一種匝道車輛匯入主干道安全性提示系統(tǒng)
2015-03-05 05:40:55楊鵬飛廣東省道路運(yùn)輸管理局廣東廣州510000
汽車實(shí)用技術(shù) 2015年10期
楊鵬飛(廣東省道路運(yùn)輸管理局,廣東 廣州 510000)
一種匝道車輛匯入主干道安全性提示系統(tǒng)
楊鵬飛
(廣東省道路運(yùn)輸管理局,廣東 廣州 510000)
摘 要:針對(duì)車輛經(jīng)匝道匯入主干道時(shí)容易與后方車輛發(fā)生碰撞事故,提出了一種匝道車輛匯入主干道安全性提示系統(tǒng)。該系統(tǒng)采用安裝在匝道口末端的毫米波雷達(dá)探測本車與周圍車輛之間的位置速度關(guān)系,用不同TTC值確定車輛匯入主干道的安全性等級(jí)。該系統(tǒng)可有效避免車輛進(jìn)入主干道時(shí)發(fā)生交通事故。
關(guān)鍵詞:匝道;毫米波雷達(dá);TTC值;提示系統(tǒng)
10.16638/j.cnki.1671-7988.2015.10.022
CLC NO.: U472.6 Document Code: B Article ID: 1671-7988(2015)10-57-03
引言
匝道是車輛從低速區(qū)進(jìn)入高速區(qū)的過渡路段,車輛經(jīng)匝道進(jìn)入主干道時(shí),駕駛員都需要從后視鏡或者車窗玻璃中獲取本車后方的交通信息,并做出安全性判斷,避免在匯入主干道時(shí)和后車發(fā)生碰撞,造成追尾等交通事故。我國現(xiàn)有的高速公路匝道在避免此類交通事故發(fā)生的設(shè)計(jì)上,主要考慮匝道的設(shè)計(jì)長度和駕駛員對(duì)后方車輛的可視性等方面。但是由于現(xiàn)階段我國駕駛員駕駛素質(zhì)不一,一方面在經(jīng)匝道匯入主干道時(shí),很少注意后方車輛,且在匝道上加速時(shí)間過短,在沒有加速到安全車速時(shí)就匯入主干道,造成潛在的事故風(fēng)險(xiǎn);另一方面,匝道口的智能交通基礎(chǔ)設(shè)施不完善,很多駕駛員缺乏對(duì)此類情況安全性的主觀判斷,或者判斷誤差較大,而現(xiàn)有路段沒有考慮對(duì)匝道上車輛匯入主干道安全與否進(jìn)行提示。這給駕駛員安全出行帶來了極大的不便。
1、系統(tǒng)硬件設(shè)計(jì)
1.1 系統(tǒng)框架搭建
本系統(tǒng)的基本原理是使用一個(gè)毫米波雷達(dá)來采集從匝道口進(jìn)入加速段車輛的車速和此車距雷達(dá)的距離,同時(shí)采集主干道上靠近加速路最近車道上車輛的車速和此車距離雷達(dá)的距離,根據(jù)幾何關(guān)系換算得到兩車之間的距離和各自的速度,然后系統(tǒng)對(duì)當(dāng)前時(shí)刻處于加速段的車輛進(jìn)入主干道安全性進(jìn)行評(píng)價(jià),當(dāng)處于加速段的車輛進(jìn)入主干道時(shí)后車和此車之間的跟車時(shí)距較小時(shí),系統(tǒng)認(rèn)為此時(shí)進(jìn)入主干段不安全,否則安全。對(duì)評(píng)估的結(jié)果用室外LED顯示屏實(shí)時(shí)顯示,以保證駕駛員在進(jìn)入主干道時(shí)的安全性。系統(tǒng)的框架如圖1所示。
1.2 中央處理器設(shè)計(jì)
本系統(tǒng)中中央處理器采用飛思卡爾MC9S12X系列單片機(jī),具體型號(hào)為XET256。中央處理器實(shí)時(shí)采集I/O口的信號(hào),毫米波雷達(dá)將采集到的本車和周圍車輛數(shù)據(jù)傳輸至處理器,處理器雷達(dá)數(shù)據(jù)可計(jì)算出兩車之間的TTC值,并根據(jù)不同的TTC值,利用不同的信號(hào)裝置組合進(jìn)行提示。并將提示顯示在LED顯示屏上。其中處理器XET256電路圖如圖2所示,各引腳分別連接雷達(dá)傳感器、和提示裝置。
1.3 系統(tǒng)數(shù)據(jù)采集
數(shù)據(jù)采集過程為毫米波雷達(dá)采集處于加速段車輛的速度、車輛和毫米波雷達(dá)的距離,以及和加速段最近車道上車輛的速度和距毫米波雷達(dá)的距離。本實(shí)施例采用德爾福ESR毫米波雷達(dá),其有效探測范圍可達(dá)175米,掃射角度±15° 到±45°,完全能滿足實(shí)際需要。采集到的數(shù)據(jù)以CAN總線數(shù)據(jù)方式輸出,采集到的車輛速度、距離和相對(duì)角度數(shù)據(jù)直接傳輸至處理單元。
