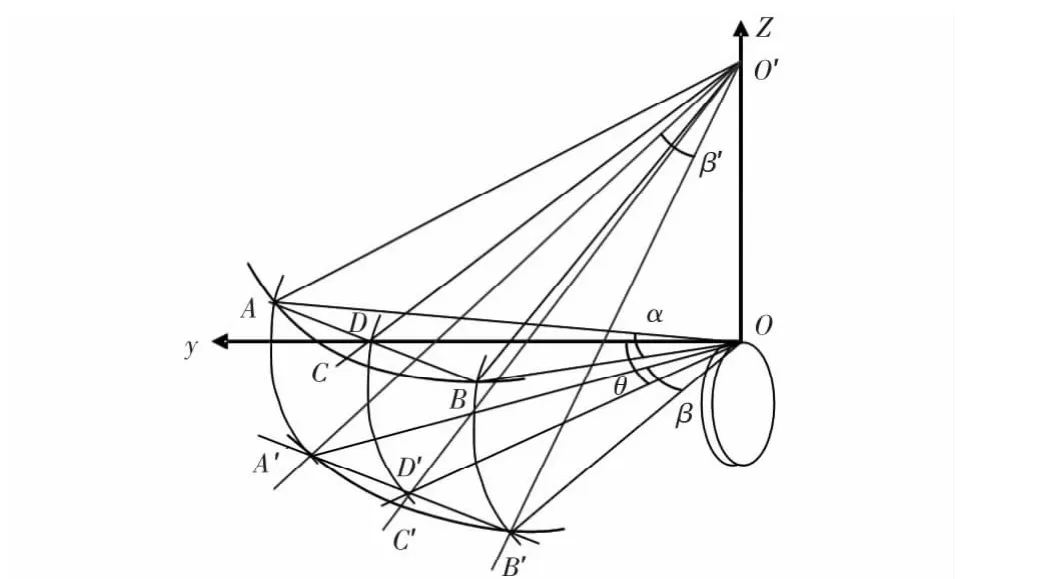
圖2 錯(cuò)位角測(cè)量裝置幾何模型Fig 2 Geometry model for deviation angle measuring device

在△OA'B'中,結(jié)合式(2)和式(3),可得承載索工作平面內(nèi),承載索的轉(zhuǎn)動(dòng)角度為

為求得水平面內(nèi)的水平錯(cuò)位角,將△OA'B'向水平面內(nèi)做投影,可得原點(diǎn)O 的垂足為O″,由此在△O″A'B'所在平面內(nèi)可得

在△O″A'B'中,可求得兩船間錯(cuò)位角為

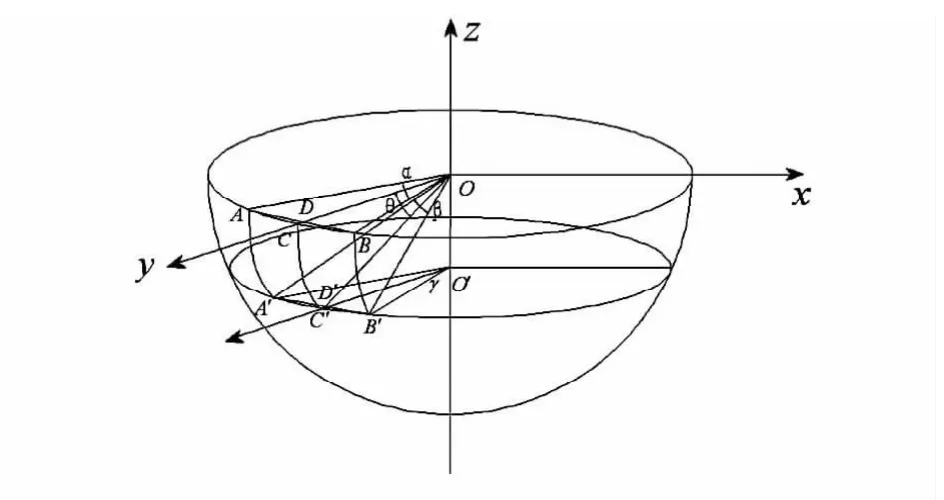
圖3 水平面內(nèi)錯(cuò)位角幾何量示意圖Fig 3 Diagram of horizontal plane geometrical deviation angle
3 系統(tǒng)設(shè)計(jì)
測(cè)量裝置的彈簧拉壓機(jī)構(gòu)采用對(duì)稱的注射器套筒工作模式。在剛性連接桿零值附近的移動(dòng)過(guò)程中,首先要保證兩組彈簧受力主軸線的同軸性,以降低在工作過(guò)程中因摩擦力帶來(lái)的誤差。
3.1 傳感器的選擇
3.1.1 拉壓傳感器的選擇
拉壓傳感器是整個(gè)系統(tǒng)的信息轉(zhuǎn)換核心部件,其測(cè)量范圍、測(cè)量精度及其工作的穩(wěn)定性直接決定了系統(tǒng)的完善與否。本系統(tǒng)采用應(yīng)變式拉壓傳感器。
3.1.2 彈簧設(shè)計(jì)
彈簧是測(cè)量裝置拉壓傳感器與承載索的直接紐帶,將承載索的角度信息以線位移的形式轉(zhuǎn)換為對(duì)應(yīng)的應(yīng)變力,從而通過(guò)拉壓傳感器轉(zhuǎn)換為相應(yīng)的電信號(hào)輸出。因此,彈簧的選擇、設(shè)計(jì)直接關(guān)系著整個(gè)系統(tǒng)的測(cè)量精度。
基于虎克定律和錯(cuò)位角測(cè)量裝置的幾何約束條件,彈簧在最大拉壓應(yīng)力為20 N 的條件下,產(chǎn)生的最大形變量應(yīng)控制在12 cm 以內(nèi)。為滿足測(cè)量系統(tǒng)在±30°的測(cè)量范圍要求,對(duì)彈簧的結(jié)構(gòu)尺寸進(jìn)行合理的計(jì)算、設(shè)計(jì)。
3.2 電路設(shè)計(jì)
為了將傳感器輸出的電信號(hào)轉(zhuǎn)換為可以顯示的角度數(shù)字信息,設(shè)計(jì)其后續(xù)的處理電路框圖如圖4 所示。

