基于BP 神經網絡的汽車液壓助力轉向系統故障診斷仿真
2014-12-24 08:57:46朱詩順歐陽熙朱道偉駱素君
軍事交通學院學報 2014年8期
朱詩順,歐陽熙,朱道偉,駱素君
(1.軍事交通學院 軍用車輛系,天津300161;2.軍事交通學院 研究生管理大隊,天津300161;3.軍事交通學院 軍事物流系,天津300161)
由于液壓系統故障的隱蔽性、隨機性和交錯性,當系統發生故障時,難以及時對故障點進行準確定位。在對液壓系統故障診斷的研究中發現,利用BP 神經網絡對液壓系統進行故障診斷,可避開模式識別中建模和特征提取的麻煩,較好地克服單純依靠維修人員經驗判別故障的缺點,使故障狀態易于識別。蘇欣平等[1]在液壓馬達故障診斷中,以轉速下降等5 種故障現象作為BP 神經網絡輸入,以馬達內部柱塞與缸的配合不良等5 種故障原因的隸屬度作為BP 神經網絡輸出。但是,此方法存在模糊概念難以準確表達、隸屬函數的生成費時費力等問題,且此方法難以對液壓系統進行實時的故障診斷。曹鳳才等[2]以油缸內泄漏等8 種故障原因作為網絡輸入,正常、輕度故障、故障、重度故障作為網絡輸出。但是,汽車液壓轉向系統各零件相對封閉,不能實現對具體故障點的識別和診斷。鑒于此,本文提出一種利用壓力、流量等實時狀態信息作為輸入,各具體故障模式作為輸出的BP 神經網絡液壓故障診斷方法,實現對汽車液壓助力轉向系統故障快捷診斷。
1 AMESim 液壓系統故障仿真
