機(jī)動目標(biāo)無源跟蹤IMM-MKF算法?
2015-01-23 02:48:04
雷達(dá)科學(xué)與技術(shù) 2015年2期
(海軍航空工程學(xué)院電子信息工程系,山東煙臺264001)
0 引言
現(xiàn)代高科技局部戰(zhàn)爭的經(jīng)驗(yàn)表明,制空權(quán)和信息快速獲取能力已成為決定戰(zhàn)爭勝負(fù)最為關(guān)鍵的兩個因素,兩者密不可分。在這種背景下,多站尤其是運(yùn)動多站無源定位跟蹤系統(tǒng)[1-2]因?yàn)榫哂行畔⑷诤夏芰Α㈦[蔽性好、機(jī)動性強(qiáng)、探測距離遠(yuǎn)等優(yōu)點(diǎn),已成為獲取戰(zhàn)場信息的重要手段,獲取戰(zhàn)場中機(jī)動目標(biāo)的狀態(tài)信息是一個難點(diǎn)。
目前對機(jī)動目標(biāo)的跟蹤多采用交互式多模型結(jié)構(gòu),研究的重點(diǎn)在于模型集的選擇和與模型集對應(yīng)的濾波算法性能的改進(jìn)[3-6]。本文對后者進(jìn)行研究。
目前,非線性濾波算法主要有三類:一是基于局部線性化的擴(kuò)展卡爾曼濾波(EKF)類算法[7]。當(dāng)系統(tǒng)方程非線性程度較高時EKF類算法線性化誤差大,跟蹤性能不穩(wěn)定。二是基于確定性采樣點(diǎn)的sigma點(diǎn)卡爾曼濾波算法,包括不敏卡爾曼濾波(UKF)[8-9]算法、容積卡爾曼濾波(CKF)算法[10]等。這類算法采用一組帶有權(quán)值的確定性采樣點(diǎn)來近似統(tǒng)計(jì)量的均值和方差信息,可視為EKF算法的改進(jìn),目前應(yīng)用比較廣泛,盡管跟蹤精度有所提高,不過仍未解決EKF類算法的缺點(diǎn)。三是基于隨機(jī)采樣點(diǎn)的粒子濾波類算法[11]。盡管理論上粒子濾波類算法能很好地近似后驗(yàn)概率密度函數(shù),但這需要無窮多隨機(jī)采樣點(diǎn),實(shí)際應(yīng)用中只能選擇有限的采樣點(diǎn)且存在粒子退化現(xiàn)象,導(dǎo)致粒子濾波算法計(jì)算量大且跟蹤性能不理想。
為了更好地利用sigma點(diǎn)卡爾曼濾波算法的確定采樣點(diǎn),文獻(xiàn)[12]提出了一種新的變換即邊緣化變換(MT)來計(jì)算隨機(jī)變量的前兩階矩信息(均值和方差)。邊緣化變換采用與UKF算法或者CKF算法相同的sigma點(diǎn),不過將非線性函數(shù)建模為隨機(jī)過程并進(jìn)一步將其描述為一系列Hermite多項(xiàng)式的線性組合,從而可以得到均值和方差的解析閉式解,保證了協(xié)方差矩陣的半正定性。MT假設(shè)Hermite多項(xiàng)式的系數(shù)具有分級先驗(yàn)分布,這些系數(shù)的后驗(yàn)概率分布可以通過變換后的sigma點(diǎn)求出,對系數(shù)進(jìn)行積分可以消除其影響從而解析計(jì)算出變換后的均值和方差信息。
本文將MT應(yīng)用于狀態(tài)更新過程,提出了基于MKF的新的運(yùn)動多站無源跟蹤算法,將其與IMM結(jié)合來實(shí)現(xiàn)對機(jī)動目標(biāo)的高精度跟蹤,并對其性能進(jìn)行了仿真分析。
1 機(jī)動目標(biāo)跟蹤模型
考慮具有如下Markov跳變線性系統(tǒng)的機(jī)動目標(biāo)狀態(tài)估計(jì)問題。

式中,X k和Z k分別表示k時刻目標(biāo)的狀態(tài)及運(yùn)動觀測站獲得的觀測量(本文采用的觀測量為角度),表示k-1時刻目標(biāo)按第i個模型運(yùn)動時的狀態(tài)轉(zhuǎn)移矩陣,h k為與目標(biāo)狀態(tài)及觀測站狀態(tài)有關(guān)的非線性函數(shù),過程噪聲與測量噪聲w k~N(0,R)相互獨(dú)立。假設(shè)目標(biāo)在N個模型之間依Markov鏈進(jìn)行轉(zhuǎn)移,轉(zhuǎn)換概率已知且k-1時刻模型轉(zhuǎn)移到k時刻模型j(記為
2 IMM-MKF算法
2.1 MKF算法
假設(shè)已知N個模型的初始狀態(tài)估計(jì)都為E[X0],初始協(xié)方差矩陣估計(jì)P0=E[(X0-對k∈{1,…,∞},因?yàn)闋顟B(tài)方程為線性,在最小均方根誤差(MMSE)準(zhǔn)則下卡爾曼濾波(KF)是最優(yōu)濾波器,因此對第i個模型而言狀態(tài)預(yù)測過程通過KF來實(shí)現(xiàn),即

