四軸飛行器視覺導航系統設計*
2014-12-10 05:37:18樊冬雪金海林修春波
電子技術應用 2014年8期
樊冬雪,成 怡,金海林,修春波
(天津工業大學 電氣工程與自動化學院,天津 300387)
無人飛行器UAV(Unmanned Aerial Vehicle)簡稱無人機,是指利用空氣動力抵消自身重量,可以實現自主飛行而不需要操作人員的飛行器。近幾年,無人飛行器得到了迅速的發展,其使用范圍已經拓展到軍事、民用和科學研究三大領域[1]。
四軸飛行器屬于旋翼式無人飛行器的一種,具有以下幾個特點:(1)體積小、重量輕、結構對稱;(2)4個螺旋槳能產生較大的升力;(3)易于實現上下、前后、側向、水平等飛行姿態。隨著計算機技術、傳感器技術和微機電技術的發展,四軸飛行器的開發和研制取得了重大進步,成為國內外研究熱點[2]。其在環境監測、低空偵查、信號干擾等領域發揮著獨特的優勢,無論在軍事領域還是民用領域都有著廣闊的應用前景[3]。
由于四軸飛行器主要面對近地面環境,為了解決GPS在近地面環境失效的問題,本文設計了視覺導航系統來實現四軸飛行器的定位與導航。
1 視覺導航技術
計算機視覺是研究用計算機和成像設備來模擬人和生物視覺系統功能的技術學科[4],在許多人類視覺無法感知的場合(如精確定量感知、危險場景感知、不可見物體感知等),計算機視覺更顯示出它的優越性。圖像處理技術以及攝像機硬件的發展使得計算機視覺技術可以引入到無人機的導航問題中[5]。一個完整的視覺導航系統由圖像采集、圖像處理與位姿解算、導航控制三部分組成,如圖1所示。

圖1 視覺導航系統組成
目前常用的導航方式有慣性導航和GPS導航,慣性導航過程中慣性器件具有累積誤差,對初始值過于敏感;而GPS并不總是可獲取的,并且即使可以獲取,其精度上往往滿足不了無人機導航的需要[6]。視覺導航技術具有設備簡單、信息量豐富、智能化水平高、信號探測范圍廣等優點,并且依靠計算機視覺提供的實時信息可以與慣性導航和GPS信息進行融合,彌補后兩者的缺陷,提高導航精度[7],因此視覺導航被大量地采用。