在汽車液壓助力轉向系統故障實際研究中,由于故障樣本數據相對缺乏,需要在裝備上進行故障模擬,但在技術實現上比較困難。運用AMESim 仿真軟件對液壓系統進行故障仿真建模,在各種故障模式下獲得對應的系統故障樣本實時數據,可為獲取BP 神經網絡故障診斷的訓練樣本和測試樣本奠定基礎。
1.1 汽車液壓助力轉向系統AMESim 仿真模型的建立
利用AMESim 構建的汽車液壓助力轉向系統包括方向盤、扭桿、齒輪齒條、儲油箱、液壓泵、電動機、轉向閥、液壓缸和液壓管路等構件。液壓泵在電動機的作用下,將儲油罐中的液壓油高壓泵入系統中,轉化成液壓能。當方向盤輸出轉動角度時,扭桿轉動,從而給轉向閥轉動信號,轉向閥打開,允許液壓油進入液壓缸,此時液壓油的壓力與轉向閥閥門的開度成正比。液壓油壓力作用在活塞上,產生與壓力成正比的動力。這個動力通過活塞以及與之相連的機械構件(如齒條)傳遞到車輪,實現助力轉向。汽車液壓助力轉向系統AMESim 模型如圖1 所示。
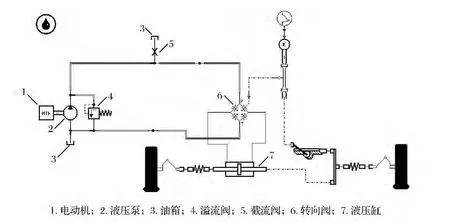
圖1 汽車液壓助力轉向系統AMESim 模型
1.2 汽車液壓助力轉向系統AMESim 模型的故障注入
通過仿真模型參數的修改,對液壓助力轉向系統的故障模式進行仿真,可以方便地考察各種故障現象所對應的參數狀態及其對液壓助力轉向系統的影響。
(1)溢流閥彈簧松動。溢流閥彈簧松動將導致溢流閥開啟壓力降低,即未達到系統工作壓力時,溢流閥便開啟泄壓,圖1 中“4”為溢流閥模塊。
溢流閥的開閉取決于系統壓力與溢流閥開啟壓力的差值dp:

式中:pin為入口處壓力;pout為出口處壓力;pcract為開啟壓力。
