基于系統相似方法的疊堆型壓電驅動器非線性動力學建模及實驗研究
2015-03-17 02:36:41官長斌汪旭東焦宗夏
振動與沖擊 2015年9期
官長斌, 陳 君, 汪旭東, 焦宗夏
(1.北京控制工程研究所,北京 100080; 2. 北京航空航天大學 自動化科學與電氣工程學院,北京 100191)
基于系統相似方法的疊堆型壓電驅動器非線性動力學建模及實驗研究
官長斌1, 陳 君1, 汪旭東1, 焦宗夏2
(1.北京控制工程研究所,北京 100080; 2. 北京航空航天大學 自動化科學與電氣工程學院,北京 100191)
根據機械系統與電氣系統的相似方法,將疊堆型壓電驅動器的非線性電-機械耦合模型完全轉換到電氣域內,建立其非線性相似電路模型;給出了非線性相似電路模型中遲滯因子的辨識方法,并對某款商用疊堆型壓電驅動器進行了遲滯因子的辨識試驗;基于非線性相似電路模型和遲滯因子的辨識結果,對該款疊堆型壓電驅動器的非線性特性進行了仿真分析,得到了其非線性位移遲滯回線;仿真結果與試驗結果吻合,證明了該建模過程與辨識方法的正確性。該建模方法在電氣域內對疊堆型壓電驅動器電-機械耦合特性及非線性遲滯特性進行描述,建模過程物理意義清晰且簡單實用,對于研究壓電驅動器的動態特性及控制算法具有實際意義。
疊堆型壓電驅動器;非線性建模;遲滯因子;系統相似方法
壓電驅動器是近些年來得到迅速發展的新型電動驅動器,它利用壓電陶瓷的逆壓電效應將電能轉化為機械能,具有結構緊湊、定位精度高、響應快、輸出力大、無電磁干擾等優點,因此被廣泛應用于振動主動控制[1]、高頻伺服作動系統[2]以及航天器微型冷氣推進系統[3]中。然而,其輸出位移過小的缺點嚴重限制了其應用范圍。為了獲得可用的位移輸出,一般需要對壓電陶瓷的輸出位移進行放大,常用的放大方法包括壓電片堆疊、單晶片或雙晶片結構[4-6]。其中,堆疊型壓電驅動器具有更好的力學特性和動態特性,并且便于與放大機構聯合使用,成為目前最有效、最實用的壓電驅動器形式。
疊堆型壓電驅動器不但是一種典型的電-機械耦合系統,而且具有明顯的非線性遲滯特性。在早期的壓電驅動器建模研究中,為了簡化建模過程,大都忽略其非線性,只是線性化地研究了壓電驅動器的電-機械能量轉換過程。此類模型包括靜態模型、動力有限元模型和動力阻抗模型[7],但是以上三種模型均為純力學模型,對于考察壓電驅動器的電學特性具有明顯的不足。為了克服這一缺點,文獻[8]利用相似系統思想,建立了壓電驅動器的相似電路耦合模型,使得系統建模過程物理意義更加清晰,但是該模型同樣沒有考慮壓電驅動器的非線性遲滯特性。