圖4 后續(xù)電路處理框圖Fig 4 Processing block diagram of subsequent circuit
該系統(tǒng)工作溫度為-25 ~+65 ℃,為消除溫差變化給系統(tǒng)帶來(lái)的影響,同時(shí)提高測(cè)量系統(tǒng)的靈敏度的考慮,本裝置采用全橋電路對(duì)電阻的相對(duì)變化進(jìn)行測(cè)量,此外,該機(jī)構(gòu)還具有溫度補(bǔ)償作用和非線性校正作用。在拉壓傳感器滿量程壓力20 N 的作用下,假定設(shè)備在測(cè)量時(shí)其位置與角度為線性關(guān)系,在滿足系統(tǒng)的測(cè)量精度下設(shè)計(jì)其輸出的電壓值為6 μV。為了實(shí)現(xiàn)A/D 轉(zhuǎn)換的最低電壓輸入要求,選用AD620AR 和AD823AN 對(duì)直流電橋輸出的原始信號(hào)進(jìn)行了兩級(jí)放大,使輸出的電平信號(hào)在[-4,+4]V 之間。
在測(cè)量過(guò)程中,承載鎖會(huì)受電機(jī)振動(dòng)、波浪高頻分量和風(fēng)外載荷的影響出現(xiàn)干擾信號(hào)。因此,需要對(duì)信號(hào)進(jìn)行必要的低頻濾波處理[6,7],為此,基于AD823AN構(gòu)建低通濾波器對(duì)放大后的輸出信號(hào)進(jìn)行上限截止頻率為10 Hz 的信號(hào)濾波,以消除以上外界因素的影響。
本A/D 轉(zhuǎn)換采用的外置高電平的處理模式,在A/D轉(zhuǎn)換方面,基于測(cè)量量程和測(cè)量精度的綜合考慮,通過(guò)中央處理單元根據(jù)測(cè)量原型對(duì)實(shí)際的兩船間錯(cuò)位角信息進(jìn)行解算。為此,基于AD823AN 對(duì)輸出信號(hào)進(jìn)行了[-4,+4]V與[1.5,3.5]V 之間的對(duì)應(yīng)電平轉(zhuǎn)換,然后基于第一節(jié)的測(cè)量原理通過(guò)PIC16F877T 直接對(duì)輸出信號(hào)進(jìn)行A/D 的轉(zhuǎn)換和角度解析,最后通過(guò)數(shù)碼管對(duì)測(cè)量角度進(jìn)行數(shù)字顯示。
4 測(cè)試結(jié)果
該錯(cuò)位角測(cè)量裝置如圖5 所示。為了驗(yàn)證本測(cè)量裝置的測(cè)量精度,在實(shí)驗(yàn)室環(huán)境下通本測(cè)量裝置與配套的滑輪、纜繩機(jī)構(gòu)進(jìn)行了大量的模擬仿真實(shí)驗(yàn)。
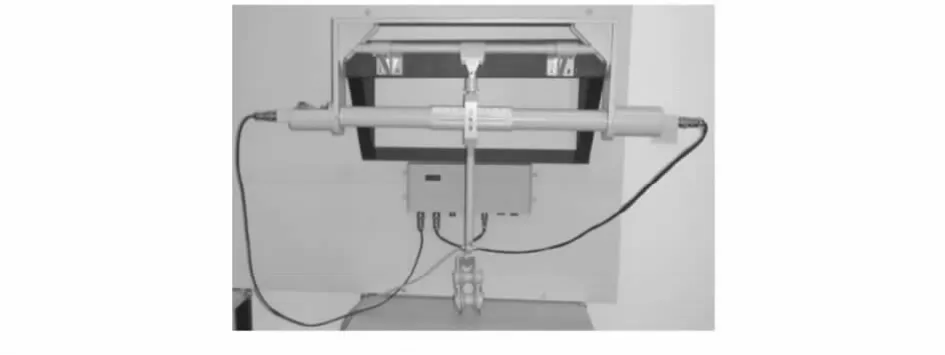
圖5 兩船間錯(cuò)位角測(cè)量裝置Fig 5 Device for deviation angle measuring between two ships
