基于CAN總線的智能傳感器節點設計與應用*
2015-03-11 03:17:48杜華程許同樂黃湘俊楊艷輝
傳感器與微系統 2015年2期
杜華程, 許同樂, 黃湘俊, 楊艷輝
(1.山東理工大學 機械工程學院,山東 淄博 255049;2.長沙木年輪電子科技有限公司,湖南 長沙 410013)
基于CAN總線的智能傳感器節點設計與應用*
杜華程1, 許同樂1, 黃湘俊1, 楊艷輝2
(1.山東理工大學 機械工程學院,山東 淄博 255049;2.長沙木年輪電子科技有限公司,湖南 長沙 410013)
針對基于RS—485總線的巖土工程數據采集系統實時性差、可靠性與錯誤檢測能力低的問題,設計了基于CAN總線的智能傳感器節點與巖土工程監測系統通信。詳述了智能傳感器節點硬件和軟件設計。通過對基于CAN節點的位移計在工程安全監測上的應用,結果表明:基于CAN總線智能傳感器節點具有工作穩定、性能可靠、精度高等特點。
CAN總線; 傳感器節點; 智能節點; 巖土工程
0 引 言
目前,國內巖土工程自動化安全監測系統數據通信中,現場總線采用較多的是RS—485工業總線,其效率低、實時性差、可靠性低、維護成本高等[1]。而巖土工程監測要求抗干擾性強、多節點、長距離傳輸,基于RS—485總線的數據采集系統難以滿足要求,CAN總線在通信能力、可靠性、靈活性、成本低等方面相較于RS—485有著明顯的優勢。
本文采用CAN總線代替RS—485總線,設計研發基于CAN總線的巖土工程自動化監測智能節點,實現巖土工程監測中長距離、多點、及時性強等特征,可以有效解決目前巖土工程監測中的這些問題,減少建設工程存在的安全隱患[2]。
1 智能節點硬件設計
1.1 系統組成
基于CAN總線的數字式傳感器網絡節點具有統一的工業總線接口,多只傳感器可以一起以CAN總線方式連接,并可以直接與PC連接或者通過數據采集箱與計算機相連,從而進行實時監測與自動化測量。本文設計的節點是由帶有CAN控制器的微處理器和CAN收發器芯片等組成的智能節點,本智能節點主要由核心微處理器LPC11C14、模擬信號采集前端電路、CAN總線電路、溫度傳感器電路、實時時鐘電路,以及EEPROM存儲器電路等組成。基于CAN總線的傳感器智能節點如圖1所示。
1.2 硬件設計
1.2.1 微處理器
微處理器是系統的核心,負責數據采集處理、記錄采集數據、通過CAN總線上傳數據或接收并處理管理中心發出的控制命令等任務,根據系統采用小體積、低功耗設計的要求,選用基于Cotex-M0內核的32位微處理器LPC11C14,單片機本身就集成CAN控制器,內部ROM集成供CAN和CAN Open標準使用的初始化和通信的API函數,用戶可直接調用。具有32 kB片內Flash程序存儲器 ,具備±1LSB DNL的8通道高精度10位ADC,可選擇通過CAN或UART接口進行Flash ISP編程等。