隨著對壓電驅動器定位精度要求的提高,人們期望通過研究壓電驅動器的非線性遲滯特性,為壓電驅動器的控制算法提供更多的理論支撐,因此各國研究人員在分析其非線性遲滯特性成因的基礎上,提出了多種建模方法。比較典型的有Preisach模型[9]、Duhem模[10]、Maxwell滑動模型[11]以及Prandtle-Ishlinskii模型[12]。上述模型中所包括的參數一般都比較多,這給非線性模型的建立或辨識帶來了不便。為了能夠更加方便地描述壓電驅動器的非線性遲滯效應,Adriaens等[13]提出了一個只包含三個參數的一階微分方程,用它來描述這種非線性遲滯現象,并且給出了方程中三個參數的辨識方法。雖然文獻[9-13]給出了壓電驅動器非線性遲滯特性的不同表達形式,但是在電-機械耦合特性的理論分析方面,都是將壓電驅動器分解到兩個物理域內(電氣域和力學域)進行模型的建立,這種建模方式物理意義不清晰,無法直觀地理解壓電驅動器的能量傳遞過程。
本文根據系統相似方法,將疊堆型壓電驅動器的非線性電-機械耦合模型完全轉換到電氣域內,建立了其非線性相似電路模型;闡述了疊堆型壓電驅動器遲滯因子的辨識方法,并對某款商用疊堆型壓電驅動器進行了遲滯因子的辨識試驗;基于動態仿真框圖和辨識的遲滯因子,對疊堆型壓電驅動器的非線性特性進行了仿真分析,并與試驗結果進行了對比。該建模方法在電氣域上揭示了疊堆型壓電驅動器的電-機械耦合機理及非線性遲滯特性,使建模過程物理意義清晰,能夠直觀地理解壓電驅動器的能量傳遞過程。
1 典型疊堆型壓電驅動器的結構
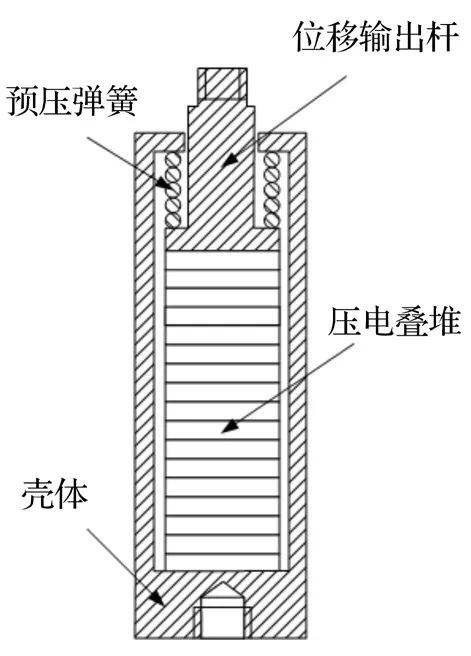
圖1 疊堆型壓電驅動器的結構示意圖Fig.1 Schematic of stack-type piezoelectric actuator
疊堆型壓電驅動器由很多壓電陶瓷片粘接而成,是一種機械上串聯、電氣上并聯的結構。這種壓電驅動器的優點是在低壓驅動情況下,能夠輸出較大的位移和力,同時頻率響應快。但是,這種壓電驅動器同時具有一個明顯的缺點是不能承受拉力,因為拉力會使粘接在一起的壓電疊片脫離,進而引起壓電驅動器斷裂。因此,為了使其在實際應用中具有較好的可靠性,一般是采用預壓彈簧給壓電疊堆提供一定的預壓縮力,這樣才能使得壓電驅動器能夠承受一定的拉力,提高其力學性能。此外,壓電疊堆的位移通過一個位移輸出桿輸出。所以,壓電疊堆、預壓彈簧和位移輸出桿就構成了典型的疊堆型壓電驅動器,如圖1所示。
