基于分坐標濾波的隱身目標協同跟蹤方法研究
2014-12-31 11:57:42王明宇萬夕干
上海航天 2014年6期
王 馨,王明宇,萬夕干
(1.空軍工程大學 防空反導學院,陜西 西安 710051;2.中國人民解放軍駐上海航天電子技術研究所軍事代表室,上海 201109)
0 引言
隨著新型隱身技術的廣泛應用,舊有的雷達系統已難以滿足現代空防戰爭的需要,研究和發展針對隱身目標的跟蹤技術逐步成為現代雷達發展的重要方向。文獻[1]用自適應濾波算法較好地處理了跟蹤速度和跟蹤誤差精度的問題;文獻[2-3]用檢測前跟蹤方法,通過非相干積累等技術提高了雷達的檢測性能。但上述算法均未對隱身目標跟蹤的連續性和穩定性進行分析。為此,本文基于典型隱身目標雷達散射截面(RCS)分布特性,討論了VHF,X頻段雷達的跟蹤性能,并針對由于目標強起伏引起的跟蹤中斷、不穩定等問題,提出了一種基于分坐標濾波的數據融合算法。
1 問題描述
基于F-22飛機全金屬縮比模型,不考慮表面涂層,在VHF,X兩個典型頻段用FEKO電磁仿真軟件計算得到的前向靜態RCS結果如圖1所示[4]。
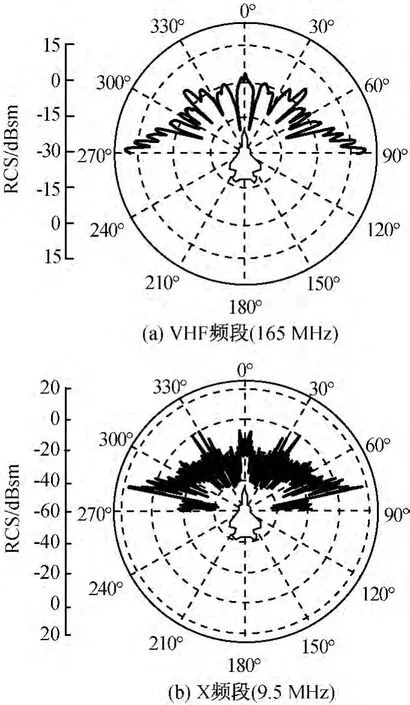
圖1 F-22飛機全空域RCS仿真計算結果Fig.1 RCS simulation result of F-22plane in whole airspace
由圖1可知:F-22飛機在高頻段的RCS水平明顯小于普通戰斗機,并呈現明顯的各向不一致性,其中機頭方向隱身性能最好,并隨方向變化強烈起伏;在VHF低頻段,由于雷達探測波長接近目標外形結構尺寸,隱身效果變差,其RCS大幅增加,甚至超過普通戰斗機,同時其各向不一致性和起伏也明顯減弱,但存在較低頻率的隨角度起伏。