隧道接觸網施工鉆孔設備電液控制系統的設計
2015-02-24 07:38:10劉軍劉桓龍柯堅王國志鄧斌
機床與液壓 2015年22期
劉軍,劉桓龍,柯堅,王國志,鄧斌
(西南交通大學機械工程學院,四川成都 610031)
針對現有地鐵隧道剛性懸掛接觸網安裝施工中錨螺栓孔鉆孔工藝機械化程度和鉆孔質量低的特點設計的新型鉆孔設備,其三維模型如圖1所示。
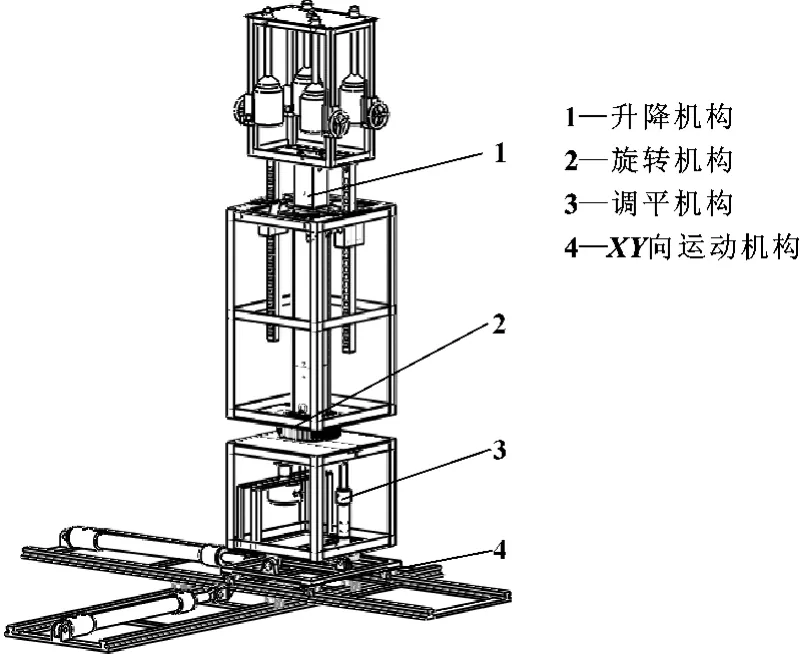
圖1 鉆孔設備結構簡圖
該裝置的主要功能是實現鉆具在隧道內鉆孔定位的機械化和自動化,然后控制鉆具完成鉆孔作業。其結構主要包括升降機構、旋轉機構、調平機構和XY向運動機構,通過電液控制系統控制其運動。其中,升降柱機構主要通過液壓缸驅動的套管立柱實現上下直線運動,旋轉機構通過擺動液壓缸驅動齒輪帶動設備實現水平面內旋轉,調平機構采用液壓驅動實現平臺的左右自動調平,XY向運動機構為水平面內的直線運動機構。作者對鉆孔設備的電液控制系統進行設計,通過電信號按照作業要求實現對機構的運動控制。
1 液壓控制系統設計
各運動機構均采用液壓驅動。其中X、Y向運動機構驅動液壓缸的設計行程為750 mm,調平機械的設計調平范圍為±15°,旋轉機構擺動液壓缸的擺動范圍為±120°,升降機構的設計行程為1 000 mm。各液壓缸除了能平穩地運動到預定位置外還能實現在預定位置的可靠鎖定。液壓控制系統原理如圖2所示。
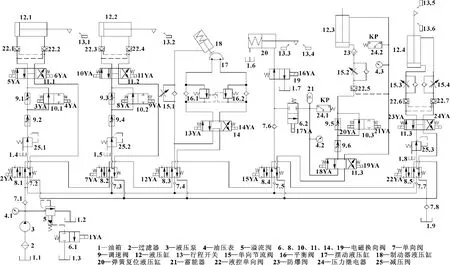
圖2 鉆孔設備液壓控制系統原理圖
如圖2,因為要對各執行元件實行分別控制,所以液壓系統采用由多路換向閥8組成的并聯回路組成。液壓泵3輸出的油能直接進到各換向閥8的進油腔。各聯控制回路通過換向閥8的右位卸荷,左位進油工作。
如圖2所示,X向運動機構液壓缸12.1通過兩個調速閥實現兩級調速,方便鉆孔裝置的精確定位。為實現較平穩的速度換接,兩個調速閥采用串聯連接。為使液壓缸能實現任意位置的可靠鎖定,在液壓回路上設計由兩個液控單向閥組成的雙向液壓鎖,同時液控單向閥還具有平衡閥的作用。Y向運動機構液壓控制回路原理相同。
旋轉機構液壓控制回路中設計有兩個平衡閥16.1、16.2,使擺動液壓缸的運動平穩。擺動液壓缸17的制動器液壓缸18為常抱閘狀態,在回路不通油時,其在彈簧力的作用下將擺動液壓缸鎖定,當回路進油即電磁鐵12YA得電時,油壓克服彈簧力緩慢地將制動器液壓缸18與擺動液壓缸17分離,從而擺動液壓缸能正常轉動,并帶動鉆孔設備平臺轉動。在旋轉機構上設計有角度傳感器,用以觀測擺動液壓缸的旋轉角度,方便控制。