2 疊堆型壓電驅動器的非線性動力學建模
2.1 非線性相似電路模型
壓電材料除了具有遲滯非線性之外,它本身還是一種具有電-機械耦合效應的材料。Goldfarb等[11]給出了一種描述壓電疊堆電-機械耦合行為的方法。基于Goldfarb的理論,建立了疊堆型壓電驅動器的電-機械耦合模型,如圖2所示。
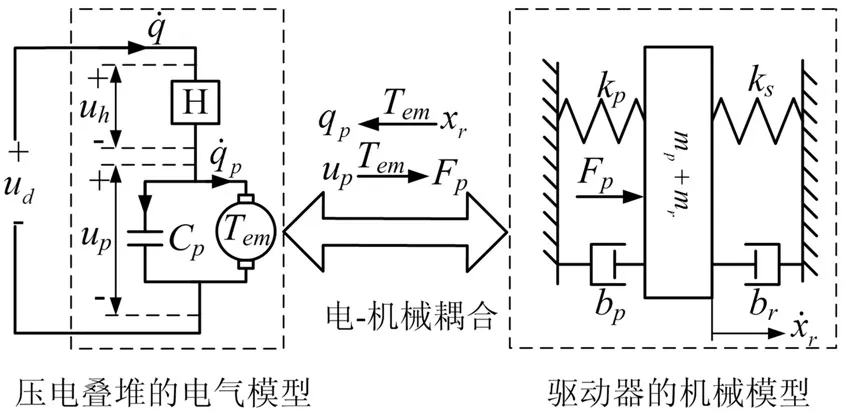
圖2 疊堆型壓電驅動器的電-機械耦合模型Fig.2 Electromechanical coupling model of stack-type piezoelectric actuator

圖2所示的疊堆型壓電驅動器的電-機械耦合模型,是在電氣和機械兩個物理域內對壓電驅動器進行了模型的描述。為了使壓電驅動器的模型描述過程物理意義清晰,下面利用相似系統思想,將整個壓電驅動器都在電氣域內進行描述,建立了疊堆型壓電驅動器的非線性相似電路模型。
根據線性系統微分方程的相似性,具有不同物理含義的線性系統均具有自己的等效電路模型,這被稱作“系統相似方法”[14]。表1給出了機械系統物理量與電氣系統物理量的相似性對比。
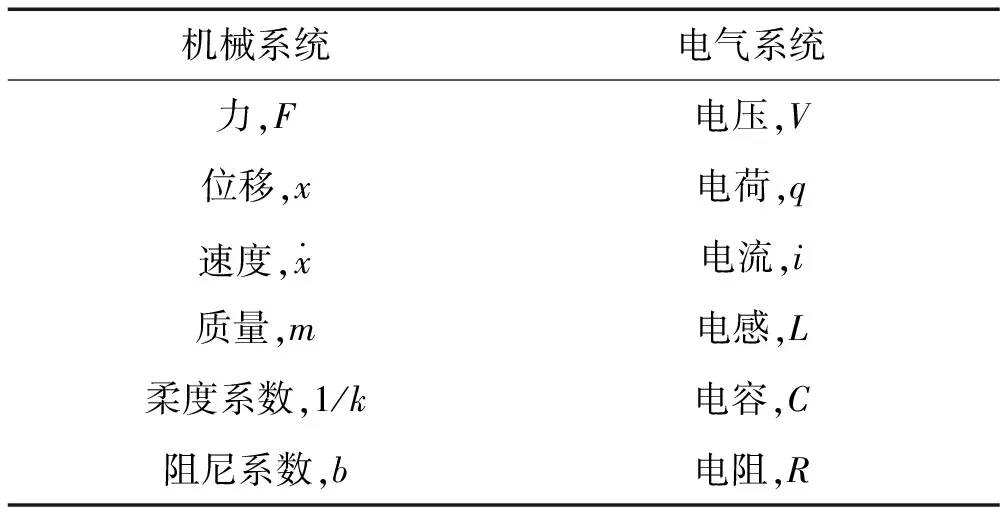
表1 機械系統與電氣系統的相似轉換
基于機械系統與電氣系統的相似方法,將如圖2所示的疊堆型壓電驅動器的電-機械耦合模型在電氣域內進行描述,得到了如圖3所示的疊堆型壓電驅動器的非線性相似電路模型。圖3完全從電路的角度來解釋疊堆型壓電驅動器的電-機械耦合特性,使得驅動器機理描述更加清晰,這有利于更加直觀地詮釋疊堆型壓電驅動器的能量流,也能更加方便地建立疊堆型壓電驅動器的狀態方程。
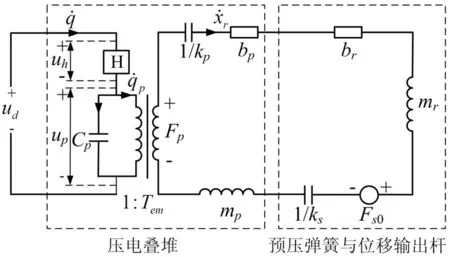
圖3 疊堆型壓電驅動器的非線性相似電路模型Fig.3 Nonlinear simulative circuit model of stack-type piezoelectric actuator

參考圖3,可以得到疊堆型壓電驅動器的非線性動力學方程:
