基于恒虛警率的雙閾值檢測(cè)方法?
2015-01-23 02:48:19
雷達(dá)科學(xué)與技術(shù) 2015年2期
(海軍航空工程學(xué)院信息融合技術(shù)研究所,山東煙臺(tái)264001)
0 引言
對(duì)海導(dǎo)航雷達(dá)視頻圖像經(jīng)過(guò)預(yù)處理(包括平滑去噪和背景移除)以后,艦船目標(biāo)表現(xiàn)為亮度(灰度值)較高的區(qū)域,而海面背景表現(xiàn)為較暗的區(qū)域,艦船目標(biāo)的檢測(cè)即是暗背景下亮目標(biāo)的檢測(cè)問(wèn)題[1-3]。利用艦船目標(biāo)和周?chē)S蛩憩F(xiàn)出灰度特征差異,可以通過(guò)對(duì)雷達(dá)視頻圖像的閾值分割[4-5]實(shí)現(xiàn)目標(biāo)檢測(cè)。簡(jiǎn)單的閾值處理是將大于閾值T的點(diǎn)作為對(duì)象標(biāo)注,其他點(diǎn)作為背景點(diǎn)置零,從而實(shí)現(xiàn)對(duì)目標(biāo)的提取。
常用的閾值處理方法有全局閾值和局部閾值兩種處理思路[6-9]。全局閾值針對(duì)背景灰度值恒定,所有目標(biāo)與背景對(duì)比度相似的圖像使用,用固定的閾值來(lái)對(duì)整幅圖像進(jìn)行門(mén)限選擇,快速簡(jiǎn)單地實(shí)現(xiàn)目標(biāo)的檢測(cè);局部閾值針對(duì)背景的灰度值分布不均勻,目標(biāo)與背景對(duì)比度相差較大的圖像使用,常用的處理方法是針對(duì)各個(gè)區(qū)域局部進(jìn)行預(yù)處理補(bǔ)償圖像,然后再進(jìn)行全局閾值檢測(cè),該思路算法復(fù)雜,處理時(shí)間長(zhǎng)。
對(duì)海導(dǎo)航雷達(dá)視頻圖像由于其成像特點(diǎn)和掃描環(huán)境,背景灰度值分布不均勻,不同距離、不同環(huán)境下目標(biāo)與背景的對(duì)比度不盡相同,本文結(jié)合全局閾值和局部閾值處理思路,綜合全局閾值處理速度快、算法簡(jiǎn)單,局部閾值處理精度高的優(yōu)點(diǎn),提出一種基于恒虛警率的雙閾值檢測(cè)方法。該方法針對(duì)對(duì)海導(dǎo)航雷達(dá)視頻圖像目標(biāo)檢測(cè)的特點(diǎn)和要求,能夠快速、準(zhǔn)確地進(jìn)行目標(biāo)檢測(cè)。
1 基于恒虛警率的雙閾值檢測(cè)方法
1.1 基于恒虛警率的閾值檢測(cè)
在對(duì)海雷達(dá)視頻圖像中,經(jīng)過(guò)預(yù)處理后,目標(biāo)檢測(cè)問(wèn)題主要是暗背景下亮目標(biāo)的檢測(cè)問(wèn)題,則該圖像可以看成僅包含兩個(gè)主要灰度級(jí)區(qū)域:由雜波構(gòu)成的暗灰度區(qū)域和由目標(biāo)構(gòu)成的亮灰度區(qū)域,如圖1所示。我們將這些值看成隨機(jī)量,并將其直方圖看成其概率密度函數(shù)(PDF)的估計(jì)p(z)。目標(biāo)檢測(cè)的實(shí)質(zhì)上是選擇一個(gè)合適的閾值T,并滿(mǎn)足式(1),使圖像在滿(mǎn)足虛警率為Pf的前提下分割為兩個(gè)可區(qū)分的區(qū)域。


圖1 兩個(gè)區(qū)域的灰度級(jí)概率密度函數(shù)
假設(shè)對(duì)海雷達(dá)視頻圖像經(jīng)過(guò)地物雜波移除和平滑去噪以后,圖像背景雜波為均勻分布的,則圖像背景雜波的概率密度服從均值為μ方差為σ2的高斯分布。即

