基于點離散度的張正友標定法
2015-02-01 01:34:36田苗郝向陽劉松林張小東
全球定位系統 2015年6期
田苗,郝向陽,劉松林,張小東
(信息工程大學 導航與空天目標工程學院,鄭州 450001)
?
基于點離散度的張正友標定法
田苗,郝向陽,劉松林,張小東
(信息工程大學 導航與空天目標工程學院,鄭州 450001)
摘要:相機標定是視覺導航的基礎,現有的大部分相機標定算法,需要提取標定模板上的全部標志點進行標定。標志點越多,標定精度越高,但標志點過多會影響標定速度。為了能夠快速有效的進行相機標定,本文在大量試驗的基礎上提出選取離散度高的少量標志點進行相機標定。以MATLAB 2009為平臺,編程實現張正友標定法,并用張正友提供的物點坐標與像點坐標進行多次試驗,試驗表明:僅用8個離散度高的標志點即可達到或接近用256個標定點的標定精度。
關鍵詞:視覺導航;相機標定;點離散度;張正友標定法
0引言
隨著生活質量和科技水平的迅猛發展,人們對室內導航服務的需求日益增加。目前應用比較廣泛的導航方式有衛星導航,慣性導航等,但是衛星導航信號極易受到干擾,且很難完成室內導航任務,一般適用于室外開闊場地,慣性導航誤差發散。因此研究一種適合室內的導航方式成為導航領域的熱點。隨著計算機視覺和圖像處理等相關技術的發展,出現一種新型的導航方式——視覺導航[1-3],這種導航方式通過視覺傳感器獲取圖像,運用計算機視覺等相關技術獲取導航信息,從而完成導航任務。視覺導航具有精度高、不受干擾、適用于室內環境等特點。相機標定是實現視覺導航的基礎。相機標定按標定原理可以分為三類:傳統相機標定法、自標定法和主動視覺標定法[4-5]。傳統的相機標定法[6-7]是指利用高精度,且空間結構已知的標定塊作為標定物,通過計算空間坐標與圖像坐標之間的映射關系,求取攝像機的內外參數,這種標定法精度很高。自標定法[8]是指無需高精度的標定塊,僅利用自然景物作為標定參照物,通過多幅圖像中對應點的關系來確定攝像機的內外參數矩陣。主動視覺標定法[9]是指利用自主控制攝像機運動獲取的圖像線性求解攝像機內外參數。該方法需要高精度的主動視覺平臺,其成本昂貴,一般的單位和個人負擔不起。1999年,微軟研究院的張正友[10]提出了一種介于傳統標定法與自標定法之間的基于移動平面模板的相機標定方法,該方法是目前應用最廣泛的標定方法之一,它具有魯棒性好,精度高等優點。
現有的標定算法,大多提取靶標中的全部標志點進行標定,標志點越多標定精度越高。采用較少的標志點可以提高標定速度,但精度不高。因此,使用最少標志點或較少標志點完成攝像機的標定并獲得準確結果是最近研究的熱點。
在張正友標定的基礎上,本文通過實驗發現,選取離散度較高的少量標志點可以達到或接近用全部標志點進行標定的結果。
1張正友標定法

攝像機模型用針孔模型,空間點M與圖像坐標點m之間的映射關系為

(1)
式中:s為任意的非零尺度因子; R是旋轉矩陣,它是3×3的單位正交陣; T為平移向量,R,T稱為攝像機的外參數矩陣,矩陣A為3×3的上三角矩陣,稱為攝像機的內參數矩陣,定義為
聯系人: 田苗 E-mail:tm_happy@yeah.net

(2)
式中: (u0,v0)為光學中心像主點;α,β為有效焦距(即α=f/dx,β=f/dy,其中dx,dy為水平方向與豎直方向的像元間距),γ為u軸和v軸的不垂直因子。
張正友標定法采用平面標定模板,因此z≡0,記R的第i列向量為ri,則式(1)可表示為

(3)

(4)

(5)
則

(6)
vij=[hi1hj1hi1hj2+hi2hj1hi2hj2hi3hj1+
hi1hj3hi3hj2+hi2hj3hi3hj3]T,
其中hi為H的第i列。
式(4)可寫為