ud=uh+up
(1)
q=H(uh)
(2)
up=Fp/Tem
(3)
q=qp+Cpup
(4)
qp=Temxr
(5)
(6)
其中:H代表疊堆型壓電驅動器的遲滯因子,也是表征壓電驅動器非線性的參數。
此外,壓電疊堆的等效剛度系數kp可表示為[15]:
kp=EpAp/lp
(7)
其中:Ep為壓電疊堆的楊氏模量,Ap為壓電疊堆的截面積,lp為壓電疊堆的長度。
壓電疊堆的質量mp可表示為:
mp=ρpAplp
(8)
其中:ρp為壓電疊堆的密度。
電-機械轉換系數Tem可由下式表示[15]:
Tem=d33npkp
(9)
其中:d33為壓電陶瓷的應變常數,np為壓電疊片的數量。
基于式(1)~式(6)的非線性動力學模型,建立了疊堆型壓電驅動器的動態框圖,如圖4所示。該動態框圖包含了遲滯非線性、電-機械耦合特性和位移輸出桿動特性等因素,直觀地解釋了疊堆型壓電驅動器的工作機理。其中,G(s)是代表位移輸出桿動特性的傳遞函數,它是由式(6)推導而來的,可以表示如下:
(10)
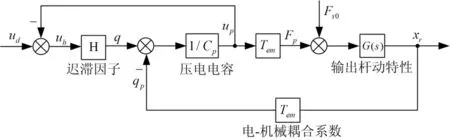
圖4 疊堆型壓電驅動器的動態框圖Fig.4 Dynamic diagram of stack-type piezoelectric actuator
2.2 遲滯因子的辨識方法
遲滯現象是壓電材料的一種固有特性,它的存在會影響壓電驅動器的性能。很多學者[9-12]都對壓電材料的遲滯非線性進行過研究,并提出了很多能夠描述這種特性的數學模型。為了能夠更加方便地描述壓電陶瓷驅動器的遲滯效應,本文采用Adriaens等[13]所提出的一階微分方程來描述這種現象,并且給出了方程中三個參數的辨識方法。Adriaens所提出的一階微分方程表示為:
(11)
根據文獻[13],為了辨識式(9)中的三個參數,首先應該得到遲滯現象引起的電壓uh和電荷q之間的非線性曲線。但對于疊堆型壓電驅動器,uh與q之間的曲線不容易測得,而容易測得的是其位移xr與驅動電壓ud之間的非線性遲滯曲線。
下面我們將利用已知的xr與ud之間的遲滯關系推導得到辨識所需要的uh和q之間的遲滯關系。
聯立式(3)~(5),可以得到
(12)
(13)
假設壓電驅動器處于空載情況下,則Fp可以表示如下:
Fp=kpxr
(14)