選擇閾值為T(mén),則虛警率Pf為

通常我們希望虛警率越低越好,設(shè)定Pf≤1 0-6,查表可得

由式(4)可知,只要計(jì)算對(duì)海導(dǎo)航雷達(dá)視頻圖像預(yù)處理后背景圖像的均值和方差,就可以確定出閾值T,使其滿(mǎn)足恒定的低虛警率。
1.2 雙閾值檢測(cè)方法
由對(duì)海雷達(dá)視頻圖像特點(diǎn)和要求分析可知,單獨(dú)進(jìn)行全局閾值處理或者局部閾值處理不能很好地滿(mǎn)足圖像檢測(cè)要求,本文算法將兩者結(jié)合在一起,如圖2所示,首先選擇全局閾值T1,將弱雜波背景去除,得到可能的目標(biāo)點(diǎn);然后對(duì)每個(gè)目標(biāo)進(jìn)行局部閾值處理,選擇閾值T2,進(jìn)一步將目標(biāo)與背景分割。

圖2 雙閾值檢測(cè)算法流程
1.2.1 全局閾值T1
對(duì)于經(jīng)過(guò)預(yù)處理的對(duì)海雷達(dá)視頻圖像,首先進(jìn)行全局閾值處理,即選定一個(gè)門(mén)限閾值T1,對(duì)整幅圖像進(jìn)行式(1)的處理,經(jīng)過(guò)全局閾值處理,得到疑似目標(biāo)。對(duì)海雷達(dá)視頻圖像經(jīng)過(guò)預(yù)處理,理論上圖像僅為背景雜波與目標(biāo)的線性相加。但是由于雷達(dá)成像結(jié)果受距離影響,并且不同環(huán)境的背景復(fù)雜程度不盡相同,不同區(qū)域的背景灰度均值和方差也有較大差別。
為保證目標(biāo)全部檢測(cè)出來(lái),本算法選取均勻背景區(qū)域的均值和方差為參數(shù)求取全局閾值T1。在經(jīng)過(guò)預(yù)處理的對(duì)海雷達(dá)視頻圖像中選取無(wú)目標(biāo)的均勻背景區(qū)域,如圖3所示,分別求取均值和方差,獲得其平均值,以此來(lái)作為系統(tǒng)的全局閾值。

圖3 對(duì)海雷達(dá)視頻圖像
在研究實(shí)驗(yàn)中發(fā)現(xiàn),均勻背景求取的全局閾值與整幅圖像的均值和方差存在關(guān)系。設(shè)全圖的均值為μ1,方差為σ1,獲得全局閾值的公式為T(mén)′=μ1+kσ1,分別取k為2.5,3和3.5,而經(jīng)過(guò)均勻背景選取的全局閾值為T(mén)1。比較25幀圖像處理結(jié)果如圖4所示,當(dāng)k=3時(shí)與T1較為接近。為簡(jiǎn)化算法,選取全圖的均值和方差為參數(shù)設(shè)定全局閾值。