pcract的大小可在模型屬性中修改。當dp為正時,溢流閥開啟;當dp為負時,溢流閥關閉。所以,通過修改模型中溢流閥元件的“開啟壓力”屬性,可仿真溢流閥彈簧松動故障模式。
(2)液壓泵轉速不足。通過修改模型中液壓泵元件的“液壓泵轉速”屬性,可模擬液壓泵轉速不足故障模式。
(3)液壓缸內泄漏。液壓缸內泄漏指工作缸與非工作缸之間存在泄漏,使得液壓油在壓力的作用下從工作缸流向非工作缸,圖1 中“7”為液壓缸模塊。在此模塊中,液壓缸內泄漏流量Qleak為

式中:p1為工作缸入口壓力;p2為非工作缸入口壓力;lleak為內泄漏率,L/min/MPa。
lleak的大小可在模型屬性中修改,即通過修改模型中液壓缸元件的“泄漏率”屬性,來模擬液壓缸內泄露故障模式。
(4)系統外泄漏。系統外泄漏指的是液壓油從元件或管路中流到外部。在模型中加入固定節流孔,圖1 中“5”為節流孔模塊。可通過修改流量控制閥模塊的“等效口徑”屬性,來控制液壓油通過液流孔的流量,從而模擬系統外泄漏故障模式[3]。
(5)系統超量進氣。當系統超量進氣時,液壓油的體積彈性模量將大大減小,液壓油的可壓縮性將顯著提高,并將嚴重影響液壓系統的工作性能。所以,通過大幅修改油液屬性中“體積模量”的大小,來模擬系統超量進氣故障模式。
2 基于改進BP 神經網絡的液壓故障診斷
神經網絡工具箱不僅包括常規BP 神經網絡,還包括各種常用的神經網絡改進算法。其中,自適應學習率調整、附加動量的梯度下降法、共軛梯度法、L-M 等4 種方法比較見表1[4]。