2 導航系統設計方案
2.1 總體結構設計
系統利用機載攝像頭實時捕捉環境信息,通過無線收發模塊將圖像數據傳輸給上位機,采用攝像機標定方法解算四軸飛行器的位姿信息及其與著陸平臺的相對位置關系,并生成導航指令發送至主控制器,調整電機轉速,實現四軸飛行器的飛行控制。系統整體結構圖如圖2所示。
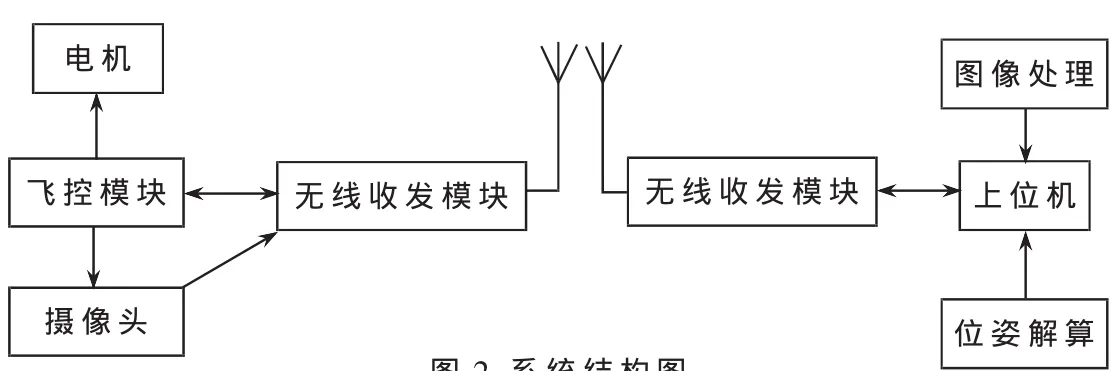
圖2 系統結構圖
2.2 飛控模塊
飛行控制模塊是整個飛行器的核心,需要執行多種復雜的任務。STM32f103系列處理器主要有以下特性:(1)32位的 ARM Cortex-M3架構;(2)支持 3.3 V低電壓供電;(3)72 MHz 運行頻率,1.25 DMIPS/MHz;(4)AD/DA、IIC、SPI、UART、USB 等多種接口功能;(5)4 個 16 位定時器和2個帶有電機控制的 PWM高級控制定時器,作為主控的核心,其在開發應用和處理器功能上有著絕對的優勢。
2.3 攝像頭
STM32開發板板載了一個攝像頭接口(P8),用來鏈接OV7670攝像頭模塊。OV7670是OV(OmniVision)公司的一顆1/6英寸的CMOS VGA圖像傳感器,其體積小,工作電壓低,有效像素為 640×480,提供單片VGA攝像頭和影像處理器的所有功能。
2.4 無線收發模塊
nRF24L01是一款工作在2.4~2.5 GHz世界通用ISM頻段的單片無線收發器芯片,具有125個可選工作頻道,數據傳輸率為1或2 Mb/s,SPI接口數據速率為0~8 Mb/s,工作電壓為 1.9~3.6 V,擁有自動應答及自動重發功能。
3 圖像處理與位姿解算
圖像處理與位姿解算是視覺導航系統的核心與關鍵,是四軸飛行器能否實現定點降落的前提。當系統獲得一幅圖像時,需要對圖像數據進行處理、分析、理解,并從中提取出對飛行器著陸有用的信息,解算出飛行器實時的位置和姿態信息。導航系統提供實時的位姿參數作為自主飛行控制算法的主要輸入參數,以達到飛行器自主飛行控制的目的[8]。圖像處理與位姿解算的流程如圖3所示。
