基于MATLAB和Pro/E擺動導桿機構運動學分析和仿真
2014-12-23 06:44:28許華杰馬訓鳴郭帆王韜
機械工程師 2014年6期
許華杰, 馬訓鳴, 郭帆, 王韜
(西安工程大學機電學院,西安710048)
0 引言
擺動導桿機構因具有良好的傳力特性,被廣泛應用于牛頭刨床和渦電流阻尼器壽命測試等機械傳動裝置中,該機構由機架、曲柄、滑塊和導桿組成。它將曲柄的旋轉運動轉換成為導桿的往復擺動[1]。評價其工作性能、優化設計的前提是構建數學模型,并對構件上特定點的速度和加速度進行分析,常用的方法有圖解法和解析法。解析法建立模型雖然可得到高精度的分析結果,但需經過抽象和煩瑣的數學推導和計算,容易出錯;圖解法雖簡單、直觀,但其精度不能滿足工程的要求[2]。本文結合兩者優點,采用解析法建立擺動導桿角速度、角加速度的數學模型,并借助MATLAB圖形化顯示其運動規律,對該機構使用Pro/E仿真得到同一參數的規律曲線,比較曲線的一致性,旨在驗證解析法所建模型的正確性。
1 擺動導桿機構的組成和工作原理

圖1 擺動導桿機構
圖1為擺動導桿機構簡圖,將該機構置于直角坐標系Oxy中,導桿的固定鉸鏈C點與坐標原點O重合。曲柄AB為主動件,長度為l1,導桿BC為從動件。經滑塊、曲柄的連續轉動轉變為導桿繞y軸往復擺動。假設滑塊在導桿上的位置距C點距離為l3,曲柄和導桿角位移分別為φ1、φ2。導桿擺動中心點C與曲柄旋轉中心點A間的距離為l2,且滿足 l1<l2。
2 建立系統數學模型
根據圖1,把曲柄滑塊機構看成封閉的矢量三角形,矢量方程式為:
將式(1)投影到x軸、y軸得:

由式(2)、式(3)得:tanφ2=
設曲柄勻速轉動的角速度為 ω1,即 φ1=ω1t,將式(4)對時間t求導即可得到擺動導桿的角速度表達式:

由式(4)、式(5)可得:ω2=
3MATLAB圖形仿真
MATLAB是MathWorks公司發布的主要面向科學計算、可視化以及交互式程序設計軟件,用于數值分析、矩陣計算、優化設計和仿真等諸多領域。通過MATLAB編程繪制擺動導桿的角速度、角加速度曲線,從而揭示了擺動導桿的運動規律[3]。
3.1 仿真條件初始化
圖1所示擺動導桿機構中,設定l1=500mm,l2=1000mm,曲柄勻速旋轉的角速度 ω1=40 r/min(即(4π/3)rad/s),運動周期t=1.5 s。
3.2 仿真角速度ω2,角加速度γ曲線
在命令窗口中輸入以下程序:
運行該程序可得導桿在一個周期的角速度隨時間變化的曲線,且角速度在t=0.3811 s時取最大值1.396 rad/s,如圖2所示。
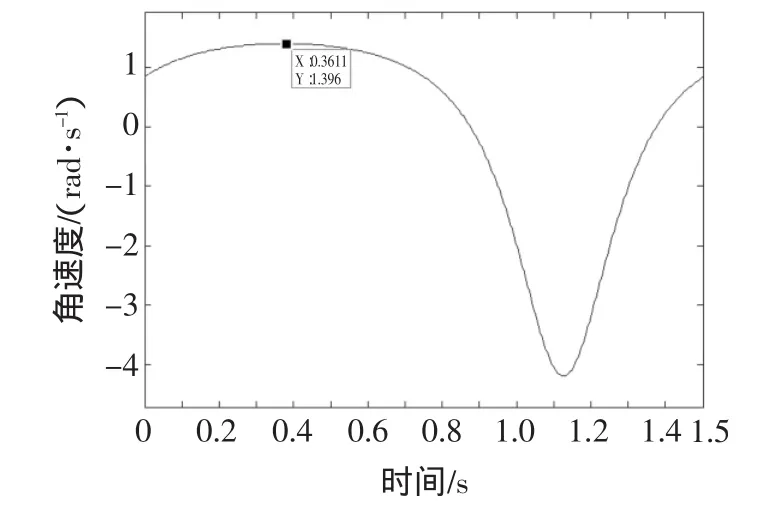
圖2 擺動導桿角速度
在命令窗口中輸入以下程序:

圖3 擺動導桿角加速度
運行該程序可得導桿在一個周期的角加速度隨時間變化的曲線,且角加速度在t=1.221 s時取最大值23.68 rad/s2,如圖3 所示。
4 Pro/E運動學仿真分析
Pro/E是一款集成了CAD/CAM/CAE于一體的工程軟件,具有極強的三維建模能力,其Mechanism模塊具有運動學仿真、分析功能[4]。建立擺動導桿機構的虛擬模型,利用Mechanism對其進行運動學仿真,得到導桿的角速度、角加速度運動曲線。
4.1 建立骨架模型
在Pro/E5.0中建立擺動導桿機構的骨架模型,l1=500 mm,l2=1000 mm,如圖4所示。

圖4 骨架模型
4.2 運動仿真分析
利用Pro/E軟件機構運動仿真模塊Pro/Mechanism觀察、分析導桿的角速度、角加速度變化走勢,得出可視化圖形。
在固定曲柄的軸上施加伺服電機,設定逆時針旋轉速度240°/s。運動分析定義的“類型”設置為“角速度”、“角加速度”,圖形顯示的開始時間為0,終止時間為1.5 s,最小時間間隔為0.02 s,執行可得機構運行情況。設置測量定義,在“測量結果”對話框中同時選中新創建的測量定義和結果集中對應的機構運動分析,單擊“繪制選定結果集所選定測量的圖形”按鈕,“圖形工具”窗口中即顯示導桿角速度和角加速度圖形,如圖5、圖6所示。

圖5 擺動導桿角速度

圖6 擺動導桿角加速度
設置插入分析特征中的相關參數,運行可得到角速度在 t=0.38 s時取最大值79.99°/s(即1.39 rad/s),角加速度在t=1.22 s時取最大值1356.79°/s2(即23.68 rad/s2)。
對比圖5與圖2、圖6與圖3可見:導桿角速度、角加速度規律曲線的變化情況完全一致,最值分別相等且達到最值的時刻相同,驗證了解析法所建模型的正確性。
5 結語
本文運用解析法建立擺動導桿機構導桿的角速度、角加速度數學模型,借助MATLAB軟件繪制其規律曲線。應用Pro/E軟件建立同一機構的骨架模型,對其進行運動學仿真、分析、測量得到運動規律曲線。結果表明,同一擺動導桿機構的導桿角速度、角加速度由MATLAB繪制解析法推導出的運動曲線和Pro/E仿真得到的運動曲線完全一致,從而驗證了解析法所建擺動導桿機構數學模型和分析運動規律所得結論的正確性。
[1] 趙勻.機構數值分析與綜合[M].北京:機械工業出版社,2005.
[2] 岳修科,黃俊杰.MATLAB在平面機構運動解析法分析中的應用[J].機械,2006,3(8):27-28,64.
[3] 陳杰平.Matlab在連桿機構仿真中的應用[J].制造業信息化,2005(11):116-117.
[4] 杜白石,劉洪萍.Pro/ENGINEER設計分析和優化機構[M].北京:電子工業出版社,2012.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