將式(12)代入到式(10)和式(11)中,可得:
(15)
(16)
結合式(15),式(16)以及(xr,ud)曲線,可以獲得uh和q之間的非線性遲滯曲線。
[13],由(uh,q)遲滯曲線的中心點位置、平均斜率和遲滯曲線面積,可以得到式(11)中的三個參數,表示如下:
(17)
(18)
(19)
其中:qur和qll分別為(uh,q)遲滯曲線的右上端點和左下端點所對應的電量值,qc為(uh,q)遲滯曲線的中心點對應的電量值,A為uh的幅值,ε為遲滯環的面積。
3 疊堆型壓電驅動器遲滯因子的辨識實驗
本文所使用的疊堆型壓電驅動器是德國Physik Instrumente公司的產品,型號是P-843.40,內置應變計傳感器(SGS,Strain Gauge Sensor);高精度的SGS用來測量疊堆型壓電驅動器的位移。該疊堆型壓電陶瓷驅動器的物理參數列在了表2中。
首先對P-843.40型壓電驅動器的準靜態性能(位移與驅動電壓的關系)進行了測試,測試裝置如圖5所示。信號發生器產生頻率為0.05 Hz、幅值為5 V、偏置5 V的三角波信號(如圖6所示),這個信號通過Physik Instrumente公司壓電功率放大器(由E501.00型機箱外殼和E504.00F型功率放大模塊組成)放大之后,形成壓電驅動器的驅動電壓。位移信號通過SGS獲得,位移信號和信號發生器產生的三角波信號都通過信號調理箱進入工控機,這兩個信號都由工控機中的Advantech PCI1716型A/D板卡采集。經過簡單地數據處理之后,就可獲得壓電陶瓷驅動器的位移xr與其驅動電壓ud之間的關系曲線,如圖6所示。
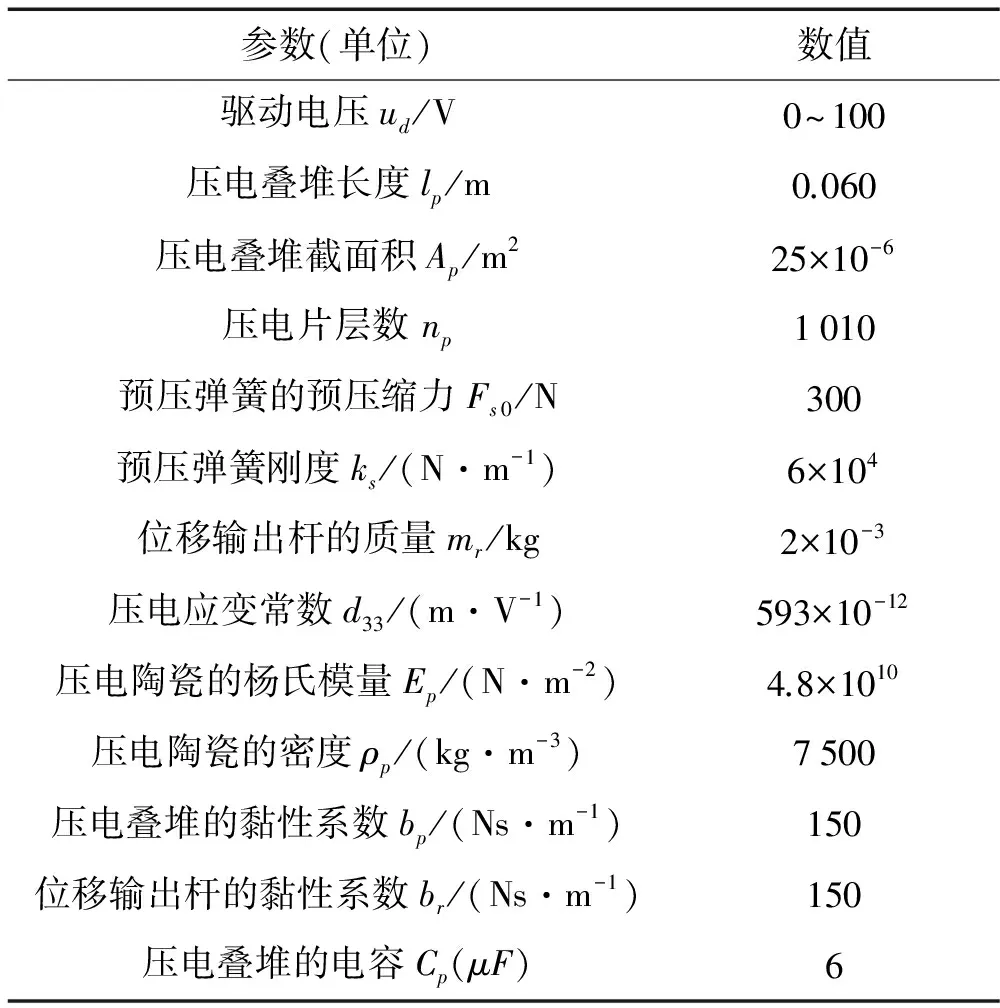
表2 P-843.40型壓電驅動器的參數
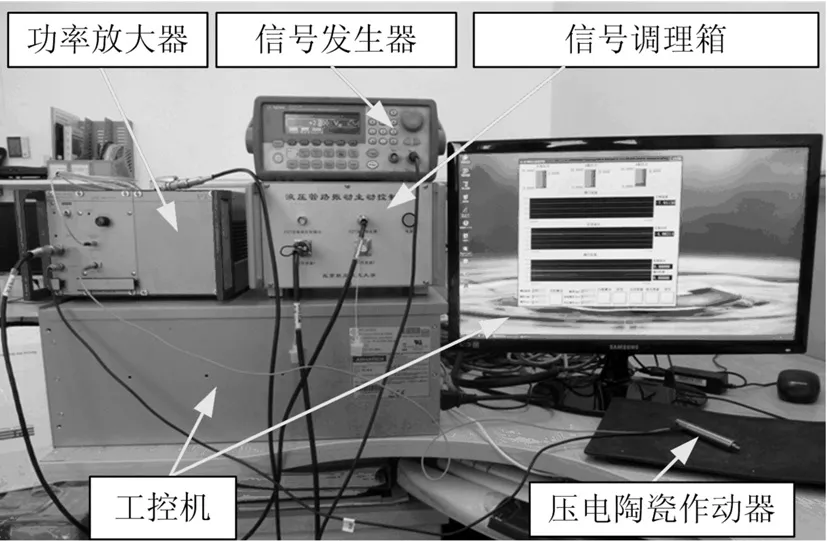
圖5 壓電驅動器位移測量裝置Fig.5 Displacement measuring equipment of stack-type piezoelectric actuator
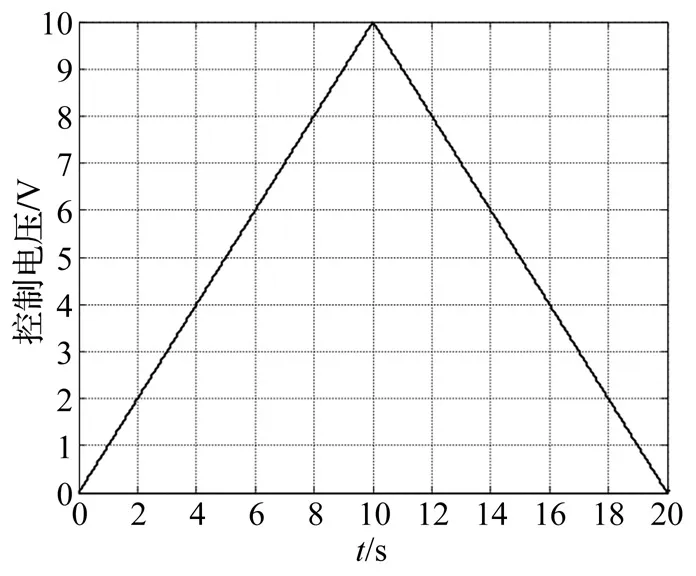
圖6 三角波控制電壓Fig. 6 Triangle control voltage
根據式(15)~式(16)以及圖7,可以獲得遲滯現象引起的電壓uh和電荷q之間的非線性曲線,如圖8所示。