1.4 系統(tǒng)數(shù)據(jù)處理
數(shù)據(jù)處理就是根據(jù)采集到的原始數(shù)據(jù)和幾何關(guān)系,換算出加速車道上車輛和與加速車道最近車道上車輛之間的相對(duì)運(yùn)動(dòng)關(guān)系。由于雷達(dá)采集到的原始數(shù)據(jù)包括毫米波雷達(dá)和匝道上車輛之間的距離L1和角度α1以及雷達(dá)與匝道最近車道上車輛的距離L2和角度α2,兩個(gè)角度之差即為兩車與雷達(dá)構(gòu)成三角形中以雷達(dá)為頂點(diǎn)的角度,用數(shù)學(xué)上的余弦定理,在已知兩邊及夾角的情況下可計(jì)算出第三邊長度,即兩車之間的距離。同時(shí),兩車之間的相對(duì)速度可由兩車分別于雷達(dá)之間的相對(duì)速度V1和V2與角度α1和α2來確定。具體做法是以道路縱向?yàn)樨Q軸以垂直于豎軸方向?yàn)闄M軸,分別將V1和V2分解,得到V1x和V1y以及V2x和V2y,再分別將兩橫軸和兩豎軸方向上的速度分量相減,得到V1x-V2x和V1y-V2y,最后將兩個(gè)相減結(jié)果合成得到兩車之間的相對(duì)速度。
1.5 安全性評(píng)估
加速車道車輛匯入主干道的過程類似于換道過程,因此 其安全性評(píng)估借鑒當(dāng)前車載主動(dòng)安全設(shè)備換道預(yù)警系統(tǒng)中廣 泛采用的TTC(time-to-collision),將其作為本系統(tǒng)安全性評(píng) 估的重要指標(biāo)。TTC的定義是本車和本車后方目標(biāo)車道上車 輛之間的距離與兩車之間的相對(duì)速度的比值,在以往的研究 中,換道安全與否的閾值一般采用TTC值來衡量,且根據(jù)大 量的實(shí)車實(shí)驗(yàn)可知,當(dāng)兩車之間的TTC值小于3.3時(shí),此時(shí) 前車換道將會(huì)發(fā)生交通事故,而當(dāng)TTC值大于5.5時(shí),此時(shí) 前車換道一般不會(huì)發(fā)生交通事故,而TTC 值位于兩者之間 時(shí),有可能會(huì)發(fā)生交通事故,此時(shí)需要對(duì)駕駛員提供警告。 由于TTC值對(duì)換道安全性提示存在一個(gè)漏洞,即當(dāng)前車與目 標(biāo)車道后方車輛的相對(duì)速度較小,而兩車之間的相對(duì)距離也 較小時(shí),計(jì)算出的TTC值反而會(huì)很大,例如,高速公路上前 車以85㎞/h的車速行駛,而距前車縱向距離為3m的目標(biāo)車 道后方有一車輛以86km/h 速度行駛,此時(shí)TTC 值為10.8. 這是進(jìn)行換道很容易發(fā)生碰撞等危險(xiǎn)情況,需要對(duì)駕駛員進(jìn) 行安全性提示。
2、系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)軟件設(shè)計(jì)主要完成匝道車輛匯入主干道部分的安全性評(píng)估,以及根據(jù)評(píng)估結(jié)果進(jìn)行相應(yīng)的提示裝置。本系統(tǒng)采用的換道安全性評(píng)價(jià)標(biāo)準(zhǔn)參照現(xiàn)有乘用車換道預(yù)警系統(tǒng)中廣泛采用的TTC值。TTC(time to collision)=gap/relative speed,其中g(shù)ap為本車與目標(biāo)車輛的相對(duì)距離,relative speed為本車與目標(biāo)車輛相對(duì)速度。TTC值反映了本車與目標(biāo)車輛發(fā)生危險(xiǎn)碰撞潛在可能性大小,同時(shí)反映了交通沖突的劇烈程度。當(dāng)本車與目標(biāo)車輛的相對(duì)速度越小時(shí),或者速度非常接近時(shí),表明如果兩車均按照當(dāng)前運(yùn)動(dòng)趨勢(shì)行駛,則發(fā)生碰撞的可能性幾乎為0,也就是說兩車基本不可能發(fā)生碰撞。
具體安全性等級(jí)和對(duì)應(yīng)的TTC值之間的關(guān)系圖如表1所示。
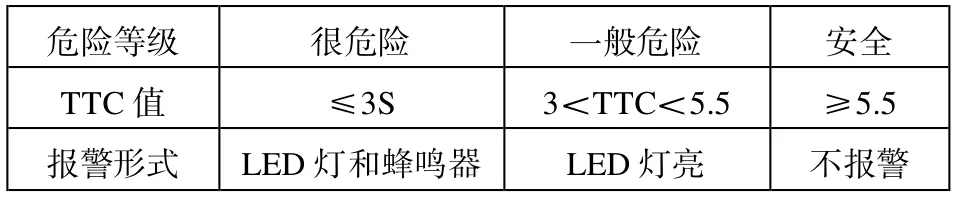
表1 TTC值和相應(yīng)報(bào)警形式之間的關(guān)系
