基于次錨節點的無線傳感器網絡改進加權質心定位算法
2015-03-26 07:59:56張先超劉興長張春園
傳感器與微系統 2015年2期
張先超,劉興長,張春園
(后勤工程學院 后勤信息與軍事物流工程系,重慶401311)
0 引 言
無線傳感器網絡(wireless sensor networks,WSNs)是由隨機部署在目標區域內的數量巨大的離散傳感器節點組成,通過無線通信方式形成的一個多跳的自組織網絡系統[1]。節點的位置信息對無線傳感器網絡十分重要,是其支撐技術,并且具有廣泛的應用[2]。研究提高定位精度是當前無線傳感器網絡研究的熱點[3~7]。
無線傳感器網絡的定位技術可分為兩類:基于測距(range-based)的技術和無需測距(range-free)的技術[8]。到達時間差(time difference of arrival,TDOA)測距技術廣泛應用于無線傳感器網絡定位,在不考慮非視距(NLOS)誤差的情況下可取得較高的測距精度[9]。基于TDOA 測距的粒子群優化(PSO)無線傳感器網絡定位算法可比較準確地估計節點位置,但需要額外測距設備,增加了節點能耗。基于接收信號強度指示(RSSI)的加權質心算法通信開銷小,算法簡單[10],但定位覆蓋率和定位精度受錨節點數目影響較大。
本文提出了一種基于次錨節點的改進加權質心定位算法(IWCLA-SAN),以克服加權質心定位算法(WCLA)對錨節點數量要求較高和定位精度較低的缺陷。
1 粒子群優化定位算法
文獻[11,12]將粒子群優化算法應用于無線傳感器網絡定位中,驗證了該定位算法的可靠性。粒子群優化算法的實現原理如下:
假設在D 維的搜索空間內,存在一個種群大小為M 的粒子群,即無線傳感器網絡中的錨節點;存在一個數量為N的搜索目標群,即無線傳感器網絡中的未知節點。每個粒子在空間中的位置坐標xi=(xi1,xi2,…,xid),搜索速度vi=(vi1,vi2,…,vid),搜索到的個體最優位置為pi=(pi1,pi2,…,pid),搜索到的全局最優位置為gb=(gb1,gb2,…,gbd),其中,i=1,2,…,M,d=1,2,…,D。該算法采用下列公式對粒子操作

學習因子c1和c2是非負的常數,常設c1=c2=2;r1和r2是介于[0,1]的隨機數;w 為慣性權重,用來保持局部搜索和全局搜索的平衡,較大的w 有利于算法的全局搜索能力,較小的w 有利于算法的局部搜索能力;vid∈[-vmax,vmax],vmax太大容易使粒子飛離最優解,vmax太小容易使粒子陷入局部最優,粒子的速度通常設為每維變換范圍的10%~20%;k 為當前迭代次數,T 為終止迭代次數;f 為適應度函數,di為未知節點到各錨節點的距離;錨節點的坐標Ai(xi,yi),未知節點坐標Nj(xj,yj),其中,i=1,2,…,M,j=1,2,…,N。
2 測距原理與質心定位算法
2.1 RSSI 測距原理
節點在通信時可以直接獲取RSSI 值,估計出未知節點與錨節點的距離。針對室外定位環境,文中采用自由空間傳播模型(free space propagation model)和對數—常態分布(log-normal distribution)模型,用于分析和仿真[13]。自由空間模型無線信道的數學模型如下

對數—常態分布模型無線信道的數學模型如下

