高精度送料裝置控制系統的設計
2015-02-24 07:38:40郭北濤趙呈龍
機床與液壓 2015年22期
關鍵詞:系統
郭北濤,趙呈龍
(沈陽化工大學機械工程學院,遼寧沈陽 110142)
隨著技術的進步,工業生產線對其送料裝置提出了越來越高的要求,如應滿足送料的高精度和高效率。文中所設計的基于運動控制卡和PC機的控制方式充分發揮了伺服系統控制精度高、響應速度快和運行平穩等優點,有效地提高了送料的精度和效率,滿足了生產廠家的控制要求[1]。
1 送料裝置結構設計
送料裝置包括機械部分、控制部分、動力源、檢測部分和執行元件,主要由伺服電機、滾珠絲杠、直線導軌和光柵尺等組成。簡化的送料裝置機械結構簡圖如圖1 所示[2]。

圖1 送料裝置機械結構簡圖
在控制系統的設計方案中,PC機和運動控制卡構成主從式控制結構,圖2為基于運動控制卡搭建的送料裝置控制系統硬件結構圖。在基于運動控制卡的送料系統控制方案中,PC機作為控制系統的中心部分,可以專注于人機界面、實時監控和發送指令等系統管理工作;運動控制卡負責處理所有運動控制的細節,如升降速計算和行程控制等,且無需占用PC機資源。運動控制卡還提供了功能強大的運動控制軟件庫如C語言運動庫、Windows DLL動態鏈接庫等,讓用戶更快、更有效地解決復雜的運動控制問題[3]。
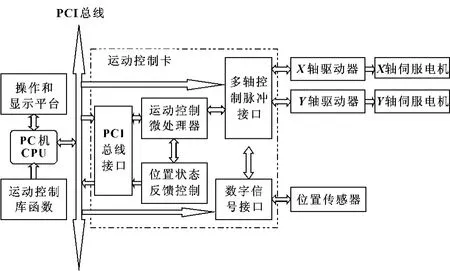
圖2 送料裝置控制系統硬件結構
運動控制卡以PCI插卡形式嵌入PC機中,將PC機的信息處理能力和運動控制能力有機地結合到一起,具有開放性程度高、使用簡便、功能豐富、實時調整優點突出、運動控制軌跡準確、通用性好和可靠性高的優點。運動控制函數庫為單軸及多軸的伺服或伺服控制提供了許多運動函數,如單軸運動、多軸獨立運動、多軸插補運動等。另外,為了配合運動控制系統的開發,還提供了以下輔助函數,如中斷處理、編碼器反饋、間隙補償,運動中變速等[4]。
運動控制卡嵌入到PC機中,其本身不能直接與普通的二四相、或三六相伺服電機連接,必須要有伺服電機細分驅動器作為功率級、相序發生單元。伺服電機細分驅動器的選型與伺服電機相關,比如電機的相數和工作電壓、電流等。通過PC上的人機交互界面設置系統的運動控制參數,軟件控制運動控制卡發送出脫機、方向速度脈沖給伺服電機細分驅動器控制伺服電機轉動。該系統采用Panasonic伺服驅動器,該驅動器有速度控制模式和位置控制模式,可以接收差分和光耦輸入,并有伺服報警、定位完成、速度到達、轉矩限制和速度限制等伺服電機控制的反饋信號[5]。
2 軟件設計
為滿足精確定位和大負荷平穩運行等要求,與伺服電機直接相連的增量式碼盤用于速度反饋;安裝在工作臺上的直線光柵尺用于測量位置信號。對工作臺的位移進行實時采集測量并反饋到運動控制卡上進行閉環控制。相比于開環和半閉環控,制能部分消除絲杠的加工誤差和隨絲杠磨損出現的誤差,精度、速度及動態特性均有一定的優越性[6]。
電機的運動控制是整個控制系統的核心,其流程如圖3所示。首先啟動系統,并進行系統初始化和設置相應的運行參數;其次,根據位置傳感器傳送的信號由上位機經過判斷和運算,發出指令給運動控制卡;運動控制卡發送出脈沖信號給伺服電機細分驅動器繼而控制伺服電機轉動,從而實現電機的運動控制[7]。
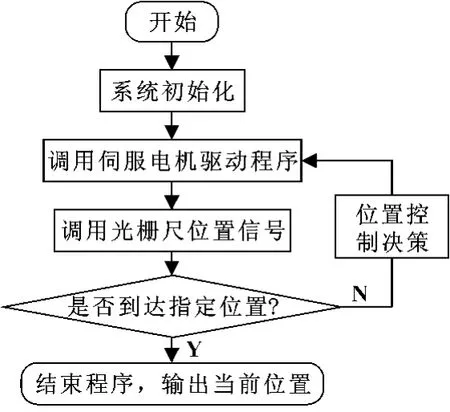
圖3 伺服電機控制流程圖
系統采用研華PCI-1240二軸運動控制卡,該卡提供了功能強大的Windows DLL動態鏈接庫程序。在運動函數庫中所使用到的函數主要有如下幾種:控制卡及軸設置函數,獨立運動和插補運動函數,制動函數,位置和狀態設置及查詢函數,I/O口操作函數,錯誤代碼函數。Visual C++6.0作為開發工具,利用PCI1240運動控制卡的Windows驅動程序以及API運動函數庫,實現PC機與運動控制卡的實時通信,可以高效地開發出運動控制系統軟件[8]。圖4為所開發的送料裝置軟件操作界面。
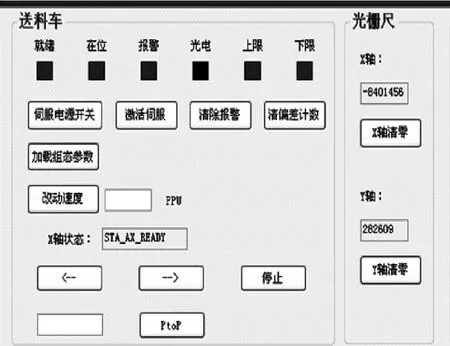
圖4 軟件操作界面
3 結束語
文中基于控制運動控制卡的送料裝置能夠實現對工件的精確定位和控制。系統具有硬件組建周期短、精度高、易于維護和實現的優點。通過調用運動函數庫使得軟件開發周期大為縮短,并且具有良好的人機交互界面,在實際使用中運行良好。該系統可提高送料效率和精度,具有一定的通用性和推廣性。
[1]劉曉萌.定長送料系統多軸同步控制[D].杭州:浙江大學,2012.
[2]殷悅,屈百達.模糊神經網絡在數控全閉環系統位置控制上的應用[J].機床與液壓,2012,40(21):19 -22.
[3]王世紅,徐世許,張傳林.送料機定長送料的伺服控制系統設計[J].機械工程與自動化,2012(2):152-154.
[4]涂芬芬.基于運動控制卡的多軸機床控制系統[J].南京航空航天大學學報,2012,44(2):146-150.
[5]宋洋,王新,明軍.MPC08SP運動控制卡在煙把智能定位系統中的應用[J].計算機技術與發展,2010,20(12):185-188.
[6]廖代海.基于伺服控制的鋁型材生產線設計研究[D].長沙:中南大學,2012.
[7]董震,張立新,胡學龍,等.基于運動控制卡的數控試驗臺設計與仿真[J].農業工程,2012(12):40-42.
[8]潘強,鞠玉濤.步進電機直線定位系統設計及仿真研究[J].計算機仿真,2012,29(9):188 -190.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