量測方程為非線性,本文采用M T來實(shí)現(xiàn)狀態(tài)更新,具體步驟為:
1)選擇先驗(yàn)分布矩陣Σ,該矩陣是p×p的對角矩陣(p≤5),對角元素至少兩個非零。先驗(yàn)矩陣為對角矩陣是因?yàn)榧僭O(shè)θj的各個元素服從高斯分布且相互獨(dú)立。p≤5是因?yàn)镸 T最多能夠準(zhǔn)確積分直到5階的多項(xiàng)式。
2)產(chǎn)生2n+1個sigma點(diǎn)χ=[X0,X1,…,X2n],即


式中,w和C為Hermite基函數(shù)的均值和協(xié)方差矩陣,C為對角矩陣,其對角元素如式(7)所示,H(χ)為在各sigma點(diǎn)處計(jì)算的Hermite多項(xiàng)式,Pθ|z為加權(quán)矩陣θ的后驗(yàn)分布。式(6)~式(9)在遞推過程中為常量,可以提前計(jì)算,從而大大減小算法計(jì)算量。
4)求解變換后的sigma點(diǎn)即根據(jù)χ計(jì)算的觀測量點(diǎn)集

5)計(jì)算k時刻觀測量的一步預(yù)測值^Z k|k-1

6)估計(jì)θi,j先驗(yàn)分布中的比例因子αj,用眾數(shù)作為其估計(jì)值,即

7)計(jì)算觀測量一步預(yù)測值的協(xié)方差矩陣


權(quán)增益及狀態(tài)更新過程與KF相同
通過上面推導(dǎo)可知,與EKF算法、UKF算法及CKF算法相比,MKF算法也保持了KF算法的結(jié)構(gòu),不同的是在對均值及協(xié)方差矩陣的估計(jì)上。
2.2 IMM-MKF算法流程
令k-1時刻第i個模型的模型概率為狀態(tài)估計(jì)為狀態(tài)估計(jì)協(xié)方差矩陣為,則從k時刻起IM M-MKF算法的計(jì)算流程為:


2)對k-1時刻狀態(tài)及其協(xié)方差估計(jì)的混合。k-1時刻與第j個模型匹配的MKF算法的混合初始估計(jì)為
3)濾波。k時刻得到觀測量z k后,將和作為此時與第j個模型匹配的MKF算法的輸入,進(jìn)行濾波得到k時刻狀態(tài)估計(jì)及其協(xié)方差估計(jì)計(jì)算模型似然概率