根據(jù)表1對(duì)應(yīng)的安全等級(jí)、TTC值以及對(duì)應(yīng)的報(bào)警形式,系統(tǒng)根據(jù)傳感器采集到的數(shù)據(jù)和TTC的計(jì)算公式,實(shí)時(shí)計(jì)算出TTC值,并對(duì)計(jì)算得到的TTC值和安全等級(jí)進(jìn)行比較。
3、系統(tǒng)修正
因此本系統(tǒng)在上述TTC值基礎(chǔ)上,加入速度因素,重新搭建安全性評(píng)價(jià)規(guī)則。
新的安全性評(píng)價(jià)規(guī)則根據(jù)大量的實(shí)車實(shí)驗(yàn)數(shù)據(jù)統(tǒng)計(jì)分析得到。分別將自車速度分成40~60km/h、60~80 km/h、80~100 km/h、>100 km/h四個(gè)等級(jí),得到的安全性提示閾值如下表2所示。
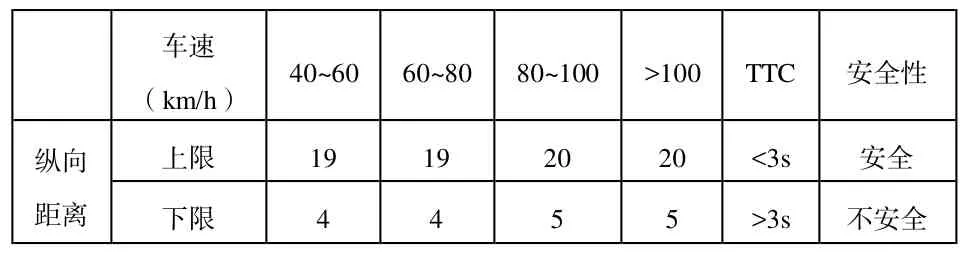
表2 四個(gè)安全等級(jí)
當(dāng)系統(tǒng)處理出的結(jié)果,即TTC值小于3s時(shí),系統(tǒng)安全性評(píng)價(jià)是安全的,此時(shí)車輛從加速車道匯入主干道時(shí)安全的,若系統(tǒng)輸出TTC值是大于3s的,則系統(tǒng)認(rèn)為此時(shí)從加速車道匯入主干道不安全,在液晶板上會(huì)出現(xiàn)不安全子樣,提示駕駛員此時(shí)不要進(jìn)行匯入主干道操作。
4、結(jié)論
本文中的匝道車輛進(jìn)入主干道安全性提示裝置主要采用毫米波雷達(dá)、LED顯示屏和ARM9處理器,能夠?qū)?jīng)匝道進(jìn)入加速段的車輛和離加速段最近車道上車輛的速度和距離進(jìn)行探測,并依據(jù)一定的計(jì)算原則,對(duì)處于加速段的車輛進(jìn)入主干道安全性進(jìn)行評(píng)價(jià),對(duì)評(píng)價(jià)的結(jié)果在LED顯示屏上實(shí)時(shí)顯示。
參考文獻(xiàn)
[1] 王華,張小寧.走廊通道高架道路匝道設(shè)計(jì)模型[J].交通運(yùn)輸系統(tǒng)工程與信息,2012,12(05):163-173.
[2] 嵌入式技術(shù)在汽車電子領(lǐng)域的廣泛應(yīng)用[DB/OL]. http://wenku. baidu. com/link?url.
[3] 任德錕.基于毫米波雷達(dá)的車間位置關(guān)系的識(shí)別方法[D].西安:長安大學(xué)碩士論文, 2012.
[5] MC9S12XET256開發(fā)平臺(tái)實(shí)驗(yàn)指導(dǎo)手冊(cè).
A safety warning system for vehicle from ramp to the main road
Yang Pengfei
( Guangdong Province Road Transport Authority, Guangdong Guangzhou 510000 )
Abstract:For vehicles entering the main road to enter the main road with the rear vehicle collision accident, this paper proposed a kind of safety tips for the main road to the main road. The system uses a millimeter wave radar to detect the position velocity relationship between the vehicle and the vehicle, and to determine the safety level of the vehicle into the main road with different TTC values. The system can effectively avoid the traffic accident when the vehicle enters the main road.
Keywords:ramp; millimeter-wave radar; TTC values; tip system
作者簡介:楊鵬飛,工學(xué)博士,就職于廣東省交通廳。
中圖分類號(hào):U472.6
文獻(xiàn)標(biāo)識(shí)碼:B
文章編號(hào):1671-7988(2015)10-57-03