基于上述靜態RCS的計算結果,在雷達對RCS為1m2目標的額定發現距離R0=300km(虛警概率Pf0=10-6,發現概率Pd0=0.5)的條件下,對航線1、2(飛行速度500m/s,高度10km,航路捷徑20,100km)和航線 3、4(飛行速度 500m/s,高度10km,轉彎半徑10,50km)的VHF,X頻段雷達的跟蹤性能進行仿真計算,結果分別如圖2、3所示。
由仿真結果可發現現象和規律如下:
a)VHF頻段雷達的目標跟蹤質量明顯優于X頻段雷達,即使在大航路捷徑、目標大幅度機動的情況下,其跟蹤距離、跟蹤連續性均接近對常規目標的探測;
b)在對隱身目標跟蹤過程中,VHF,X頻段雷達均出現了跟蹤中斷,其中X頻段雷達中斷更頻繁;
c)在目標機動飛行時,因其側面暴露于雷達探測,RCS水平較頭部明顯增大,一定程度上利于目標的早發現,但難以形成連續跟蹤。
綜上,隱身目標在縮減其整體RCS水平,有效壓縮高頻段雷達作用距離的同時,其RCS的大幅快速起伏對雷達跟蹤造成了嚴重影響,導致出現頻繁的跟蹤中斷。
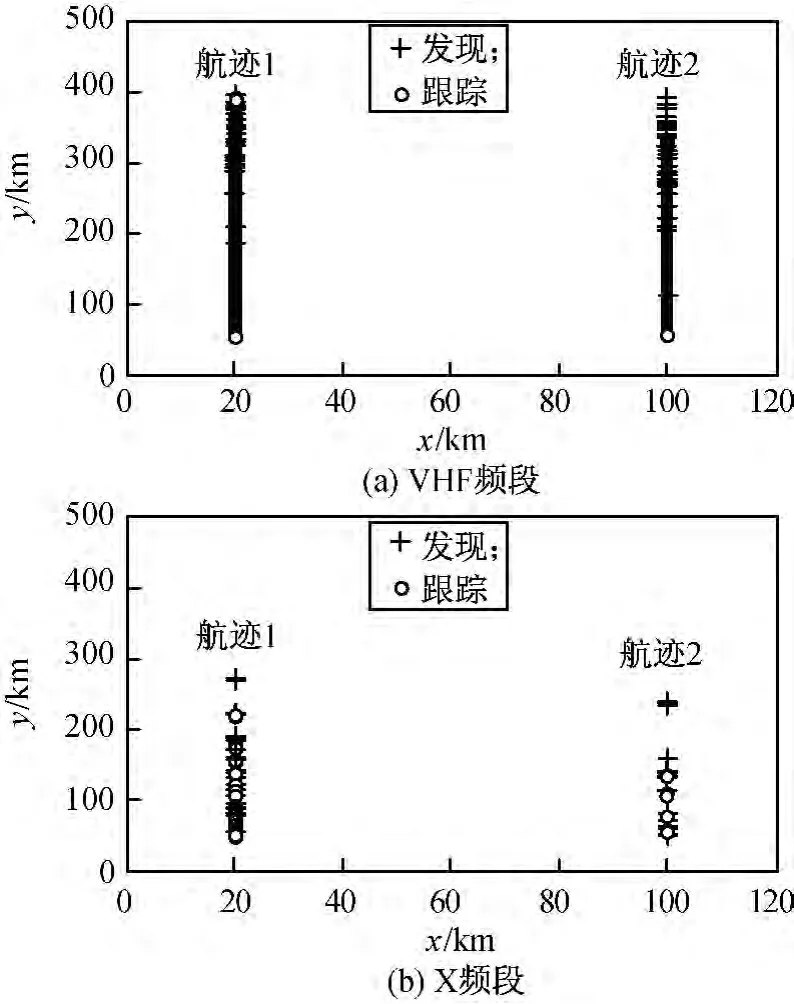
圖2 直線飛行目標跟蹤仿真結果Fig.2 Tracking simulation results for straight target
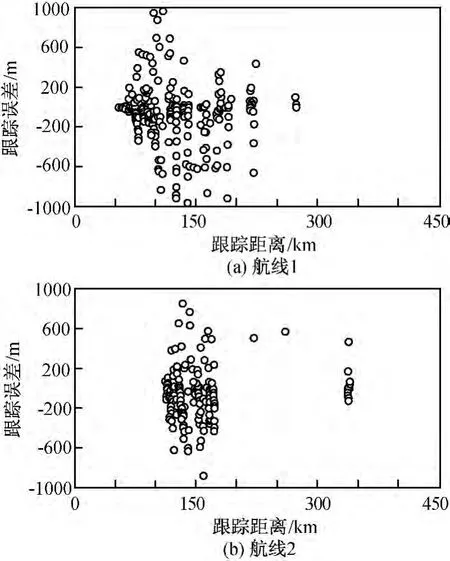
圖3 直線飛行目標X頻段跟蹤誤差Fig.3 Tracking error in X band for straight target