3.1 圖像預處理
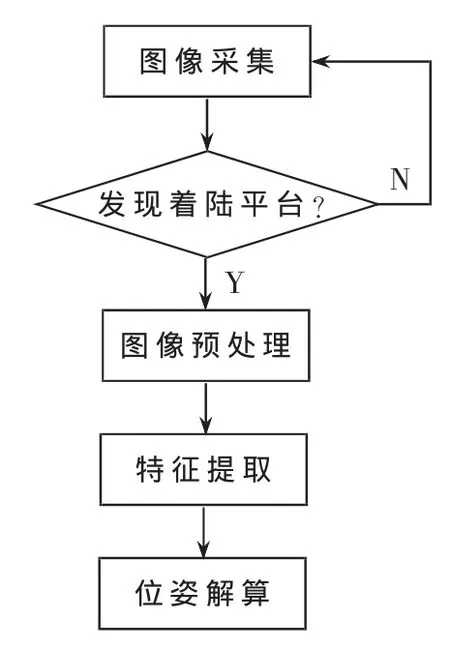
圖3 圖像處理與位姿解算流程
在圖像生成、傳輸和記錄過程中,成像系統、傳輸介質、工作環境和記錄設備的不完善均會引入噪聲而使圖像質量下降。圖像預處理的目的是采用一系列技術降低噪聲的影響和圖像的失真程度[9],包括圖像的去噪、灰度化、二值化等。
3.2 特征提取
角點是圖像很重要的特征,對圖像圖形的理解和分析有很重要的作用[10]。角點提取是一種典型的幾何特征提取方法。Harris算法是基于亮度變化的角點檢測算法,不依賴于目標的其他局部特征,利用角點本身的特點直接提取角點,計算簡單,具有較高的穩定性和魯棒性,能夠在圖像旋轉、灰度變化以及噪聲干擾等情況下準確地檢測特征點,具有較高的點重復度和較低的誤檢率。Harris算法提取棋盤格角點如圖4所示,棋盤格旋轉后提取的角點如圖5所示。
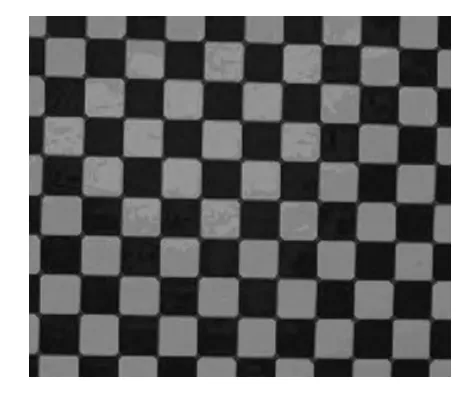
圖4 Harris算法提取棋盤格角點
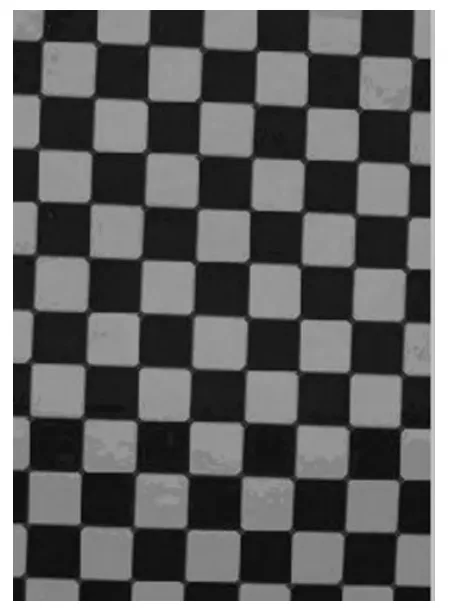
圖5 棋盤格旋轉后提取的角點
3.3 位姿解算
由于攝像頭是安裝在四軸飛行器上的,其與飛行器的相對位置關系已確定,因此可由攝像頭的位姿信息來推算四軸飛行器的實時位姿信息。常用的位姿測量方法其實質是攝像機外部參數標定的過程。攝像機標定是確定攝像機內外參數的一個過程,其中內部參數的標定是指確定攝像機固有的、與位置參數無關的內部幾何與光學參數;而外部參數的標定是指確定攝像機坐標系相對于世界坐標系的三維位置和方向關系,可用3×3的旋轉矩陣R和一個平移向量t來表示。從攝像機采集到的圖像中提取并區分各個特征點之后,得到了一系列特征點的物理世界坐標系和圖像像素坐標系坐標對。對于像素坐標,利用攝像機標定過程測得攝像機內部參數,在得到內部參數之后,就可以進一步確定相對于每一副圖像的旋轉矩陣R和平移向量t。