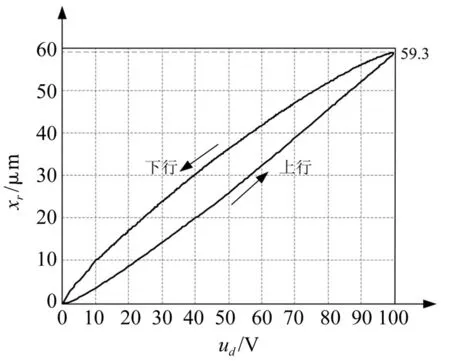
圖7 測得的壓電驅動器位移與驅動電壓的關系曲線Fig.7 Measured relationship between drive voltage and displacement of piezoelectric actuator
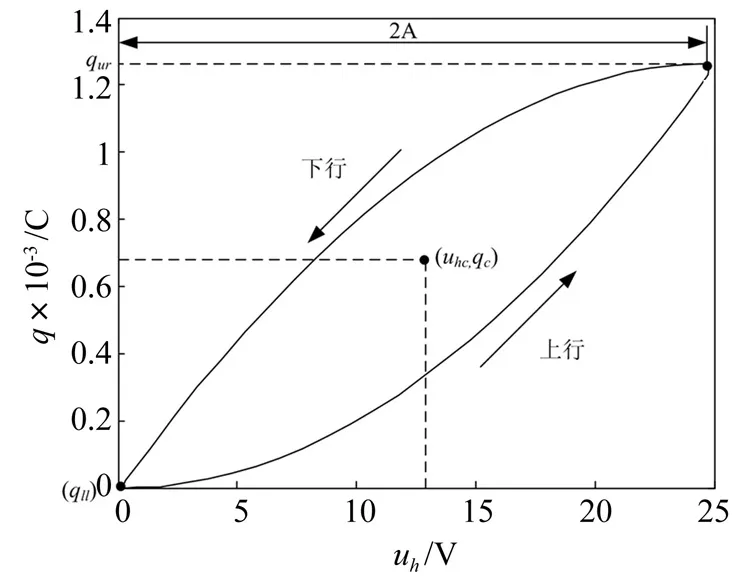
圖8 計算得到的(uh, q)遲滯曲線Fig.8 Calculated hysteresis curve between uh and q
式(17)~式(19)方程右側的參數可以通過圖8所示的遲滯曲線得到,這樣就得到所要辨識的三個參數(如表3所示)。將辨識參數代入到式(11)中,就得到了本文疊堆型壓電驅動器的遲滯因子表達式。
4 仿真分析與結果討論
在完成了遲滯因子H辨識之后,便可利用如圖4所示的疊堆型壓電驅動器的動態框圖,對其動態特性進行仿真分析。仿真參數見表3。

表3 P-843.40型壓電驅動器遲滯因子的辨識參數
為了便于將仿真結果與試驗結果進行對比分析,仿真過程中的控制電壓同樣采用如圖6所示的0.05 Hz、幅值為5 V、偏置為5 V的三角波信號。在此驅動電壓下,壓電驅動器的位移仿真曲線如圖9(虛線)所示。同時,利用圖5所示的試驗裝置測得了該壓電驅動器在三角波驅動電壓下的輸出位移,并將其也繪制在了圖9中(實線)。從圖9可以看出,壓電驅動器在三角波指令下的位移輸出具有明顯的非線性特征,這便是遲滯現象;此外,仿真曲線與試驗曲線能夠基本的吻合,這就驗證了本文所提出的建模方法和辨識方法的正確性。
為了比較壓電驅動器遲滯回線的仿真結果和試驗結果,將驅動電壓ud和輸出位移xr之間非線性關系的仿真曲線和試驗曲線均繪制在了圖10中。通過圖10可以看出,仿真與試驗測得的遲滯回線能夠基本吻合,這再次證明了本文所提出的疊堆型壓電驅動器的建模方法和遲滯因子的辨識試驗的正確性。

圖9 三角波指令下驅動器的位移輸出Fig.9 Displacement output under triangle command signal
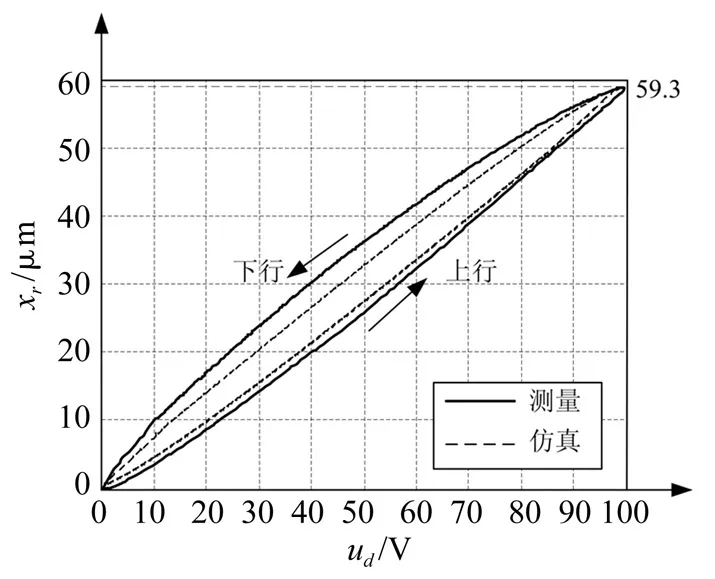