2 基于分坐標濾波的協同跟蹤數據融合算法
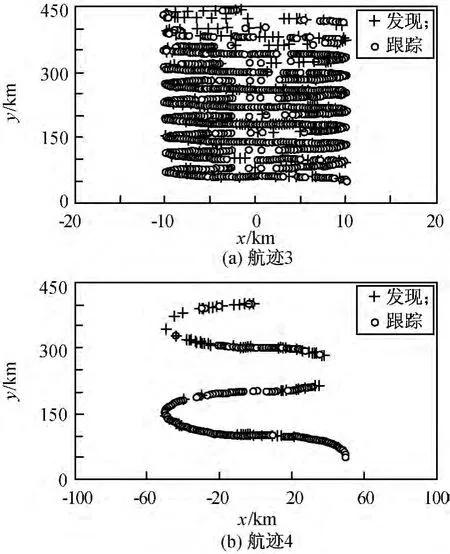
圖4 機動飛行目標VHF頻段航跡跟蹤仿真結果Fig.4 Tracking simulation results in VHF band for maneuvering target
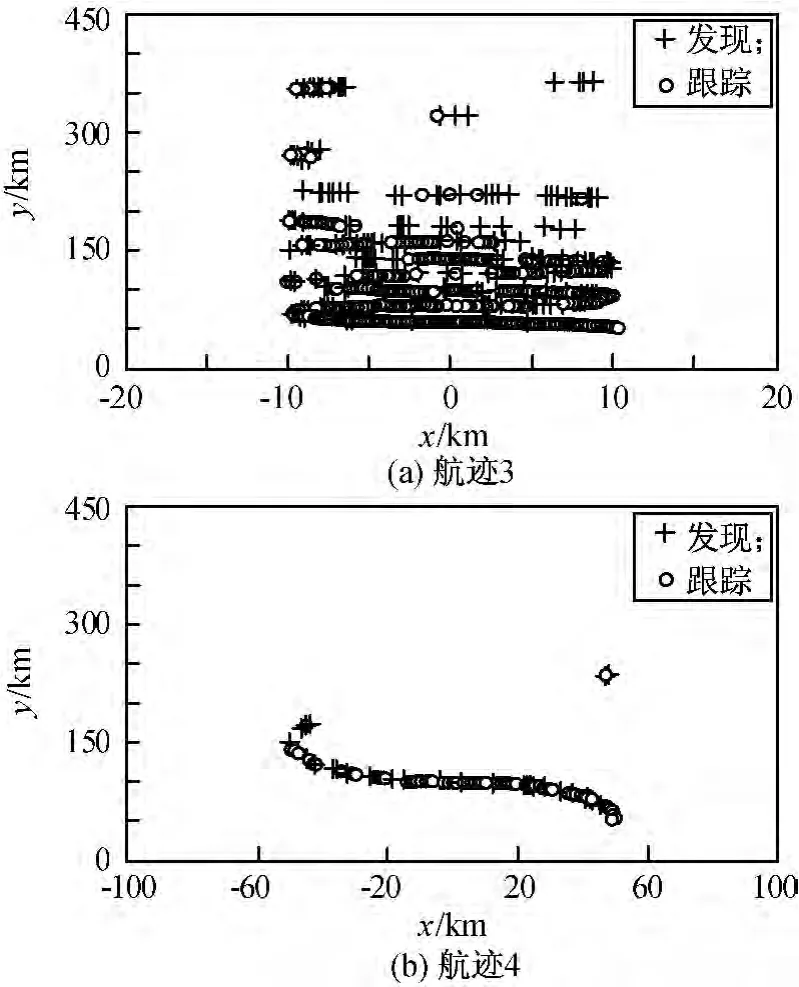
圖5 機動飛行目標X頻段航跡跟蹤仿真結果Fig.5 Tracking simulation results in X band for maneuvering target
分坐標濾波是指雷達利用直接測量得到的角度、距離、速度信息,分別進行各坐標的濾波處理,獲取目標三位坐標跟蹤信息。分坐標濾波的特點是與雷達坐標測量一一對應,可最大程度降低各坐標間的相互影響,即使某一坐標誤差增大甚至完全丟失,也不影響其他坐標的跟蹤。對隱身目標來講,一般認為目標機動不是探測跟蹤的核心問題,其主要矛盾集中在低信噪比、強起伏條件下的有限信息最佳利用,因此采用分坐標濾波處理更有優勢[5]。
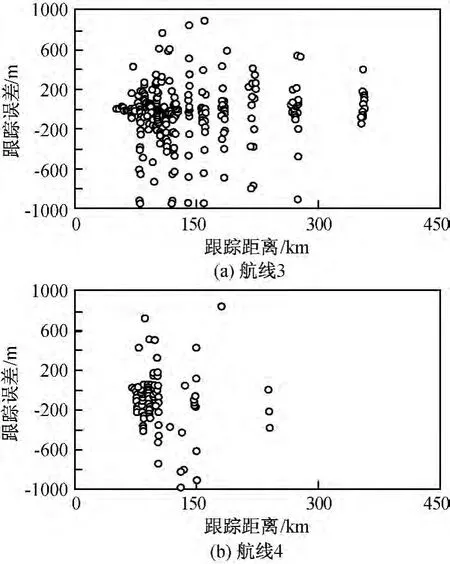
圖6 機動飛行目標X頻段跟蹤誤差Fig.6 Tracking error in X band for maneuvering target
從前述研究結果來看,對典型隱身目標,VHF頻段雷達具有良好的探測能力,其探測距離、跟蹤連續性與常規目標相當;X頻段雷達的作用距離大幅度壓縮,并存在嚴重的跟蹤斷續。在相近的雷達天線物理孔徑條件下,VHF頻段雷達的測量精度遠低于X頻段雷達。即探測能力好的雷達精度差,精度好的雷達探測能力不足,協同跟蹤的出發點,正是基于VHF和X頻段雷達能力的這種互補性[6]。