(1)位置解算
攝像機坐標系與世界坐標系的轉換關系可表示為:
平移向量t是世界坐標系原點在攝像機坐標系下的坐標,而所需求解的攝像機位置參數T是指攝像機坐標系原點在世界坐標系下的坐標,因此需要對式(1)進行修改。將攝像機坐標系與世界坐標系的轉換過程描述為先進行平移,然后進行旋轉,則其關系可表示為:

結合式(1)、式(2)可得攝像機的位置參數:

(2)姿態角計算
姿態角(翻滾角 α、俯仰角 β和航向角 γ)參數則需要根據旋轉矩陣R并結合坐標系旋轉幾何關系來進行求解。

其中:
由此可得姿態角的計算公式為:

4 實驗結果
用VC++設計上位機界面,實現實時監控。攝像機標定是在飛行器飛行前進行的,因此該過程不會占用飛行時圖像處理時間,只需將得到的內部參數值記錄到飛行器控制系統中,方便求解位姿狀態。實驗過程在室內進行,四軸飛行器從世界坐標系原點(0,0,0)(單位:cm)起飛,著陸平臺鋪設在地面上,中心位于世界坐標系(450,450,0)(單位:cm)。當著陸平臺不在視野范圍內時(如圖6所示),則發送導航指令控制飛行器繼續搜尋。一旦出現著陸平臺(如圖7所示),就引導飛行器飛行至著陸平臺正上方(如圖8所示),最后垂直降落到著陸平臺上,運行軌跡如圖9所示。
在相同條件下,分別進行10次試驗,四軸飛行器著陸地點坐標如表1所示。
實驗結果表明,基于著陸平臺的四軸飛行器視覺導航系統在室內具有一定的導航精度,能夠實現四軸飛行器的起飛、懸停、定點降落這一系列過程。但是由于需要進行大量的圖像處理,耗時較多,還很難滿足高實時性的要求。室內環境相對簡單,不受天氣等的影響,系統的抗干擾能力還有待提高。單一的視覺導航方式在精度、穩定性、實時性等方面還有待提高和發展。因此融合其他導航方式的組合導航將成為接下來的研究重點。
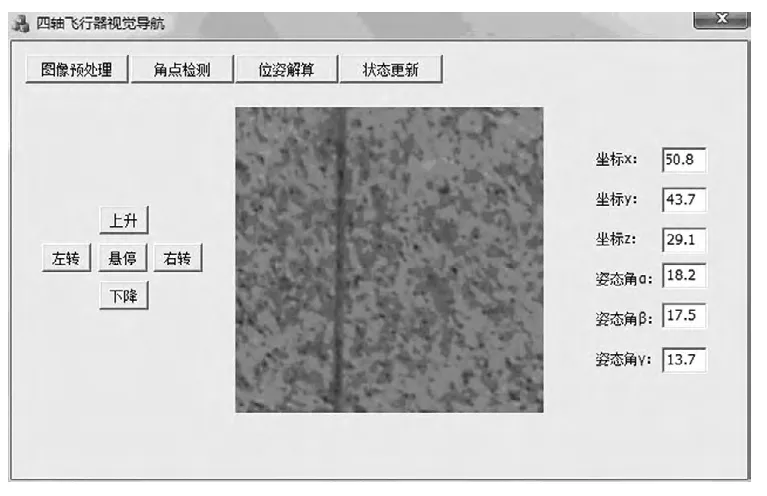