(7)
對標定模板從不同方向拍攝n幅圖像,將n組這樣的方程組疊放起來,得
Vb=0.
(8)
則V為2n×6的矩陣,因此當n≥3時,可求得b的最優解。從b中分解出相機內外參數,通過最小二乘法對所有參數進行優化求解。
2點的離散度
標志點數目及其提取精度、標定模板的選擇及其制作精度等均影響相機標定的速度及精度。標志點越多,標定精度越高,但其標定速度會比較慢。因此,在精度要求不高的場合,可適當選取較少的標志點,在不影響要求標定精度的情況下,提高相機標定速度。當標志點分布較分散時,得到的標定結果會較為理想。標志點分布的分散程度可用點的離散度來表示。
設第i個點Ai和第j個點Aj的圖像像素坐標為(xi,yi),(xj,yj),則點的離散度s定義為點與點之間的均方根距離的平均值,單位為像素,對于n個測試點有


式中,i=1,2,3,…,n.
3實驗結果與分析
本實驗在MATLAB2009平臺上編程實現張正友標定法。為了比較對照,以及對所提出的結論進行驗證,本文以用文獻[10]中的圖像所做的實驗為例進行驗證。所用的數據[11]為張正友提供的像點坐標和物點坐標。張正友標定法選用8×8個方格的平面標定模板,每個方塊的尺寸為17cm×17cm,因此標定模板上有256個標志點。采用鏡頭焦距為6mm的PULNIXCCD相機,從不同角度拍攝標定模板得到5幅圖像,圖像分辨率為640pixel×480pixel,如圖1所示。