基于VHF頻段雷達和X頻段雷達各1部,構建的多雷達協同跟蹤系統如圖7所示。工作原理如下:先用VHF頻段雷達發現目標并進行邊跟蹤邊搜索(TAS)或邊掃描邊跟蹤(TWS),測得的目標航跡數據實時傳送到X頻段雷達,控制TAS波束照射目標。一般情況下,VHF頻段雷達的角度測量精度為0.5°,只要X頻段雷達的波束寬度達到1.5°,即可保證以99%以上的概率有效覆蓋目標。該過程在VHF頻段雷達發現目標后一直持續,確保目標始終處于X頻段雷達的波束照射范圍內。在X頻段雷達沒有發現有效目標點跡的情況下,其TAS跟蹤器按VHF頻段雷達給出的目標點跡閉合,一旦未發現有效目標點跡,則進行融合處理。這樣即使X頻段雷達發現的目標點跡稀疏或不連續,其TAS跟蹤仍是連續的,只是精度受到一定影響。
此跟蹤模式的最大特點是充分利用VHF,X頻段雷達的觀測信息,有效提高X頻段雷達的作用距離和跟蹤連續性和穩定性,且僅需占用目標TAS目標跟蹤通道1個,其資源占用率通常小于1%。因此,該模式的資源利用效率較常規點跡融合更高,更適于采用TAS跟蹤的高頻段跟蹤雷達。當有2部以上雷達時,上述方法同樣適用。
3 仿真
在前文的4種典型航線和雷達威力條件下,假定兩部雷達同地部署、同步探測,忽略通信傳輸時延的影響,VHF,X波段雷達的角度、距離測量誤差分別為0.5°/150m,0.2°/20m,基于分坐標熵權 α-β濾波的協同跟蹤數據融合算法的處理結果分別如圖8~11所示。
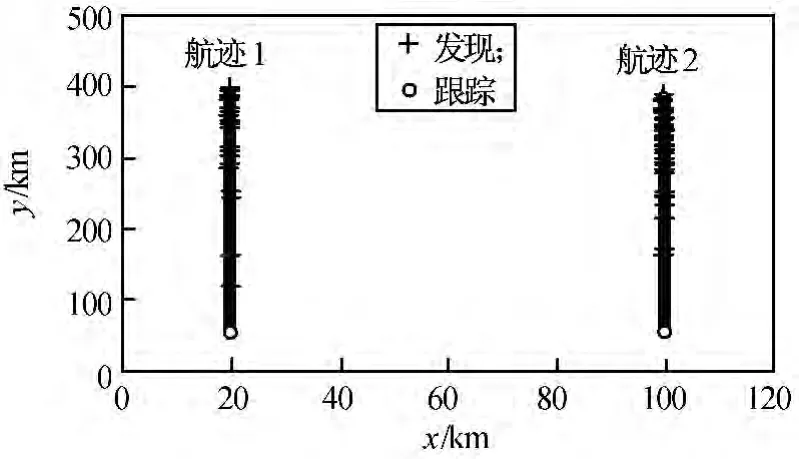