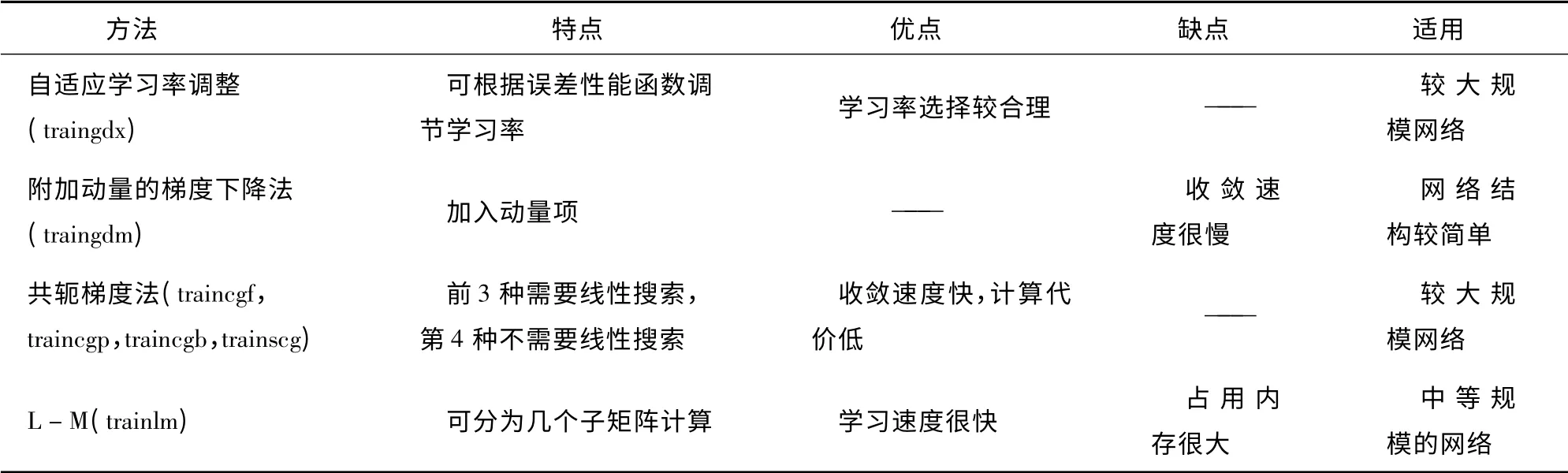
表1 MATLAB 中幾種改進BP 算法比較
針對液壓故障診斷的具體情況,可設計合適的改進BP 神經網絡模型,并將仿真得到的數據作為輸入信息,利用該BP 神經網絡模型對汽車液壓助力轉向系統進行故障診斷。
2.1 液壓故障診斷的BP 模型設計
將AMESim 汽車液壓助力轉向模型中各個故障模式下采集的數據作為輸入信息,分別為液壓閥P 口流量、液壓閥P 口壓力、液壓閥T 口流量、液壓閥T 口壓力、液壓缸左缸流量、液壓缸左缸壓力、液壓缸右缸流量、液壓缸右缸壓力、液壓泵流量、液壓泵壓力,它們向量為X=[x1,x2,x3,x4,x5,x6,x7,x8,x9,x10]。將在AMESim 仿真模型中注入的溢流閥彈簧松動、液壓泵轉速不足、液壓缸內泄露、系統外泄漏、系統超量進氣5 種故障模式以及正常模式作為輸出信息,它們向量為Y =[y1,y2,y3,y4,y5,y6]。
由于在仿真模型中采集了10 個點的狀態信息,所以輸入層的神經元數為10。為了簡化網絡結構,輸出層使用3 個神經元,溢流閥彈簧松動、液壓泵轉速不足、液壓缸內泄露、系統外泄漏、系統超量進氣、正常模式分別表示為(0,0,0),(0,0,1),(0,1,0),(0,1,1),(1,0,0),(1,0,1)。
輸入層到隱層的傳遞函數選為tansig,隱層到輸出層的傳遞函數選為purelin,根據經驗結合實驗,選取隱層節點數為13。在算法改進的選擇上,當選用L-M 改進算法時,此神經網絡收斂速度最快,訓練精度最高,所以,訓練函數用trainlm。