升降機構液壓控制回路有兩個執行元件,即控制機械鎖銷的彈簧復位液壓缸20和驅動升降柱運動的液壓缸12.3。兩個執行元件的控制回路通過行程開關實現順序控制。機構上升時,液壓回路首先將鎖死銷拔出,然后控制機構上升。當機構到達預定鉆孔位置后,鎖死銷重新將機構機械鎖定,同時液壓缸12.3通過液控單向閥22.5和蓄能器21實現液壓鎖定。機構下降時,液控單向閥22.5起平衡閥作用。當機構下降到最低位時,機械鎖將升降機構鎖定。在液壓缸無桿腔的進油口還設計有防爆閥23,當進油管道爆裂時,管路流量突然增大,防爆閥自動關閉,阻止液壓缸突然下落,防止安全事故的發生。
當鉆孔裝置平臺傾斜時,不僅會影響裝置的定位精度,嚴重時會引起平臺側翻。調平機構液壓控制回路中兩個液控單向閥22.6、22.7起雙向液壓鎖和平衡閥的作用。同時,由于液壓缸12.4是立式的,為了防止液壓缸向下運動時由于液控單向閥的開和關斷斷續續而引起的振動現象,在回路上設計有單向節流閥,使回油路油液的流速平穩,從而減小液壓缸的振動。
2 電控系統設計
液壓系統中各電磁鐵、繼電器和行程開關的動作順序由電控系統控制。電路控制系統的原理圖如圖3所示。
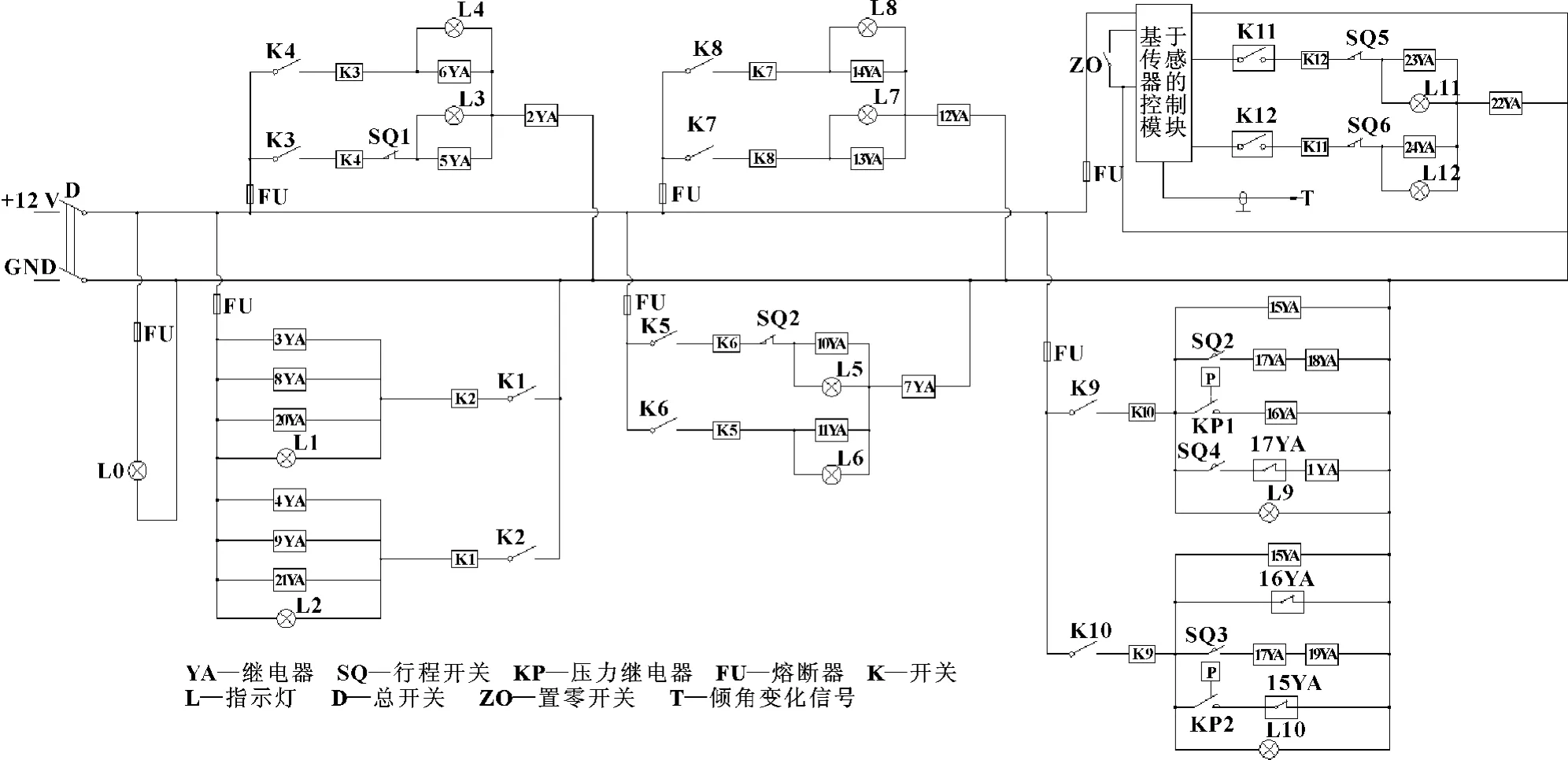
圖3 電控系統原理圖
圖3中,YA指液壓缸電磁鐵的繼電器開關,分常開和常閉型。L0為總開關指示燈。K1為各運動機構速度調節中的快速開關;K2為慢速開關。其他各開關分別成對控制某一運動機構驅動液壓缸的正反向運動。并且各運動機構正反向運動控制開關都設計為接通和切斷信號反向互鎖,防止誤操作。
3 無線控制系統設計
電控系統中各物理開關既可以通過計算機實現全自動控制又可以通過手動控制。通過無線傳輸控制信號能解決有線傳輸布線繁瑣、束縛操作人員活動空間且不易拆卸的問題。基于隧道內環境和可靠性要求的考慮,決定采用基于DTMF編碼的遠程無線控制方案。
DTMF編碼即雙音多頻信號,由一組高頻信號和一組低頻信號組成,具有簡單、穩定、抗干擾能力強的特點,并廣泛應用于固話、對講機等無線通信設備中,是工程用遠程無線信號控制的理想選擇。
YST121-04遠程無線遙控開關板是利用兩個對講機傳輸DTMF編碼信號,從而實現對設備遠程控制的電子控制模塊。該模塊的控制信號是一串帶有密碼的控制指令,所以其傳輸的指令信號既安全又具有強的抗干擾能力。一塊該開發板能控制遠端4個開關量。在此設計中采用3塊開發板控制,各開發板的控制指令能自定義。無線遠程控制系統的原理如圖4所示。