圖8 X波段雷達對直線飛行目標的協同跟蹤輸出航跡Fig.8 Tracking simulation results for straight target of X band radar
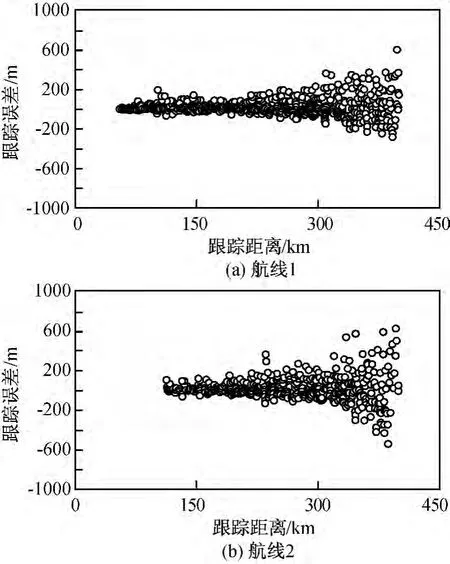
圖9 X波段雷達對直線飛行目標的協同跟蹤誤差Fig.9 Tracking error for straight target of X band radar
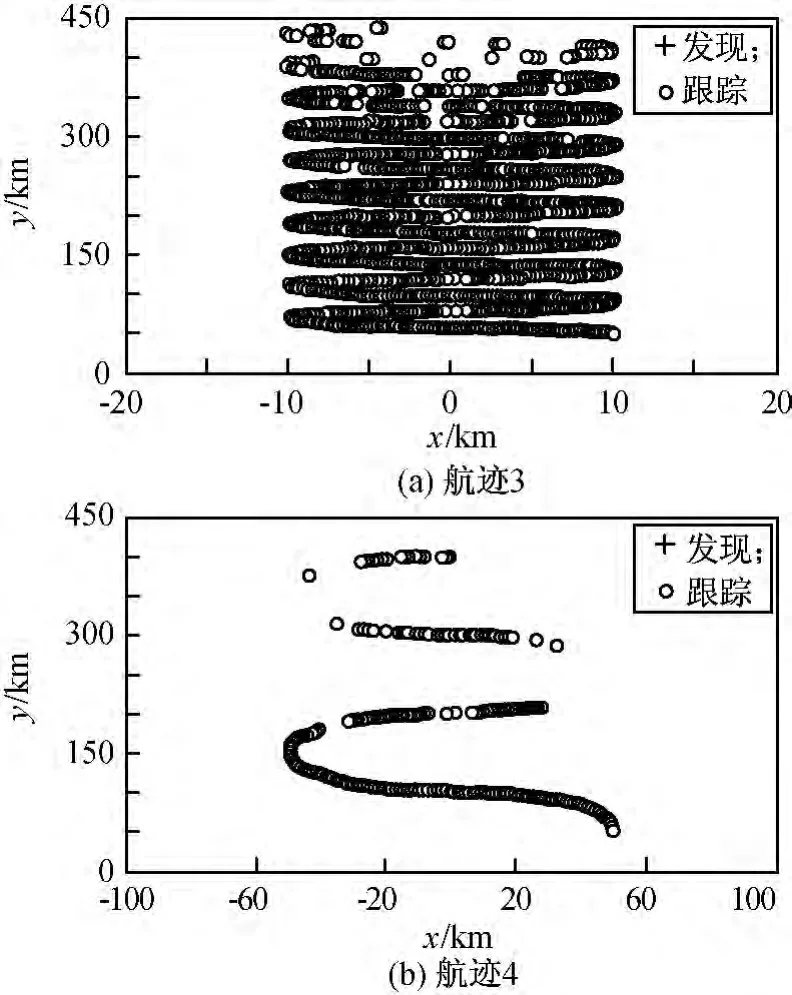
圖10 X波段雷達對機動飛行目標的協同跟蹤航跡輸出Fig.10 Tracking simulation results for maneuvering target of X band radar
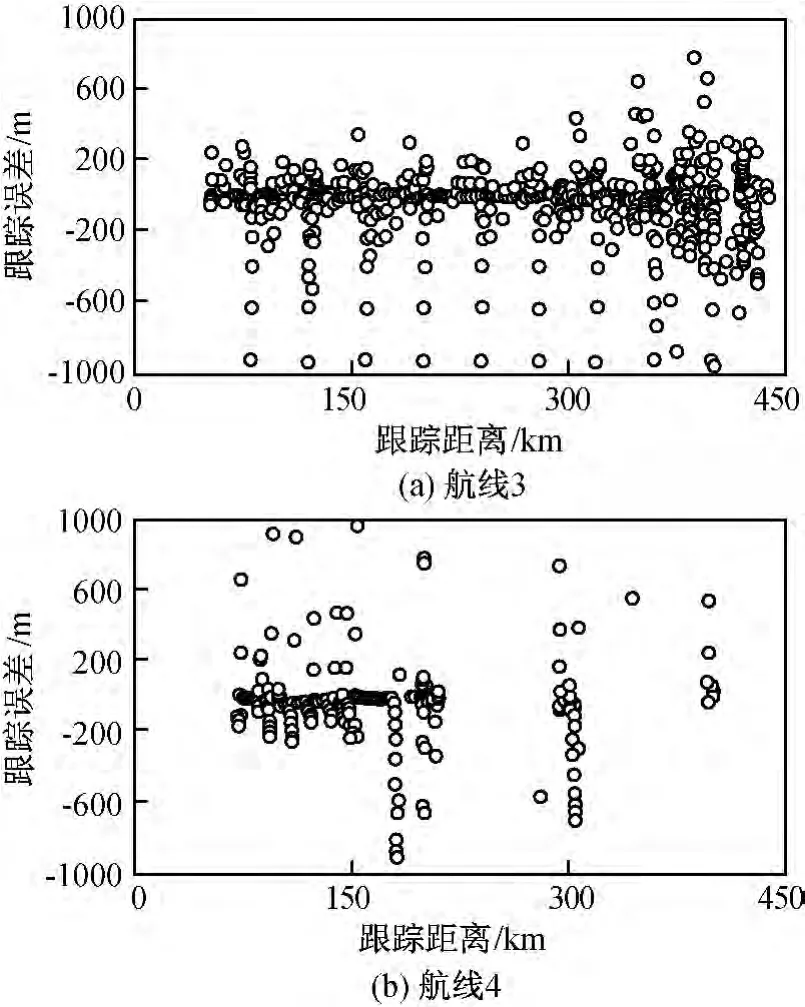
圖11 X波段雷達對機動飛行目標的協同跟蹤誤差Fig.11 Tracking error for maneuvering target of X band radar
由圖8~11可知:采用協同跟蹤數據融合處理后,X波段雷達最遠穩定跟蹤距離分別由90,110,95,75km 提高到300,285,370,175km,跟蹤連續性、穩定性也明顯改善;從其距離跟蹤誤差變化趨勢來看,在跟蹤前段,由于主要依靠VHF的目標點跡,跟蹤誤差較大;隨著距離逐漸變近,X波段出現了零散的目標點跡,跟蹤誤差開始逐步收斂;在近距離段,X波段的目標點跡連續,跟蹤誤差收斂到正常水平,整體跟蹤質量得到了明顯提高。
4 結束語