圖4 均勻背景求取全局閾值與全圖均值方差關(guān)系
1.2.2 局部閾值T2
經(jīng)過(guò)全局閾值處理的圖像,濾除了大部分背景雜波,但對(duì)于背景雜波強(qiáng)度大,與目標(biāo)的對(duì)比度小,整體灰度值高的區(qū)域,無(wú)法用取自于均勻背景的全局閾值將其與目標(biāo)分割開(kāi)來(lái)。為使不同背景下的疑似目標(biāo)準(zhǔn)確地檢測(cè)出來(lái),分別求取不同區(qū)域內(nèi)的背景的閾值進(jìn)行處理。
局部閾值選取方法如下:
以疑似目標(biāo)的重心為中心,以其外接最小矩形為保護(hù)窗口,以外接矩形長(zhǎng)寬2倍形成的矩形為目標(biāo)窗口,并以目標(biāo)窗口除保護(hù)窗口之外的區(qū)域?yàn)閰⒖即翱?如圖5所示。本文認(rèn)為參考窗口的區(qū)域?yàn)樵撃繕?biāo)的背景區(qū)域。求取參考窗口的均值和方差,代入式(4),得到局部閾值。對(duì)目標(biāo)窗口進(jìn)行式(1),用閾值進(jìn)行圖像分割,檢測(cè)目標(biāo)特征信息,實(shí)現(xiàn)對(duì)該目標(biāo)的檢測(cè)。依次遍歷所有疑似目標(biāo),即可得到所有目標(biāo)的特征信息,實(shí)現(xiàn)目標(biāo)檢測(cè)。
2 實(shí)驗(yàn)驗(yàn)證
本文采用民用導(dǎo)航雷達(dá)(JRC)采集的圖像作算法驗(yàn)證。圖6為該導(dǎo)航雷達(dá)采集的某幀原始圖像,本文針對(duì)該數(shù)據(jù)用Matlab7.0作數(shù)據(jù)處理。
對(duì)海導(dǎo)航雷達(dá)視頻圖像由于其成像特點(diǎn)和掃描環(huán)境,艦船目標(biāo)存在一定特點(diǎn),由雷達(dá)原始圖像(圖3)可以分析得出:
(1)不同距離、不同環(huán)境下的背景灰度值不同,如圖3中實(shí)驗(yàn)區(qū)域一和實(shí)驗(yàn)區(qū)域二中的背景雜波不同,實(shí)驗(yàn)區(qū)域一背景灰度較為均勻,而實(shí)驗(yàn)區(qū)域二背景區(qū)域雜波較多。
(2)不同距離、不同環(huán)境下目標(biāo)與背景的對(duì)比度不同,如圖3中實(shí)驗(yàn)區(qū)域一和實(shí)驗(yàn)區(qū)域二中的目標(biāo)與背景對(duì)比度不同,實(shí)驗(yàn)區(qū)域一目標(biāo)與背景對(duì)比度高,而實(shí)驗(yàn)區(qū)域二中目標(biāo)與背景對(duì)比度較低。
(3)不同距離、不同環(huán)境下不同目標(biāo)的灰度值也不盡相同,如圖3中實(shí)驗(yàn)區(qū)域一和實(shí)驗(yàn)區(qū)域二中的目標(biāo)灰度值不同。相似背景區(qū)域內(nèi)不同目標(biāo)的灰度值也不相同。
由于圖像數(shù)據(jù)量較大,僅展示部分切片的處理結(jié)果。從工程使用角度出發(fā),本文對(duì)雷達(dá)圖像數(shù)據(jù)分別進(jìn)行全局最優(yōu)閾值Otsu算法和本文算法進(jìn)行處理,便于分析比較。
為保證實(shí)驗(yàn)效果,本文選取圖3中均勻背景區(qū)域和強(qiáng)干擾背景區(qū)域的目標(biāo)分別進(jìn)行全局最優(yōu)閾值Otsu算法和本文算法進(jìn)行處理,結(jié)果展示如圖6~14所示。
由圖6到圖14可以看出:
(1)經(jīng)過(guò)全局閾值處理,均勻背景區(qū)域的目標(biāo)能較好地與背景分割開(kāi)來(lái),實(shí)現(xiàn)目標(biāo)檢測(cè);而強(qiáng)干擾背景區(qū)域的目標(biāo)淹沒(méi)在強(qiáng)干擾背景中,無(wú)法與背景分割實(shí)現(xiàn)目標(biāo)檢測(cè)。
(2)經(jīng)過(guò)局部閾值處理,均勻背景區(qū)域的目標(biāo)變化不大,依然保持原有的目標(biāo)形態(tài)特征,邊緣清晰,細(xì)節(jié)明顯,能進(jìn)行圖像分割實(shí)現(xiàn)目標(biāo)檢測(cè);強(qiáng)干擾背景區(qū)域的目標(biāo)能夠從強(qiáng)干擾背景中分離出來(lái),邊緣明顯,能進(jìn)行圖像分割實(shí)現(xiàn)目標(biāo)檢測(cè)。
(3)經(jīng)過(guò)Otsu算法處理,均勻背景區(qū)域的目標(biāo)能較好地實(shí)現(xiàn)目標(biāo)檢測(cè),但是強(qiáng)干擾背景區(qū)域的目標(biāo)淹沒(méi)在背景中,無(wú)法與背景分割實(shí)現(xiàn)目標(biāo)檢測(cè)。而本文算法能實(shí)現(xiàn)不同背景區(qū)域內(nèi)的目標(biāo)檢測(cè),優(yōu)于Otsu算法。
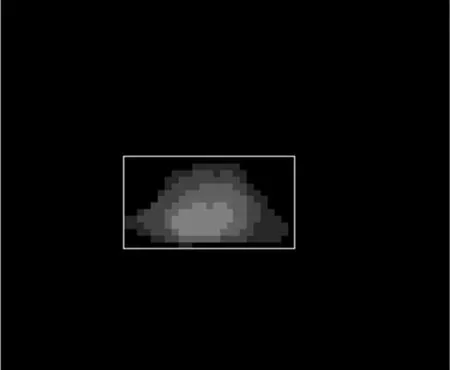
圖6 均勻背景區(qū)域目標(biāo)原始圖像