2.2 網絡訓練及測試
根據1.2 中的故障注入,按照故障程度由輕到重,在AMESim 汽車液壓助力轉向系統中設置不同的參數,對5 種故障模式各采集7 組不同狀態數據,將其中4 組作為BP 神經網絡的訓練樣本,另外3 組數據作為測試樣本。訓練樣本和測試樣本分別見表2 和表3。
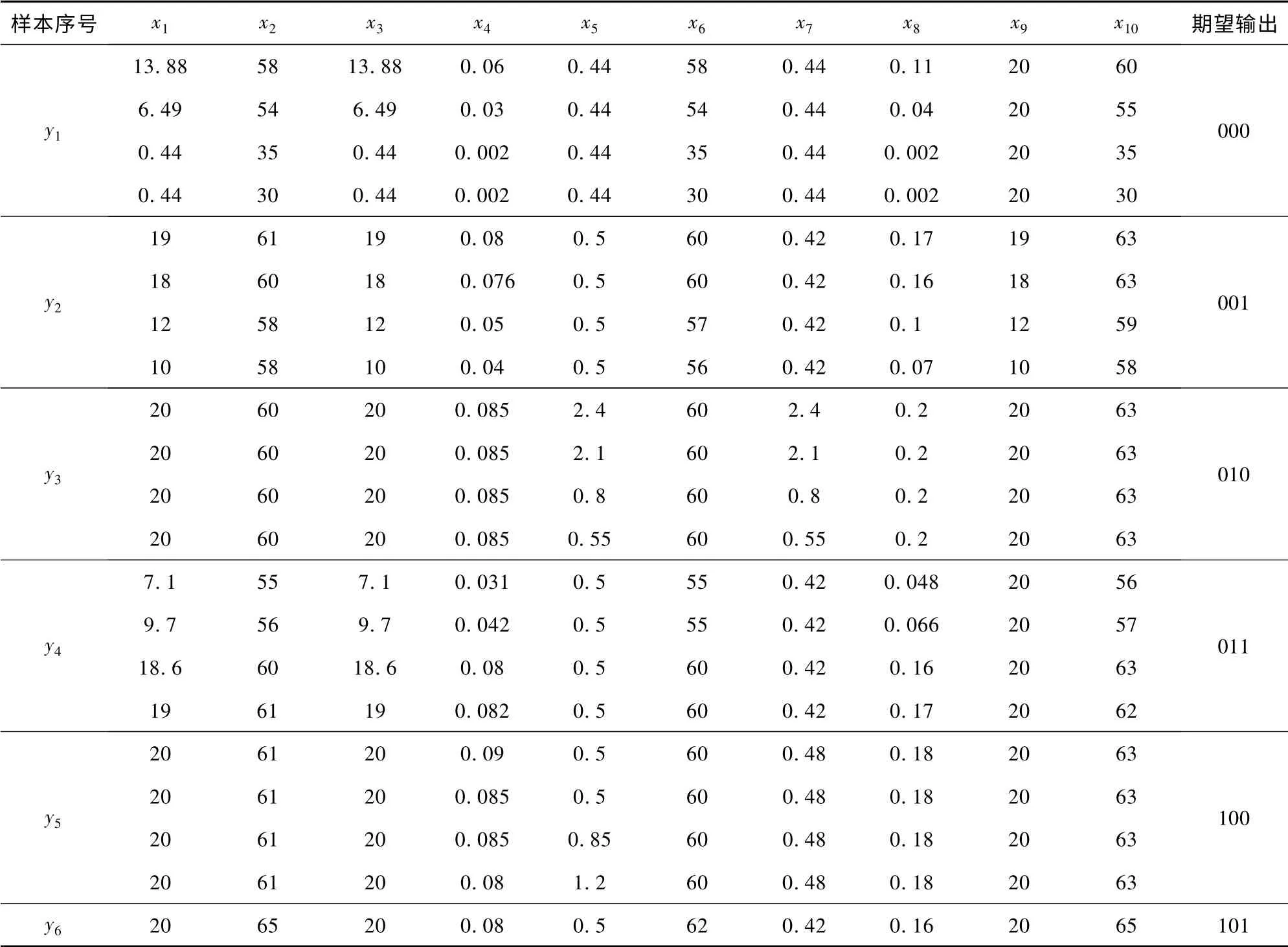
表2 BP 神經網絡訓練樣本
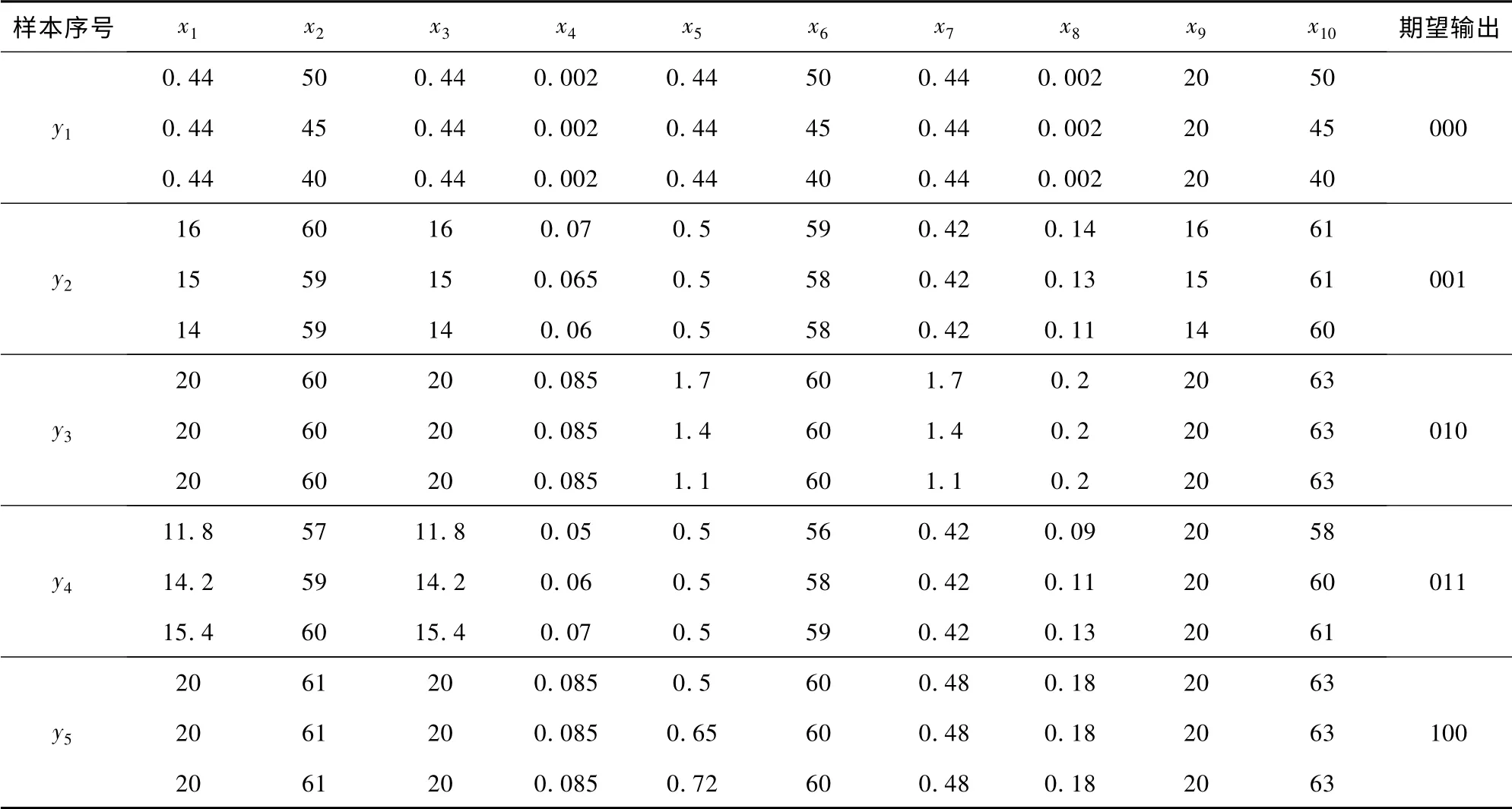
表3 BP 神經網絡測試樣本
經過42 次訓練滿足誤差要求,達到訓練目標。神經網絡訓練完成后,進行測試的期望輸出,其結果見表4,測試樣本的診斷結果見表5,網絡訓練梯度如圖2 所示。
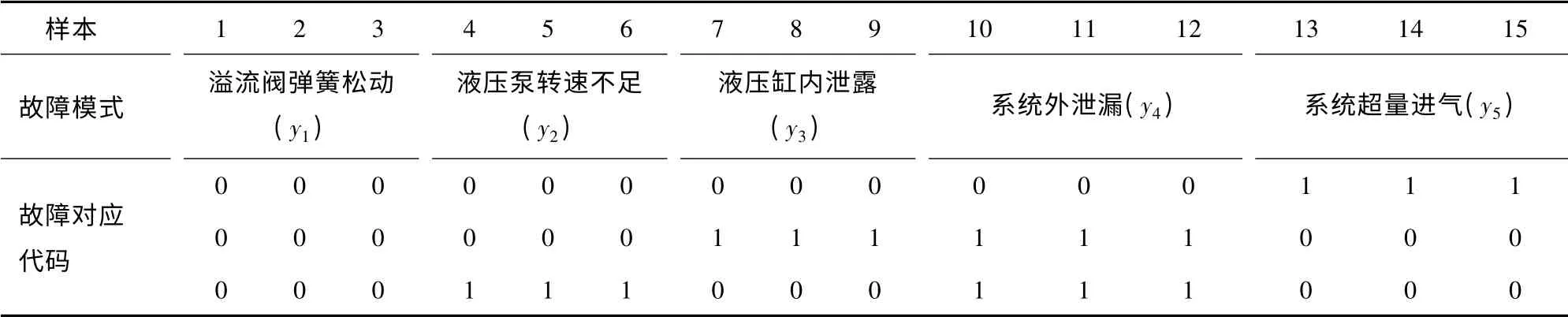
表4 測試樣本期望輸出及對應的故障模式
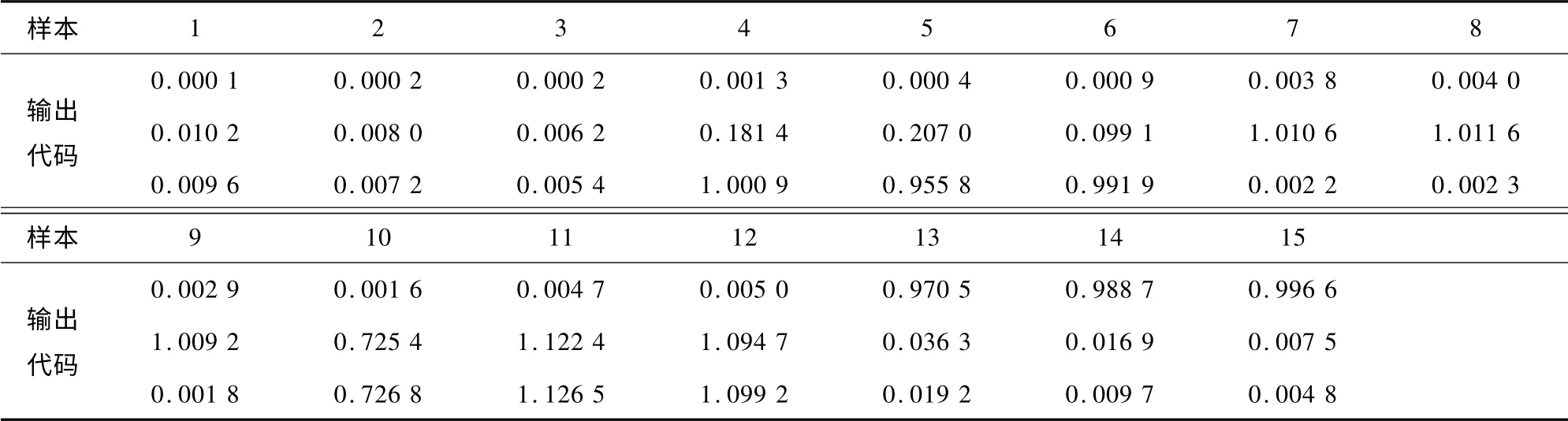
表5 測試樣本診斷結果
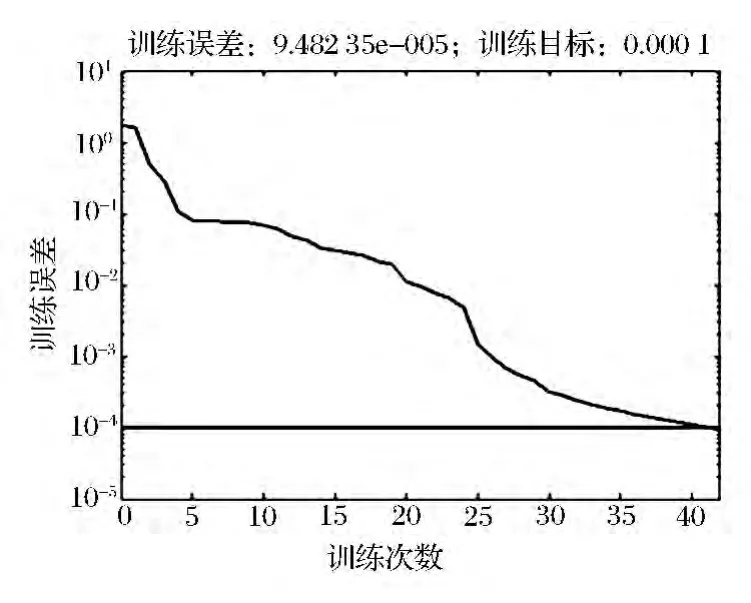
圖2 網絡訓練梯度圖
表5 為測試樣本的診斷結果,即15 組測試樣本對應的診斷結果的代碼。如果診斷準確,則測試樣本診斷結果的代碼將與期望輸出的代碼相吻合。將15 組測試樣本診斷結果的代碼(表5)與期望輸出的代碼(表4)對比,診斷結果平均相對誤差為0.512 4%。測試結果表明,此實時狀態信息作為輸入的改進BP 神經網絡對液壓故障的診斷是準確的。