以角度校正后的水平放置的測(cè)量筒為基準(zhǔn),對(duì)模擬環(huán)境下穿過(guò)劃線器的纜繩進(jìn)行角度的測(cè)量。為了評(píng)價(jià)該裝置的測(cè)量精度,對(duì)±30°的測(cè)量范圍內(nèi),對(duì)兩船間錯(cuò)位角進(jìn)行了10 次的模擬仿真測(cè)量,并對(duì)其最大誤差、最小誤差、平均誤差和標(biāo)準(zhǔn)偏差進(jìn)行了統(tǒng)計(jì),具體結(jié)果如表1 所示。
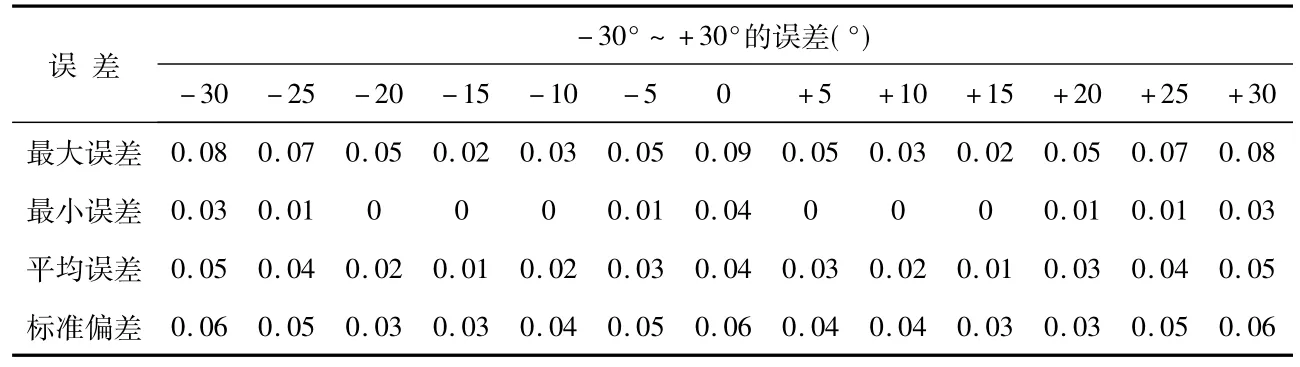
表1 兩船間錯(cuò)位角測(cè)量的誤差統(tǒng)計(jì)表Tab 1 Error statistical table of deviation angle measurement between two ships
從表1 中可以看出:兩船間的錯(cuò)位角測(cè)量精度的最大誤差為0.08°,最大的平均偏差和標(biāo)準(zhǔn)偏差分別為0.05°,0.06°,且最大誤差值出現(xiàn)在零值和邊界值。實(shí)驗(yàn)表明:此裝置可滿足兩船間的錯(cuò)位角測(cè)量精度的要求。
5 結(jié) 論
本文設(shè)計(jì)了一種海上兩船補(bǔ)給作業(yè)時(shí)的錯(cuò)位角測(cè)量裝置。本研究在幾何建模的基礎(chǔ)上,通過(guò)傳感器的選擇,結(jié)構(gòu)和電路方面的設(shè)計(jì),實(shí)現(xiàn)了兩船間錯(cuò)位角信息的測(cè)量。通過(guò)實(shí)驗(yàn)表明:本裝置穩(wěn)定、可靠,具有較高的測(cè)量精度。
[1] 李永廣,范嘉芳.“航海學(xué)”六分儀測(cè)距定位教學(xué)項(xiàng)目的開(kāi)發(fā)和設(shè)計(jì)[J].南通航運(yùn)職業(yè)技術(shù)學(xué)院學(xué)報(bào),2012(3):119-122.
[2] 胡穩(wěn)才,吳廣華,黃麗卿.航海電子六分儀測(cè)角傳感系統(tǒng)研究[J].上海海運(yùn)學(xué)院學(xué)報(bào),2002,23(3):17-20.
[3] 徐 峰,吳易明,王衛(wèi)峰,等.基于光電傳感器的位標(biāo)器方位角測(cè)量方法[J].紅外與激光工程,2012(5):1357-1362.
[4] 于彥梅.激光測(cè)距機(jī)及發(fā)展趨勢(shì)[J].情報(bào)指揮控制系統(tǒng)與仿真技術(shù),2002(8):19-21.
[5] 趙 娜.激光測(cè)距技術(shù)[J].科技信息,2011(4):119-120.
[6] 姚常飛,周 明,羅運(yùn)生,等.基于巴特沃斯低通濾波器的毫米波寬帶低插損限幅器研究[J].電子學(xué)報(bào),2013(9):1809-1814.
[7] 柏受軍,王 鳴,郎 朗,等.LVDT 尾翼傳感器電壓電流轉(zhuǎn)換電路的設(shè)計(jì)[J].傳感器與微系統(tǒng),2012,31(4):113-115.
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00