基于模型參考自適應控制的穿孔軋機控制系統設計
2015-02-17 01:32:20趙秀春徐國凱葛平淑
大連民族大學學報 2015年5期
趙秀春,徐國凱,葛平淑,張 濤
(大連民族大學 機電信息工程學院,遼寧 大連 116605)
隨著電力技術與控制技術的發展,軋制技術的自動化也取得了迅速的發展,穿孔軋機速度控制系統主要集中在控制驅動電機的速度[1]。根據伺服電機的測量值與設定值之間的差值,通過控制伺服電機來實現精確的速度控制。而軋制過程中,除了要求電機實現設定的轉速,還要求其不受負載擾動,參數變化等因素的影響,而電力系統的驅動控制是自適應控制技術最成功的應用之一[2-4],模型參考自適應控制器不僅可以保證系統的跟蹤和穩定性,同時也能使其在外部擾動和不確定性因素的影響下仍能夠保持良好的控制性能。
自麻省理工學院在1950 年代末首次提出自適應控制技術,之后出現了許多不同的形式的自適應控制方法,如Dressber、Price 和Pearson 早期提出的設計方法[3-5],但這些方法還不能保證系統的全局漸近穩定性。而后Monopoli 基于雅可比穩定性理論研究了一種增廣誤差信號的自適應控制律[5],通過調整控制器輸入和輸出參數來獲得良好的性能,避免采用微分輸出信號。然而,這種方法控制參數繁多和結構復雜難以實現。因此,減少模型參考自適應控制器可調參數、簡化了控制器結構成為了自適應控制技術實際應用的關鍵。此外,在實際的控制系統中不可避免的存在各種各樣的擾動信號,因此,提高系統的魯棒性,保證系統在受到外界干擾,存在不確定因素下保持系統的穩定性已經成為迫切解決的問題[6-8]。本文設計了一種自適應控制器,通過從控制器輸入獲得的濾波反饋增益,使系統具有良好的動態控制性能。
1 穿孔軋機控制系統的設計
穿孔軋機通常用于無縫鋼管的軋制,其速度控制對生產效率和產品質量都起著非常重要的作用。根據伺服電機的測量值與設定值之間的差值,通過伺服電機實現速度的精確控制。穿孔軋機控制系統以直流電動機、可控硅整流器和電機電流回路作為控制對象。簡化的系統的動態結構如圖1。系統的性能指標選為:超調量為Mp=10%,調節時間為ts=10 s,以此,選定系統的參考模型為


圖1 穿孔軋機控制系統的結構圖
相關參數定義見表1。

表1 系統參數定義
2 模型參考自適應控制器的設計
模型參考自適應控制系統結構如圖2。其有界分段連續的參考輸入下,控制器都能使輸出響應滿足輸入命令的期望。即通過調整控制器參數控制被控對象的輸出和參考模型輸出之間的跟蹤誤差收斂到零,=0,(e(t)=Ym(t)-Yp(t))。
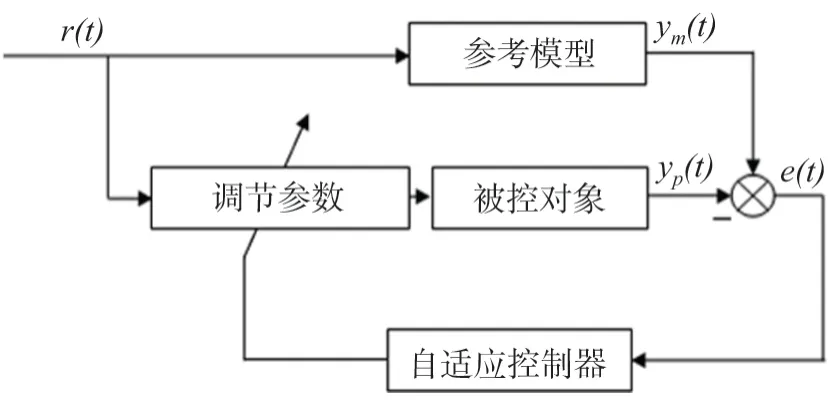
圖2 模型參考自適應控制系統結構圖
系統的參考模型采用輸入-輸出微分方程描述

式中,Am(p)=pn-h+。m2≤n-h -1,ai、bi為未知常數,r、Ym分別為參考模型的輸入與輸出,h 表示被控對象與參考模型的階數差,p 為微分算子,p=d/dt。
對應的被控對象同樣采用輸入輸出微分方程描述為