圖10 位移遲滯回線的仿真結果與試驗結果對比Fig.10 Comparison between simulated and experimental displacement hysteresis curve
5 結 論
本文根據系統相似方法,通過在電氣域內描述電-機械耦合特性和非線性遲滯特性,建立了疊堆型壓電驅動器的非線性相似電路模型;通過對某型商用疊堆型壓電驅動器的試驗研究,驗證了該模型的有效性;本文提出的建模方法;具有建模過程簡單實用且物理意義明顯的優點,對于研究壓電驅動器的動態特性和控制算法具有實際意義。
參 考 文 獻
[1] Jiao Z, Chen P, Hua Q, et al. Adaptive vibration active control of fluid pressure pulsations [J]. Proceeding of the Institution of Mechanical Engineers, Part I: Journal of System and Control Engineering, 2003, 217: 311-318.
[2] Anderson E H, Evert M E, Flannery P, et al. Image stabilization testbed (ISTAT) [C]. SPIE conference on technologies for synthetic environment: hardware-in-the-loop testing VI, Orlando, FL, 16 April 2001, paper no.4366-24.
[3] Matticari G, Noci G E, Siciliano P. Cold gas micro propulsion prototype for very fine spacecraft attitude/position control [C]. 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Sacramento, USA, 2006:5378-5390.
[4] Chopra I. Review of state of art of smart structures and integrated systerns [J]. AIAA Joumal, 2002, 40(11): 2145-2187.