式中,c為歸一化常數(shù),且
5)狀態(tài)及協(xié)方差融合估計(jì)。按模型概率對N個模型輸出的狀態(tài)估計(jì)進(jìn)行加權(quán)可得k時刻對目標(biāo)的狀態(tài)估計(jì)為
需要注意的是,步驟5)只是輸出最終結(jié)果,不參與IMM算法的遞推過程。
3 算法仿真
以三機(jī)只測角跟蹤為例對IMM-MKF算法的性能進(jìn)行仿真分析。3架飛機(jī)作勻速直線運(yùn)動且初始狀態(tài)分別為(-15 km,0 km,0 m/s,300 m/s)、(0 km,0 km,0 m/s,300 m/s)和(15 km,0 km,0 m/s,300 m/s)。目標(biāo)機(jī)動,初始狀態(tài)為(60 km,80 km,-200 m/s,-100 m/s),前90 s作帶有加速度擾動的勻速直線運(yùn)動,加速度擾動噪聲標(biāo)準(zhǔn)差91~120 s作轉(zhuǎn)彎率為-0.1 rad/s的勻轉(zhuǎn)彎運(yùn)動,加速度擾動噪聲標(biāo)準(zhǔn)差121~200 s重作帶有加速度擾動的勻速直線運(yùn)動。三機(jī)測角標(biāo)準(zhǔn)差相同,都為0.5°;觀測時間間隔Ts=1s,連續(xù)觀測200s;兩個模型的初始模型概率相等,即μ1=μ2=0.5,模型概率轉(zhuǎn)移矩陣各算法初始化都假設(shè)目標(biāo)相對第一個觀測站的徑向距離在0~400 km內(nèi)服從均勻分布,目標(biāo)沿x軸和y軸的速度分量在-500~500 m/s內(nèi)服從均勻分布,結(jié)合第一個觀測站初始時刻角度測量值及均勻分布的統(tǒng)計(jì)特性可得目標(biāo)的初始狀態(tài)估計(jì)。對各算法200次蒙特卡洛實(shí)驗(yàn)結(jié)果進(jìn)行統(tǒng)計(jì)可得位置RMSE及模型概率估計(jì)(以模型2為例)如圖1和圖2所示。
從圖1和圖2可以看出,將IMM結(jié)構(gòu)和MKF算法結(jié)合的思想是有效的。圖1中盡管各種算法跟蹤性能趨于一致,但I(xiàn)MM-MKF算法收斂速度快,在跟蹤初期就具有很高的跟蹤精度,從而能為指揮員提供快速、高精度的目標(biāo)指示結(jié)果。從圖1還可以看出IMM-MKF算法在跟蹤初期就很平穩(wěn),說明MKF算法對模型交互的穩(wěn)定性。此外,從圖2可以看出IMM-MKF算法能夠更準(zhǔn)確地估計(jì)出模型的概率。
需要說明的是,盡管推導(dǎo)過程復(fù)雜,MKF算法的最終形式很簡潔,很多矩陣可以事先計(jì)算并存儲,計(jì)算量較小,便于工程實(shí)現(xiàn)。
4 結(jié)束語
本文將邊緣化變換(MT)引入狀態(tài)更新過程,提出了新的跟蹤算法即MKF算法,并將其與交互式多模型結(jié)合,提出了用于跟蹤機(jī)動目標(biāo)的IMMMKF算法。仿真結(jié)果表明,上述改進(jìn)思想是有效的,在本文的仿真場景中取得了比已有典型IMM算法更好的跟蹤性能,為解決機(jī)動目標(biāo)的穩(wěn)健跟蹤提供了新的解決思路。
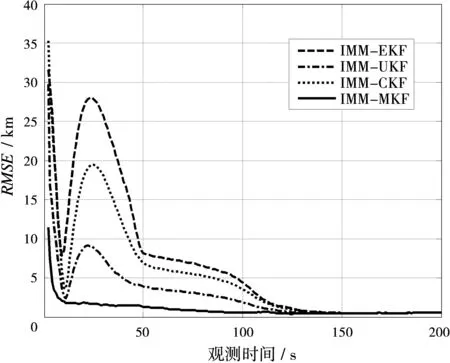
圖1 不同機(jī)動目標(biāo)跟蹤算法性能比較圖
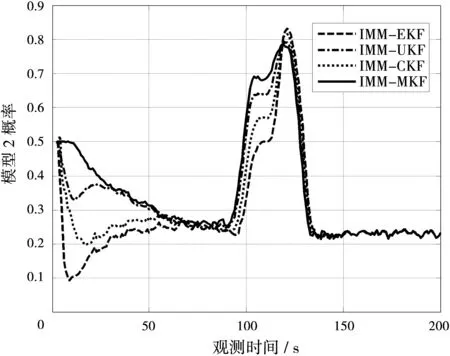
圖2 模型估計(jì)概率示意圖
[2]蘇峰,王昌海,徐征.基于最小二乘的時差定位算法[J].雷達(dá)科學(xué)與技術(shù),2013,11(6):621-625,632.SU Feng,WANG Chang-hai,XU Zheng.TDOA Location Algorithms Based on the Least Squares[J].Radar Science and Technology,2013,11(6):621-625,632.(in Chinese)
[3]陳玲,李少洪.基于無源時差定位系統(tǒng)的機(jī)動目標(biāo)跟蹤算法[J].系統(tǒng)工程與電子技術(shù),2005,27(1):127-130.
[4]焦淑紅,劉申建,司錫才.機(jī)動目標(biāo)時差無源定位自適應(yīng)濾波算法研究[J].哈爾濱工程大學(xué)學(xué)報(bào),2001,22(5):57-61.
[5]宋驪平,姬紅兵,高新波.多站測角的機(jī)動目標(biāo)最小二乘自適應(yīng)跟蹤算法[J].電子與信息學(xué)報(bào),2005,27(5):793-796.
[6]徐本連,王執(zhí)銓.一種新的雙基陣純方位機(jī)動目標(biāo)跟蹤算法[J].南京理工大學(xué)學(xué)報(bào),2006,30(2):142-146.
[7]FENG D W,LI T,HUANG Z T.Square-Root Second-Order Extended Kalman Filter and Its Application in Target Motion Analysis[J].IET Radar,Sonar&Navigation,2010,4(3):329-335.
[8]ZHAN R H,WAN J W.Iterated Unscented Kalman Filter for Passive Target Tracking[J].IEEE Trans on Aerospace and Electronic Systems,2007,43(3):1155-1163.
[9]DUNíK J,ˇSIMANDL M,STRAKA O.Unscented Kalman Filter:Aspects and Adaptive Setting of Scaling Parameter[J].IEEE Trans on Automatic Control,2012,57(9):2411-2416.
[10]ARASARATNAM I,HAYKIN S.Cubature Kalman Filters[J].IEEE Trans on Automatic Control,2009,54(6):1254-1269.
[11]RISTIC B,ARULAMPALAM S,GORDON N.Beyond the Kalman Filter:Particle Filters for Tracking Applications[M].London:Artech House,2004.
[12]SANDBLOM F,SVENSSON L.Moment Estimation Using a Marginalized Transformation[J].IEEE Trans on Signal Processing,2012,60(12):6138-6150.
[13]JULIER S J.The Scaled Unscented Transformation[C]∥Proceedings of the American Control Conference,[S.l]:[s.n.],2002:4555-4559.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
測控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
電源技術(shù)(2016年9期)2016-02-27 09:05:39
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