圖4 無線控制系統原理圖
圖4中,對講機1為本地遙控機,對講機2為遠端受控機。工作時,操作人員通過對講機1發送DTMF碼指令到對講機2,對講機2將信號傳遞給YST121-04開關板,開發板對信號進行確認分析后控制相應的繼電器開和關,以實現對遠程控制開關量的控制。
該遠程無線控制方案開發成本較低。對講機選用摩托羅拉或建伍等成熟品牌以提高信號傳輸的質量。
在地鐵隧道內試驗,用一臺4 W的高功率摩托對講機進行干擾。當接收端與發射端位于空曠隧道內時,在50和70 m的測試距離下都不存在干擾。當接收端與發射端中間有設備車 (金屬屏蔽)時,測試結果如表1所示。

表1 干擾測試1
當接收端與發射端之間有鋼筋混凝土墻阻擋,即拐彎處,同時中間又有設備車 (金屬屏蔽)時,測試結果如表2所示。

表2 干擾測試2
設計中的本地遙控機和遠端受控機之間的距離在20 m范圍以內。通過試驗結果可知,其基本不受干擾機影響,滿足設計要求。
4 結論
完成了一種新型地鐵隧道剛性懸掛接觸網安裝施工中錨螺栓孔鉆孔設備控制系統的設計,包括液壓控制系統的設計、電路控制系統的設計以及遠程無線控制系統的設計。采用機電液一體化的控制系統具有傳動可靠、功率密度大、控制精確方便的特點。經過理論分析和初步的實驗,該鉆孔設備具有較高的穩定性、可靠性和自動化程度,為實際生產奠定了理論基礎。
[1]初長紅.TY型接觸網作業車液壓系統[J].太原科技,2002(4):39-40.
[2]李壯云.液壓元件與系統[M].2版.北京:機械工業出版社,2005.
[3]侯云輝,劉志奇,盧菡涵,等.基于S7-200PLC技術的升降平臺控制系統設計[J].液壓氣動與密封,2013(2):41-44.
[4]成文術,楊波.基于單片機技術的機車升降平臺控制系統設計[J].機械工程與自動化,2010(4):152-156.
[5]單亞男,劉志奇,武宗才,等.接觸網作業車自動控制作業平臺的實現[J].液壓與氣動,2011(5):58-61.
[6]張文增.基于AVR嵌入式單片機的定時及遠程控制系統[J].計算機光盤軟件與應用,2011(1):153-154.
[7]張利平.液壓傳動系統及設計[M].北京:化學工業出版社,2005.
[8]孫驊,王業潘.新式輕巧型曲臂高空工程作業車液壓控制系統的設計與分析[J].機床與液壓,2010,38(14):31-34.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