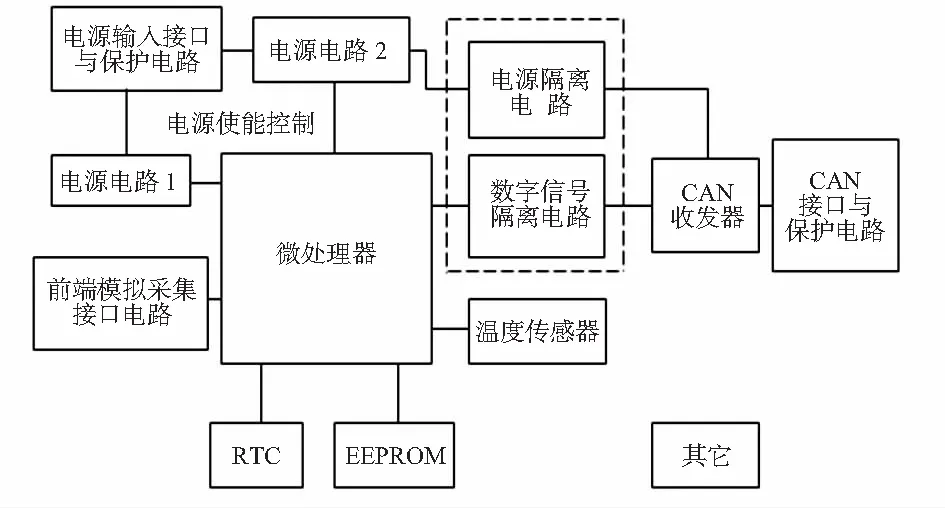
圖1 硬件組成框圖
1.2.2 CAN總線模塊
CAN總線信號CANTX和CANRX從C8051F040出來后先分別經過數字隔離電路進行電氣隔離,再經過具有高EMC性能CAN總線收發器接口芯片TJA1040,然后接到CAN數據線上[3]。由于巖土工程現場環境惡劣,電磁干擾等比較嚴重,為了保證系統的可靠性,節點的控制器和接收器之間采用雙路高速磁隔離器ADUM3201數字隔離,避免總線上的瞬時干擾。在數字隔離和CAN收發器的電源之間選用的DC-DC電源模塊ZY0505BS-1W進行電源隔離,提高節點的穩定性與安全性。為了進一步確保采集系統的抗干擾能力和驅動能力抗干擾性能,在CAN總線上串聯保險絲SDM020,并聯電容器濾除總線上高頻干擾,也有防電磁輻射的功能,在地與總線接入端接入保護二極管,可以起到過壓保護作用[4]。其電路原理圖如圖2所示。

圖2 CAN總線模塊電路原理圖
1.2.3 溫度補償模塊
由于熱脹冷縮效應,在同樣的物理量(壓力、拉力、應變、位移等)作用于傳感器的情況下,溫度不同時傳感器輸出的頻率也會發生變化。如果不采取補償處理,就會影響傳感器的測量精度,降低了傳感器的長期穩定性[5]。因此,設計基于DS18B20數字溫度實時檢測模塊進行溫度補償,在進行測量讀出傳感器的頻率后,根據當前的溫度將頻率值換算至標定時的溫度值對應的頻率值,再根據標定的結果換算成物理量,從而提高測量精度。其電路原理圖如圖3所示。
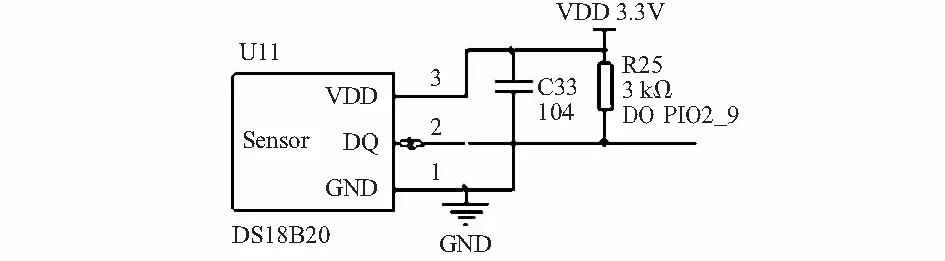
圖3 溫度補償模塊電路原理圖
2 軟件設計
軟件設計的整體流程如下圖4所示,系統在上電后,先進行初始化。基于低功耗的考慮,主控制器MCU LPC11C14在初始化CAN后,將所有IO,MCU的片內外設以及片外的傳感器設備進入低功耗或掉電模式狀態,然后將自身設置進入休眠模式。通過傳感器內部RTC定時喚醒MCU,主機可通過CAN向傳感器發送指定的操作命令,MCU在接收到主機傳送的命令字之后,進行相應的操作,比如:采集當前溫度、頻率信息,并根據需要寫入EEPROM或通過CAN 總線將數據返回給遠程主機,實現先進的工業化、自動化數據采集功能。
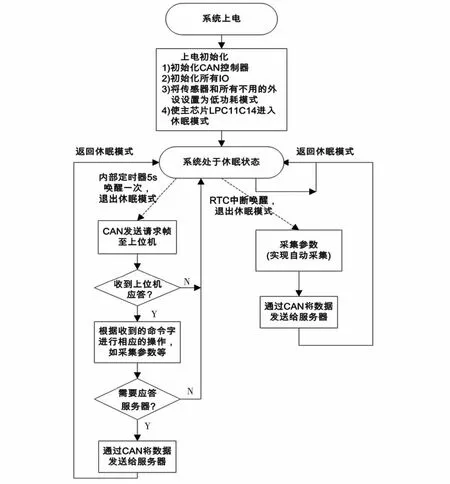
圖4 整體流程圖
3 工程應用分析