在反隱身問題上,組網雷達系統本質上是一種資源的高效綜合平臺,可在更廣闊的空間內尋求反隱身技術與策略的最佳組合。本文提出了一種基于分坐標濾波的協同跟蹤數據融合方法,研究表明:該方法在不增加雷達資源需求的前提下,可有效提高X頻段雷達的目標跟蹤距離,以及跟蹤連續性和穩定性,為實現對隱身目標的連續跟蹤和攔截創造有利條件。
[1] 黃 鶴,張會生,許家棟.一種改進的α-β-γ濾波跟蹤算法[J].火力與指揮控制,2008,33(1):94-96.
[2] TONISSEN S M,EVANS R J.Performance of dynamic programming techniques for track before detect[J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(4):1440-1451.
[3] JOHNSTON L A,KRISHNAMURTHY V.Performance analysis of a dynamic programming track before detect algorithm[J].IEEE Transactions on Aerospace and Electronic Systems,2002,38(1):228-242.
[4] 童創明.計算電磁學快速方法[M].西安:西北工業大學出版社,2010.
[5] 楊萬海.空中目標分坐標濾波與參數航跡融合技術研究[D].西安:西安電子科技大學,2012.
[6] 李 偉,柯 濤.雷達組網反隱身可行性仿真分析[J].艦船電子對抗,2010,33(5):83-86.