圖7 均勻背景區(qū)域目標(biāo)經(jīng)過(guò)Otsu算法檢測(cè)

圖8 均勻背景區(qū)域目標(biāo)經(jīng)過(guò)全局閾值檢測(cè)
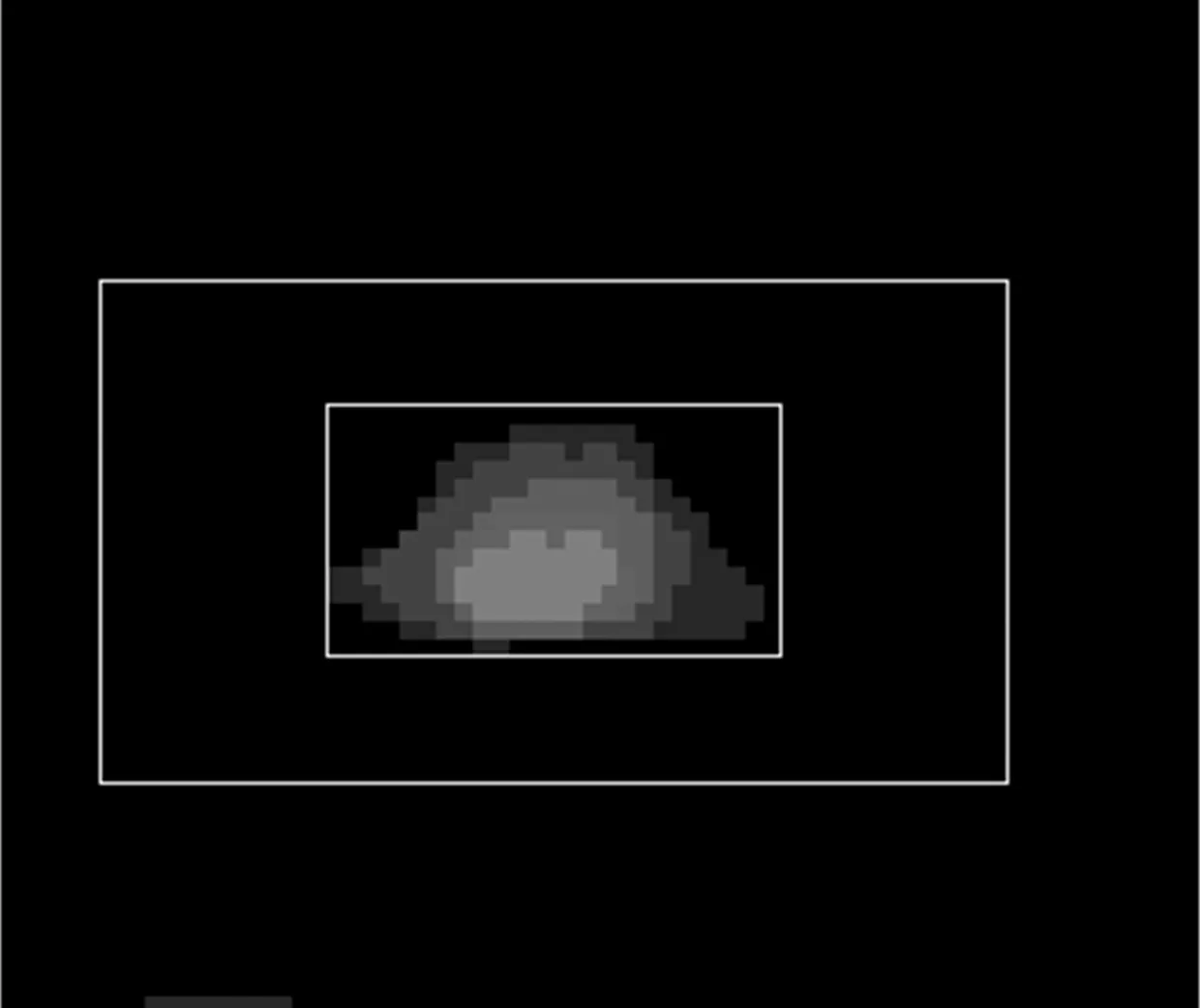
圖9 均勻背景區(qū)域目標(biāo)經(jīng)過(guò)局部閾值檢測(cè)
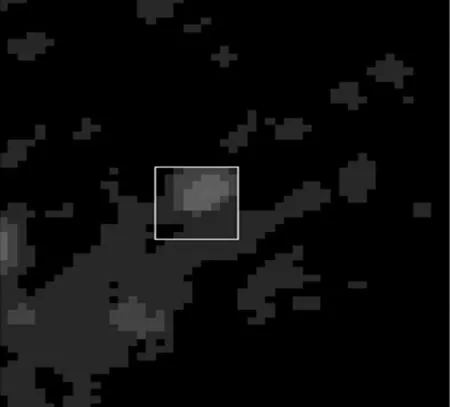
圖10 雜波背景區(qū)域目標(biāo)原始圖像