式中 PL(d0)為距離錨節點d0處的信號強度;PL(d)為距離錨節點d 處的信號強度;d 為未知節點與錨節點之間的距離;f 為頻率;d0為參考距離,一般取為1 m,將d=1 m 代入式(6)得到Loss,即PL(d0)的值;n 為信道衰減指數,一般取值2~4;Xδ為均值為零、方差δ 的高斯隨機噪聲變量。
通常情況下,測距誤差隨著測量距離的增加而增大[14],即較大的RSSI 值計算得到的距離值誤差較小,而較小的RSSI 值計算得到的距離值誤差較大。
2.2 質心定位算法


圖1 CLA 示意圖Fig 1 Schematic diagram of centroid localization algorithm
2.3 WCLA
WCLA 通過對不同的錨節點賦予不同權值,達到了提高定位精度的目的。通常加權值是未知節點到錨節點距離的函數[15],一般將未知節點與錨節點距離的倒數作為加權值,得到加權質心定位算法,其計算公式為
式中 (xi,yi)為錨節點的坐標,wi為加權因子,di為未知節點到錨節點的距離,i=1,2,…,n。
2.4 IWCLA
為了更加體現未知節點到通信范圍各錨節點距離對定位精度的影響,提出一種修正系數不固定的IWCLA。該算法對加權因子進行改進,設其為

其中,k 為修正系數,設定為
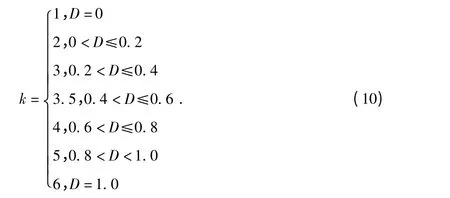
其中,D 為未知節點到通信范圍內錨節點距離集合元素方差的歸一化值,D 值的大小反映了未知節點通信范圍內各錨節點分布的均勻程度,分布越均勻D 值越小。根據D 值的不同設定k 的值,使得計算不同未知節點的坐標時,修正系數k 的值不同。如圖2 所示,對于錨節點分布均勻程度不同的兩種情況,圖2(a)的k 值大于圖2(b)的。本文根據通信范圍內各錨節點分布的均勻程度設定k 值,這樣更能增加距離未知節點較近的錨節點的權重,減少距離較遠的錨節點的權重。因此,與WCLA 相比,定位精度進一步提高。
2.5 IWCLA 描述
IWCLA 的定位步驟如下:
1)錨節點周期性發送自身節點ID 和自身節點位置信息,與鄰居節點進行通信。
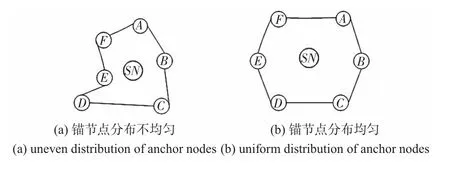
圖2 錨節點分布圖Fig 2 Diagram of anchor nodes distribution
2)未知節點收到錨節點信息后,分別記錄同一個錨節點的RSSI 均值。
3)根據公式(6)計算出未知節點到各錨節點的距離di。
4)當未知節點接收到的錨節點信息達到閾值N 時,建立以下3 個集合:
錨節點集合Sbeacon={a1,a2,…,an};錨節點位置集合Sposition={(x1,y1),(x2,y2),…,(xn,yn)};未知節點到錨節點的距離集合Sd={d1,d2,…,dn}。
5)對未知節點到錨節點的距離集合中的各元素按從小到大依次排序,組成新的集合;對應的新的錨節點位置集合。由2.1 節分析可知,距離值越小,測距越準確,故優選距離值較小的錨節點估計未知節點坐標,以提高定位精度。
7)根據公式(7)計算出未知節點的坐標(X,Y)。
2.6 仿真與分析
利用Matlab 軟件進行仿真。設錨節點數量為M,未知節點數量為N,錨節點和未知節點均隨機分布在室外100 m×100 m 的區域內;通信半徑r=30 m;信道衰減指數n=3.2,高斯隨機噪聲變量Xδ的標準差取為4,不考慮NLOS 誤差對定位結果的影響。
設錨節點數目為50,未知節點數目為20。圖3 為三種算法的定位誤差,對于大多數未知節點,IWCLA 的定位誤差明顯低于其它兩種CLA。