將節點應用于某煤礦的采空區自動化監測工程中,通過多個CAN總線智能節點與PC進行連網,組成頂底板移近量在線監測系統,在準備充填的某采面根據采空區內部情況和井上居民區分布情況選擇頂底板移近量監測點,每個測點布置一個基于CAN節點的頂底板移近量傳感器。各個傳感器與接線盒相連接的信號傳輸總線把每個測點采集的數據傳入自動采集箱,視傳輸信號的強弱在傳輸總線中加入CAN中繼器。當自動采集箱收到監測服務器(計算機)的巡測指令或到預先設置的自動采集時間時,自動采集箱通過CAN總線實時采集移近量和溫度值,并將數據發送到監測服務器,由工作人員進行數據分析。圖6、圖7分別為測點1在2013年7月10日~9月10日期間采空區填充時前后溫度變化和頂底板移近量變化。
在實際工程應用中,智能傳感器節點數據采集和傳輸順暢,沒有出現數據滯后和混亂報錯現象,采空區填充時,從測點1采集的溫度變化圖5與頂底板移近量變化圖6可以得知,填充前后測點檢測溫度最高位47.7 ℃,這與實驗室填充物反應時的最高溫度相近;頂底板移近量總的變化量為31.1 mm,與預想變化相符,這說明基于CAN總線的智能傳感器節點在數據采集和傳輸方面具有監測準確、可靠性高、數據采集效率高等特點。
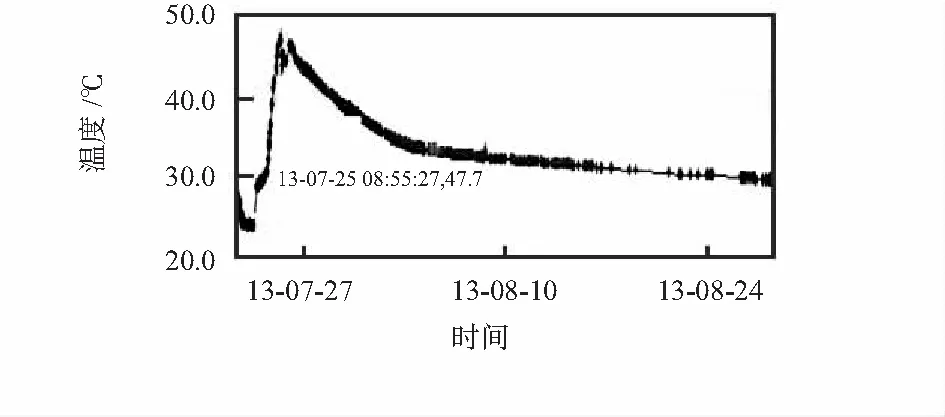
圖5 溫度變化
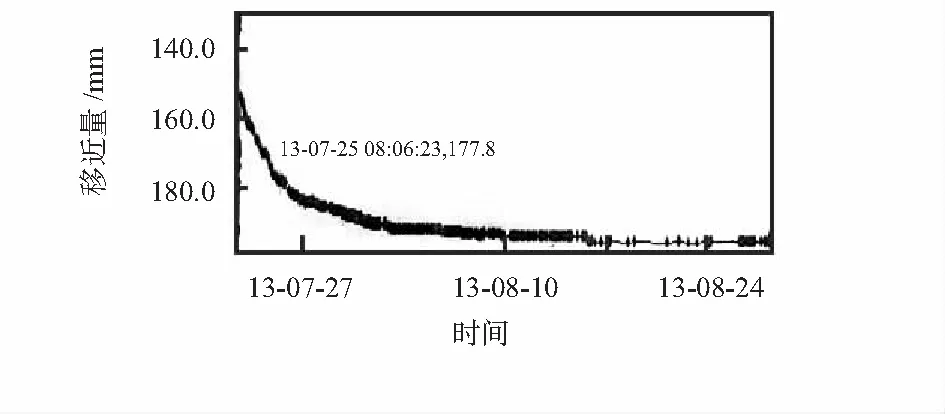
圖6 頂底板移近量變化
4 結 論
1)在巖土工程自動化監測智能傳感器節點的設計中,采用模塊化設計,其體積小、功耗低、自動化程度高,方便攜帶安裝;采用溫度自動補償技術,提高了數據采集的準確度。傳感器節點作為下位機可定時測量,可主動請求上位機發送數據可省去中間環節。
2)采用CAN總線技術,可以提高網絡各節點之間的數據通信實時性和可靠性,增強系統的靈活性與穩定性,保證巖土工程的監測工作的準確性與效率。
3)在實際工程中,該節點能夠滿足快速、可靠、多種測量環境下的傳感器數據采集與傳輸,降低了相關監測與管理成本,說明該智能節點有著廣泛的應用價值。
[1] 楊 旗,陸云龍.基于CAN總線的傳感器網絡節點設計[J].儀器技術與傳感器,2011(9):95-96.
[2] 孫樹文,楊建武,張慧慧,等.基于CAN 總線的分布式監控系統智能節點設計[J].微計算機信息,2006,22(2-8):55-57.
[3] 張 弘,于盛林.基于C8051F040的CAN總線傳感器數據采集模塊設計[J].測控技術,2007,26(6):62-64.
[4] 牛躍聽,周立功,方 丹,等.CAN總線嵌入式開發——從入門到實踐[M].北京:北京航空航天大學出版社,2012.
[5] 李 強,梁 莉,劉 楨,等.具有溫度補償功能的智能壓力傳感器系統[J].儀器儀表學報,2008,29(9):1934-1938.
Design and application of intelligent sensor nodebased on CAN bus*
DU Hua-cheng1, XU Tong-le1, HUANG Xiang-jun1, YANG Yan-hui2