[5] 吳博達, 鄂世舉, 楊志剛, 等. 壓電驅動與控制技術的發展與應用 [J]. 機械工程學報, 2003, 39(10):79-85. WU Bo-da, E Shi-ju, YANG Zhi-gang, et al. Development and application of piezoelectric actuation and control [J]. Chinese Journal of Mechanical Engineering, 2003,39(10):79-85.
[6] 趙淳生. 超聲電機技術與應用 [M]. 北京: 科學出版社, 2007.
[7] Liang C, Sun F P, Rogers C A. An impedance method for dynamic analysis of active materials systems [J]. Journal of Intelligent Material Systems and Structures, 1997, 8: 718-732.
[8] 李國清, 胡元太, 胡鵬, 等. 相似電路耦合模型及其在壓電-梁結構分析中的應用 [J]. 固體力學學報, 1999, 20 (4): 343-348. LI Guo-qing, HU Yuan-tai, HU Peng, et al. A simulative circuit model for intelligent structures and its application to a smart beam with PZT actuator [J]. Acta Mechanica Solida Sinica, 1999, 20 (4): 343-348.
[9] Ge P, Jouaneh M. Generalized preisach model for hysteresis nonlinearity of piezoceramic actuators [J]. Precision Engineering, 1997, 20(2): 99-111.
[10] Stepanenko Y, Su C Y. Intelligent control of piezoelectric actuators [C]. 37th IEEE Conference on Decision and Control, Victoria University, BC, 1998: 4234-4239.
[11] Goldfarb M, Celanovic N. A lumped parameter electromechanical model for describing the nonlinear behavior of piezoelectric actuators [J]. Journal of Dynamic Systems, Measurement, and Control, 1997(119): 478-485.
[12] Sch?fer J, Janocha H. Compensation of hysteresis in solid-state actuators [J]. Sensors and Actuators A: Physical, 1995, 49(1): 97-102.
[13] Adriaens H, De Koning W L, Banning R. Modeling piezoelectric actuators [J]. IEEE/ASME Transactions on Mechatronics, 2000, 5(4): 331-341.
[14] Cheng D K. Analysis of linear systems [M]. New Jersey: Addison-Wesley, 1959.
[15] Mayer D, Atzrodt H, Herold S, et al. An approach for the model based monitoring of piezoelectric actuators [J]. Computers & Structures, 2008, 86(3): 314-321.
勘誤聲明
王世明,劉雨,任順清. 試驗環境條件對離心機穩定性影響分析,2014,33(20):187-191。該文章內容為作者王世明在哈爾濱工業大學讀博期間完成的工作,知識產權歸哈爾濱工業大學所有,而不屬于天津科技大學,作者本人為此失誤負責,同時也對哈爾濱工業大學及振動與沖擊雜志社表示歉意。在此聲明該文章第一作者單位更改為哈爾濱工業大學。
Nonlinear dynamic modeling and experiment of stack-type piezoelectric actuator based on system similarity method
GUAN Chang-bin1, CHEN Jun1, WANG Xu-dong1, JIAO Zong-xia2
(1. Beijing Institute of Control Engineering, Beijing 100080, China;2. School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China)
According to the method of similarity between mechanical system and electrical system, a nonlinear circuit model of stack-type piezoelectric actuator was established by transforming its electromechanical coupling model to a pure electrical one. The identification method for the hysteresis factor in the nonlinear circuit model was given out and the identification experiments on a commercial stack-type piezoelectric actuator were carried out. Based on the established nonlinear circuit model and the identified hysteresis factor, the nonlinear dynamic characteristics of the piezoelectric actuator were simulated. The simulated hysteresis curve agrees well with the experiment result which verifies the theory. The proposed model can describe the electromechanical coupling characteristics and nonlinear hysteresis characteristics of stack-type piezoelectric actuator in electrical domain with obvious physical sense. The results are of practical significance to study the dynamic characteristics and control algorithm of stack-type piezoelectric actuators.
stack-type piezoelectric actuator; nonlinear modeling; hysteresis factor; system similarity method
民用航天十二五項目
2013-11-01 修改稿收到日期:2014-03-03
官長斌 男,博士,工程師,1984年9月生
陳君 男,高級工程師,碩士生導師,1978年生
TB318
A
10.13465/j.cnki.jvs.2015.09.003
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
電腦報(2020年35期)2020-09-17 13:25:53
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