設定不同的錨節點個數,在每種錨節點個數情況下,獨立進行30 次實驗求出平均定位誤差。圖4 反映了三種定位算法平均定位誤差與錨節點數目關系。錨節點數目越多,三種定位算法的平均定位誤差越小,且IWCLA 定位效果始終優于另外二種定位算法。
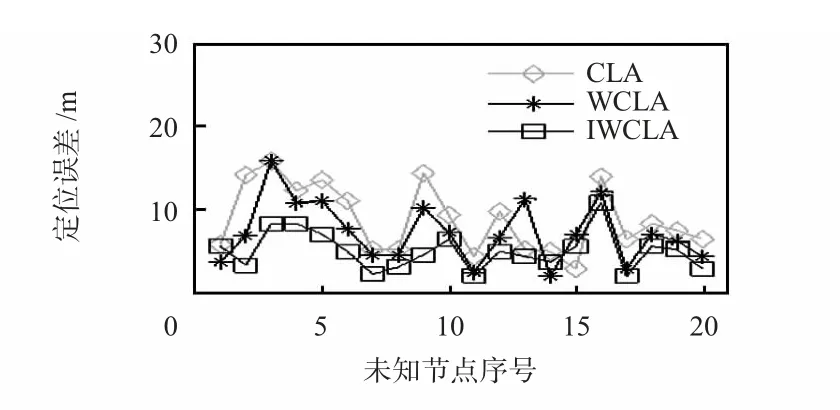
圖3 各未知節點的定位誤差Fig 3 Positioning error of each unknown node
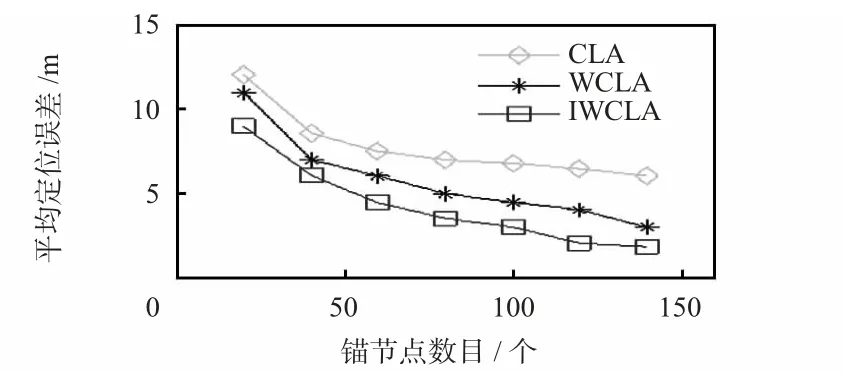
圖4 錨節點數目對定位精度的影響Fig 4 Influence of number of anchor node on positioning precision
3 IWCLA-SAN
3.1 算法描述
錨節點的數量對IWCLA 的定位精度和定位覆蓋率有很大影響,但帶有GPS 的錨節點造價是普通節點的10 倍,不適宜大規模部署。為了提高IWCLA 的定位精度和定位覆蓋率,本文將基于TDOA 測距的粒子群優化定位算法的未知節點升級為次錨節點(SAN),再采用IWCLA 對其它未知節點進行定位。
3.2 仿真與分析
設錨節點數量為M,SAN 數為R,未知節點數量為N,錨節點、SAN 和未知節點均隨機分布在室外100 m×100 m的區域內;通信半徑r=30 m;信道衰減指數n=3.2,高斯隨機噪聲變量Xδ的標準差取為4,不考慮NLOS 誤差對定位結果的影響。
在錨節點數目有限的情況下,研究加入SAN 對定位精度的影響。設錨節點數目依次為10,20,30,40,50;SAN 數目為20;未知節點數目為20。分別獨立進行30 次實驗,求出平均定位誤差和定位覆蓋率。由圖5、圖6 可知,IWCLASAN 與IWCLA 相比可以一定程度上提高定位精度和定位覆蓋率。盡管將未知節點升級為SAN 會帶來一定的誤差累積,但基于TDOA 測距的粒子群優化無線傳感器網絡定位算法具有較高定位精度,將其作為SAN 具有一定可靠度。
4 結束語
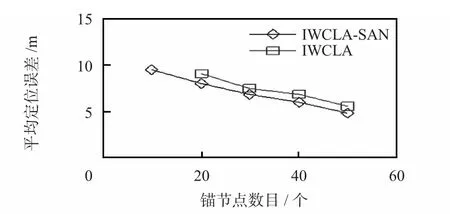
圖5 錨節點數目對定位精度的影響Fig 5 Influence of number of anchor node on positioning precision
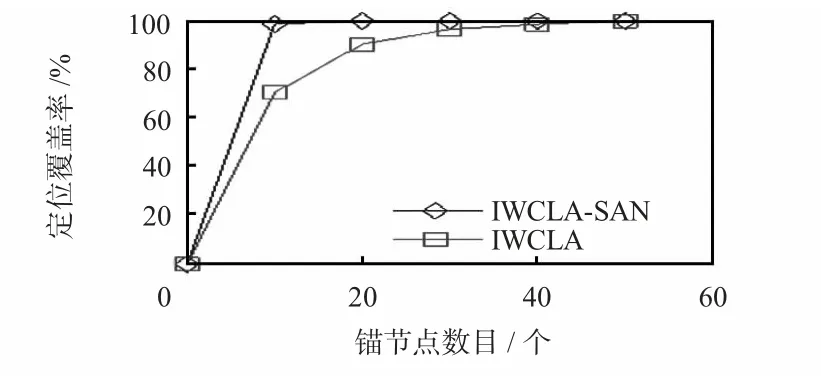
圖6 錨節點數目對定位覆蓋率的影響Fig 6 Influence of number of anchor node on localization coverage rate
本文針對定位精度較低的缺陷,在加權因子中引入了修正系數;針對CLA 對錨節點數量要求較高的缺陷,為減少錨節點數量,降低成本,將基于TDOA 測距的粒子群優化無線傳感器網絡定位算法的未知節點升級為SAN。本文提出的IWCLA 定位精度相較于WCLA 有較大提高;在錨節點數目有限的情況下,加入SAN 可以提高定位精度和定位覆蓋率。但本文并未考慮NLOS 誤差對定位精度的影響,這需進一步研究該算法在NLOS 環境中的可靠性。
[1] 宋 文,王 兵,周應兵,等.無線傳感器網絡技術與應用[M].北京:電子工業出版社,2007:1-10.
[2] 孫利民,李建中.無線傳感器網絡[M].北京:清華大學出版社,2005:135-154.