(1.School of Mechanical Engineering,Shandong University of Technology,Zibo 255049,China; 2.Changsha Wooden Rings Electronic Technology Company,Changsha 410013,China)
Aiming at problem of poor real-time,low reliability,low error detection ability of geotechnical engineering data acquisition system based on RS—485 bus,intelligent sensor node based on CAN bus is designed and communicate with geotechnical engineering monitoring system.Mainly introduce design of hardware and software of intelligent sensor node.By means of application of displacement meter based on CAN node in engineering safety monitoring, results show that the intelligent sensor node has characteristics of stable working,reliable property,and high precision.
CAN bus; sensor node; intelligent node; geotechnical engineering
2014—07—02
山東省高等學校科技計劃資助項目(J10LG22);山東省自然科學基金資助項目(ZR2013FM005)
10.13873/J.1000—9787(2015)02—0082—03
TP 212
B
1000—9787(2015)02—0082—03
杜華程(1989-),男,山東濰坊人,碩士研究生,主要從事智能測試技術與儀器方面的研究。
猜你喜歡
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
太空探索(2016年6期)2016-07-10 12:09:06
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
筑路機械與施工機械化(2015年8期)2015-01-11 09:24:54
筑路機械與施工機械化(2014年4期)2014-03-01 02:58:34