圖11 雜波背景區(qū)域目標(biāo)經(jīng)過(guò)Otsu算法檢測(cè)

圖12 雜波背景區(qū)域目標(biāo)經(jīng)過(guò)全局閾值檢測(cè)

圖13 雜波背景區(qū)域目標(biāo)經(jīng)過(guò)局部閾值檢測(cè)

圖14 基于恒虛警率的雙閾值檢測(cè)算法處理結(jié)果
3 結(jié)束語(yǔ)
本文提出了一種基于恒虛警率的雙閾值目標(biāo)檢測(cè)方法。針對(duì)對(duì)海導(dǎo)航雷達(dá)視頻圖像特點(diǎn)和處理要求,在保證低虛警率要求的前提下結(jié)合全局閾值處理和局部閾值處理思路,用雙閾值處理方法解決不同背景下目標(biāo)的檢測(cè)問(wèn)題。經(jīng)過(guò)實(shí)測(cè)數(shù)據(jù)的驗(yàn)證,本算法簡(jiǎn)單快速,檢測(cè)精度高,滿(mǎn)足對(duì)海導(dǎo)航雷達(dá)視頻圖像目標(biāo)檢測(cè)處理要求。
[1]艾加秋.基于灰度相關(guān)性的SAR圖像聯(lián)合CFAR艦船檢測(cè)算法[J].雷達(dá)科學(xué)與技術(shù),2014,12(2):149-155,160.
[2]孫宏巖.基于邊緣特征的SAR圖像目標(biāo)檢測(cè)方法[J].雷達(dá)科學(xué)與技術(shù),2013,11(5):462-468.
[3]徐蔚然.基于視頻處理的雷達(dá)圖像目標(biāo)檢測(cè)與跟蹤研究[D].大連:大連理工大學(xué),2000.
[4]GONZALEZ R C,WOODS R E.Digital Image Processing[M].2nd ed.[S.l.]:[s.n.],2007:305-307.
[5]章毓晉.圖像分析[M].2版.北京:清華大學(xué)出版社,2005:73-136.
[6]高晶,孫繼銀,吳昆,等.基于形狀特征的紅外目標(biāo)檢測(cè)方法[J].激光與紅外,2013,43(1):49-53.
[7]張永,劉巧玲.基于自適應(yīng)閾值的運(yùn)動(dòng)目標(biāo)檢測(cè)方法[J].計(jì)算機(jī)工程與應(yīng)用,2012,50(12):166-168.
[8]楊斯涵.基于自適應(yīng)尺度的小目標(biāo)檢測(cè)方法[J].光電工程,2014,41(4):9-16.
[9]王瑩瑩,何蘋(píng),李永賓,等.基于屬性直方圖的快速Otsu紅外目標(biāo)檢測(cè)算法[J].激光與紅外,2014,44(5):577-582.
猜你喜歡
汽車(chē)工程師(2021年12期)2022-01-17 02:29:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
貴州師范學(xué)院學(xué)報(bào)(2016年4期)2016-12-01 03:54:07
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