[3] Li F F,Luo F,Wang J X,et al.An effective self-adapting localization algorithm in wireless sensor networks[J].J of Applied Mechanics and Materials,2011,58-60:1013-1017.
[4] Jian L R,Zheng Y,Liu Y H.Beyond triangle inequality:Sifting noisy and outlier distance measurements for localization[C]∥Proc of IEEE INFOCOM 2010,San Diego:IEEE,2010:1-9.
[5] Kung H T,Lin C K,Lin T H,et al.Localization with snap-inducing shaped residuals:Coping with errors in measurement[C]∥Proc of MobiCom 2009,Beijing:ACM,2009:333-344.
[6] Li Z,Trappe W,Zhang Y,et al.Robust statistical methods for securing wireless localization in sensor networks[C]∥Proc of IPSN 2005,Los Angeles:IEEE,2005:91-98.
[7] Zhang Q X,Di Q L,Xu G Y,et al.A RSSI-based localization algorithm for multiple mobile robots[C]∥Proc of CMCE 10,Changchun:IEEE,2010:190-193.
[8] 李曉維,徐勇軍,任豐原.無線傳感器網絡技術[M].北京:北京理工大學出版社,2007:191-199.
[9] 彭 宇,王 丹.無線傳感器網絡定位技術綜述[J].電子測量與儀器學報,2011,25(5):389-399.
[10]方 震,趙 湛,郭 鵬,等.基于RSSI 測距分析[J].傳感技術學報,2007,20(11):2526-2530.
[11]王曉樂,徐家品.基于粒子群優化算法的WSNs 節點定位研究定位[J].計算機應用,2009,29(2):494-499.
[12]邢明彥,李臘元.粒子群優化算法在無線傳感器網絡中的應用[J].計算機工程與應用,2009,45(32):72-74.
[13]陳維克,李文鋒,首 珩,等.基于RSSI 的無線傳感器網絡加權質心算法定位[J].武漢理工大學學報,2006,30(2):265-268.
[14]Chen W,Mei T,Sun L,et al.Error analyzing for RSSI-based localization in wireless sensor networks[C]∥7th World Congress on Intelligent Control and Automation,WCICA 2008,IEEE,2008:2701-2706.
[15]楊新宇,孔慶茹,戴湘軍.一種改進的加權質心定位算法[J].西安交通大學學報,2010,44(8):1-4.