3 結 論
(1)將壓力、流量等實時狀態信息作為網絡輸入,具體的故障點判斷作為網絡輸出的改進的BP神經網絡,能夠實現對汽車液壓助力轉向系統的故障診斷。仿真表明,診斷比較準確,平均相對誤差為0.512 4%。
(2)利用AMESim 仿真軟件建立仿真模型對汽車液壓助力轉向系統的各故障模式進行仿真,得到相對應的狀態信息,用作BP 神經網絡的輸入信息,對解決液壓助力轉向系統在實際故障樣本數據難以獲得、相對缺乏的問題上有參考意義。
[1] 蘇欣平,解亞,周鑫,等.基于BP 神經網絡的液壓馬達故障診斷[J].中國工程機械學報,2010,10(2):288-231.
[2] 曹鳳才,岳鳳英.基于BP 神經網絡的液壓系統故障診斷研究[J].中北大學學報:自然科學版,2010(31):596-599.
[3] 汪宇亮. 基于AMESim 工程機械液壓系統故障仿真研究[D].武漢:武漢理工大學,2012.
[4] 周黃斌,周永華,朱麗娟. 基于MATLAB 的改進BP 神經網絡的實現與比較[J].計算機技術與自動化,2008,27(11):28-31.
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
汽車維修與保養(2019年7期)2020-01-06 03:30:42
商周刊(2017年17期)2017-09-08 13:08:58
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