其中,αi、βi為不確定慢時變常數,up、Yp分別為被控對象的控制輸入與輸出,且Bp為赫爾維茨多項式。
構造自適應控制器的結構如圖3。
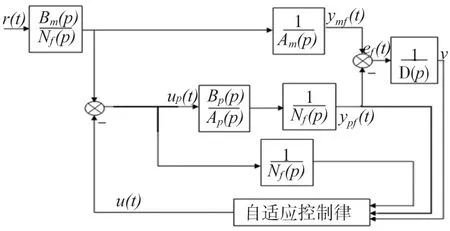
圖3 模型參考自適應控制器結構圖
令Ap(p)=Am(p)H(p)+F(p) 其中,H(p)=ph,
式中hi,fi為與ai相關的未知常數或慢時變參數。將其代入被控對象,被控對象變換為

將參考模型兩端同時加上F(p)Ym(t),這模型變為

(5)-(4)式,且將e(t)=Ym(t)-Yp(t)Z 代入得


上式兩邊用濾波器Nf(p)濾波得

Yapf=Yp;upf=。
串聯線性補償器D(p),即v=D(p)ef代入(7)式得等價誤差方程為

所以控制輸入u1為

將式(8)代入式(7)得

應用超穩定定理,當參數自適應系統滿足下列條件時,是全局漸進超穩定的。
(1)傳遞函數D(p)/F(p)是嚴格正實的;
(2)比例積分自適應律為

3 仿真結果
基于模型參考自適應控制的穿孔軋機速度控制系統結構如圖1 所示。驅動電機的參數選為:Pe=1500kw,Ie=1720 A,R=0.0314Ω,L=0.003 H,J=1547 kg·m-2,Ks=152,Ts=1.67 ms,Cmφ=29 Nm/A,參考模型如式(1)。模型參考自適應控制器的結構如圖3。利用Matlab/Simulink 仿真結果如圖4 -6。
從仿真結果圖4 可以看出,被控對象輸出與參考模型曲線幾乎重合,其超調量和調節時間均達到系統要求,且當負載出現如圖5 的隨機擾動信號時,其跟蹤誤差仍能迅速減小至理想范圍。跟蹤誤差如圖6 所示,誤差在100s 時達最大,幅值為0.8,并迅速調節為系統的5%以內,綜上結果表明該系統具有較強的跟蹤性和較高的抗干擾能力。

圖4 系統輸出響應曲線

圖5 加在負載端的擾動信號

圖6 控制器的跟蹤誤差曲線
4 結 語
本文提出了一種用于穿孔軋機速度控制系統的模型參考自適應控制器。該控制器是基于波波夫超穩定理論,通過從控制輸入和輸出的濾波微分反饋調節控制器參數,從而使系統在即使存在外部擾動和不確定性的情況下仍然具有良好的控制性能。通過MATLAB 建立系統模型,并引入負載擾動,進行仿真研究。結果表明:控制器具有較強的抗干擾能力和信號跟蹤性,很好的克服了穿孔軋機負載擾動及參數不確定等因素的影響。
[1]王樂.冷帶軋機速度控制系統的魯棒跟蹤控制研究[D].秦皇島:燕山大學,2002.
[2]ZHAO Xiuchun,XU Guokai. Adaptive Control of Double Housing Planer[J]. Proceedings of the 27th Chinese control conference,2008,20 (7):20 -23.
[3]BOUKATTAYA M,DAMAK T,JALLOULI M. Robust Adaptive Control for Mobile Manipulators [J].I3nternational Journal of Automation and Computing,2011(2):8 -13.
[4]ZHANG Pengfei,PENG Weidong. Control of Induction Motor Based on Model Reference Adaptive System[J].Modern Electronics Technique,2011(1):196 -199.
[5]吳世昌,吳忠強.自適應控制[M]. 北京:機械工業出版社,2005.
[6]方強,陳利鵬,費少華,等. 定位器模型參考自適應控制系統設計[J]. 浙江大學學報:工學版,2013(12):2234 -2241.
[7] LI Zhixiong,YAN Xinping. Model Reference Robust Control for Marine Propulsion Systems with Model Uncertainty Caused by Hull Deformation[J].Journal of Marine Science and Technology,2013(8):400 -409.
[8]王柏林. 一種具有強魯棒性的模型參考自適應控制系統[J].控制與決策,2005(1):66 -68.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19