圖1 張正友標定法實驗圖
用整幅圖像即256個標志點進行標定,其標定結果如下:
等效焦距α=832.4997pixel,β=832.5295pixel像主點u0=303.9589pixel,v0=206.5855pixel.
選取不同離散度的8個標志點做標定,標定結果如表1所示。
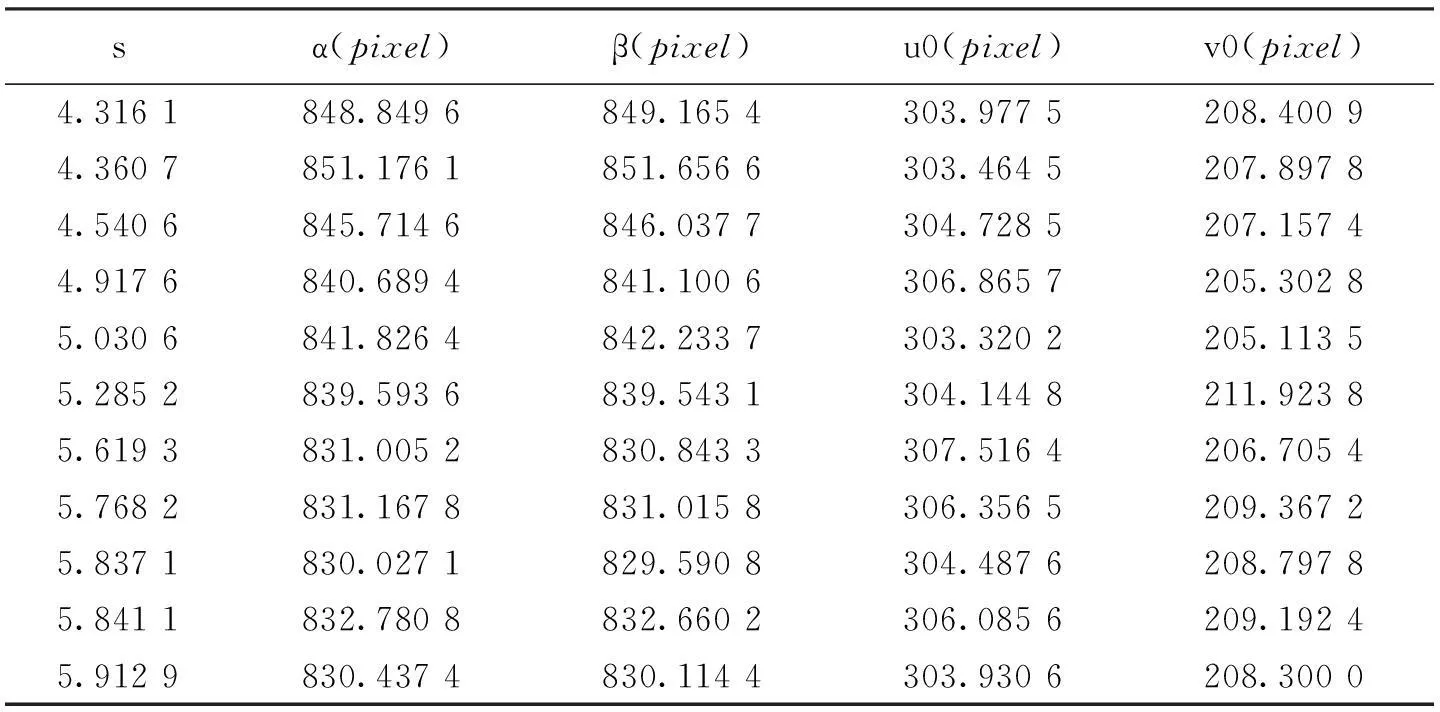
表1 不同離散度的內參數
由表1可以看出,當點的離散度越高時,標定結果越接近用全部標志點做標定的結果。因此在精度要求不高,且要求時效性的系統及工程應用中,可選取少量離散度高的標志點來進行攝像機標定。
4結束語
隨著計算機視覺的不斷發展成熟,室內導航越來越多的采用視覺導航方式。相機標定是實現高精度視覺導航的基礎。本文以張正友相機標定法為基礎,在MATLAB2009平臺上編程實現。選取標定模板中的8個標志點進行標定,得到了接近用256個標志點的標定結果。實驗發現,用較少的標志點進行標定時,可以通過選取離散程度較高的標志點來提高標定精度,使其接近于用標定模板中全部標志點的標定結果。因此,在精度要求不高的場合下,可用離散程度高的較少標志點來完成標定,提高標定速度。
參考文獻
[1] 馬頌德,張正友.計算機視覺-計算理論與算法基礎[M].北京:科學出版社, 1998:1-9.
[2] 徐德,譚民,李原.機器人視覺測量與控制[M].北京:國防工業出版社, 2008: 1-10.
[3]HARTLEYRI,ZISSERRMANA.Multipleviewgeometryincomputer[M].2nd.CambridgeUniversityPress,Cambridge.2003.
[4] 邱茂林,馬頌德,李毅.計算機視覺中攝像機標定綜述[J].自動化學報,2000(1):46-57.
[5] 張廣軍.機器視覺[M].北京:科學出版社,2006(6):122-123.
[6]SHENE,HORNSEYR.Multi-cameranetworkcalibrationwithanon-planartarget[J].IEEESensorsJournal. 2011,11(10): 2356-2364.
[7]TSAIR.Aversatilecameracalibrationtechniqueforhigh-accuracy3Dmachinevisionmetrologyusingoff-the-shelfTVcamerasandlenses[J].IEEEJournalofRoboticsandAutomation,1987,3(4): 323-344.
[8] 吳福超,胡占義.攝像機自標定的線性理論與算法[J].計算機學報2001,24(11):1121-1235.
[9] 吳福朝,李 華,胡占義.基于主動視覺系統的攝像機自定標方法研究[J].自動化學報, 2001, 27(6), 736-746.
[10]ZHANGZ.Aflexiblenewtechniqueforcameracalibration[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2000,22(11): 1330-1334.
[11]張正友.相機標定[EB/OL][2015-03-03].http://research.microsoft.com/zhang/Calib/
田苗(1989-),女,甘肅白銀人,碩士生,主要研究方向為視覺測量與視覺導航。
郝向陽(1966-),男,河南濟源人,教授、博導,主要研究方向為攝影測量與遙感、計算機視覺、視覺測量與視覺導航。
劉松林(1976-),男,河南民權人,副教授,主要研究方向為計算機視覺與視頻技術、視覺測量與視覺導航。
張小東(1991-),男,陜西延安人,碩士生,主要研究方向為無人機視覺導航。
Zhang’s Camera Calibration Method Based on
Corners Dispersion
TIAN Miao,HAO Xiangyang,LIU Songlin,ZHANG Xiaodong
(SchoolofNavigationandAerospaceEngineering,PLAInformation
EngineeringUniversity,Zhengzhou, 450001)
Abstract:The base of vision navigation is camera calibration. For most of the current camera calibration algorithms, it is necessary to extract all the corners of the calibration pattern. The more corners, the higher calibration accuracy will be.However,the speed of calibration will be influenced by excessive corners. For the purpose of fast and effective camera calibration,based on large trials, a new calibration with a few of high dispersion corners is put forward in this paper. Zhang’s camera calibration method is realized on MATLAB 2009 while several trials are carried out using 3D point and image point coordinates supplied by ZhengyouZhang.Trials prove that the 256 corners calibration accuracy can be reached or approached by using only 8 higher dispersion corners
Key words:Vision navigation; camera calibration; corners dispersion; Zhang’s camera calibration method
作者簡介
收稿日期:2015-06-12
中圖分類號:TP391
文獻標志碼:A
文章編號:1008-9268(2015)06-0086-04
doi:10.13442/j.gnss.1008-9268.2015.06.019