圖6 著陸平臺不在視野范圍內
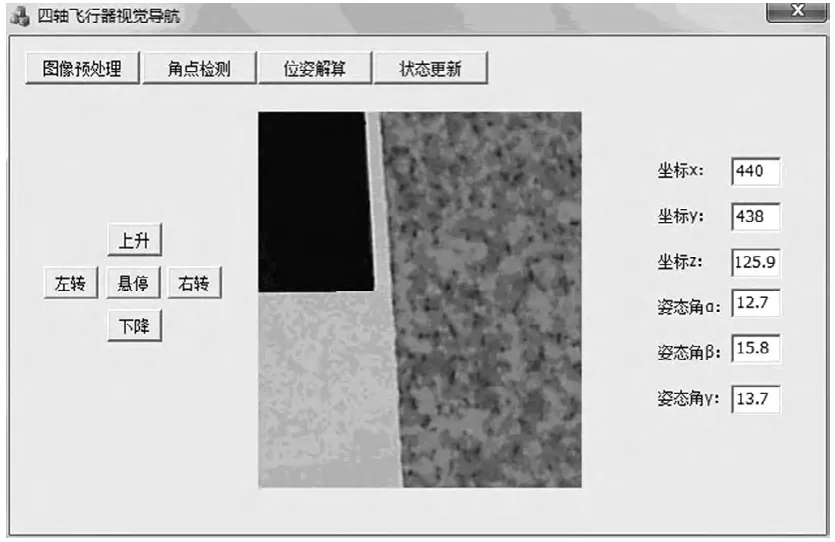
圖7 著陸平臺出現在視野范圍內
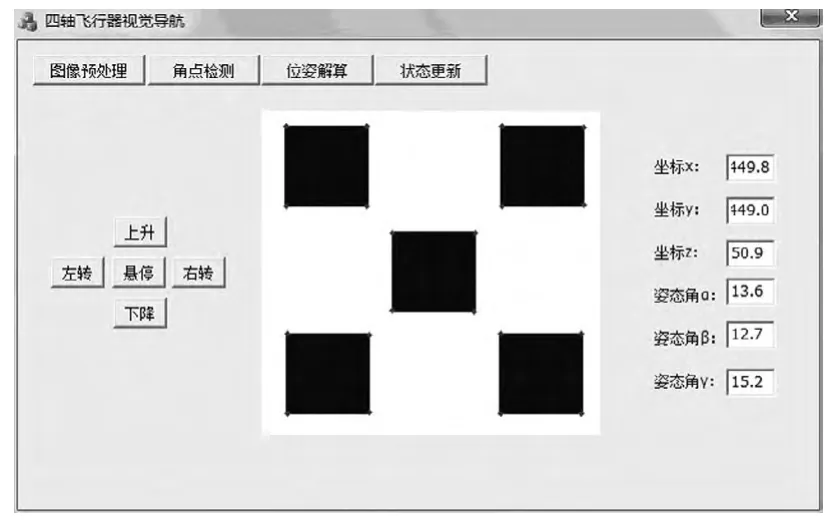
圖8 飛行器懸停于著陸平臺正上方
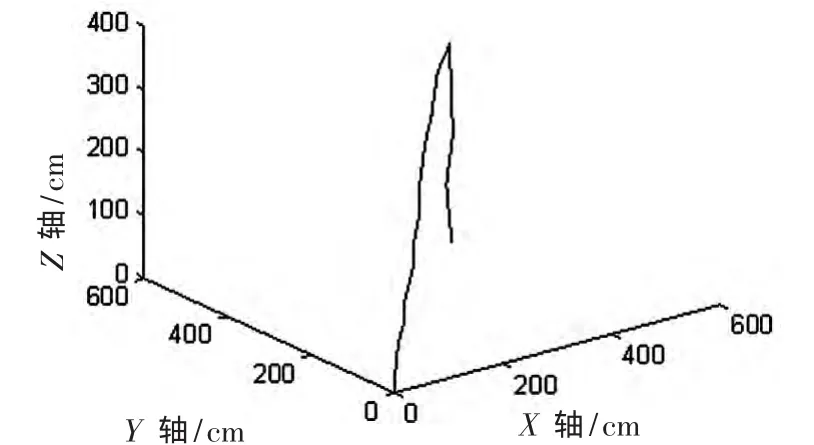
圖9 飛行器運動軌跡

表1 10次試驗結果(cm)
[1]袁安富,徐金琦,王偉,等.基于雙STM32多旋翼無人機控制系統設計[J].電子技術應用,2013,39(11):136-138.
[2]BETHKE B.Persistent vision-based search and track using multiple UAVs[D].USA:Department of Aeronautics and Astronautics,Massachusetts Institute ofTechnology,2005.
[3]岳基隆,張慶杰,朱華勇.微小型四旋翼無人機研究進展及關鍵技術淺析[J].電光與控制,2010,17(10):46-52.
[4]段峰,王耀南,雷曉峰,等.機器視覺技術及應用綜述[J].自動化博覽,2002,18(3):59-62.
[5]吳顯亮,石宗英,鐘宜生.無人機視覺導航綜述[J].系統仿真學報,2010,22(1):62-65.
[6]徐貴力,倪立學,程月華.基于合作目標和視覺的無人飛行器全天候自動著陸導引關鍵技術[J].航空學報,2008,29(2):437-442.
[7]WU A D,JOHNSON E N,PROCTOR A.Vision-aided inertial navigation for flight control[C].AIAA Guidance,Navigation and Control Conference,San Francisco,CA,August 2005:348-360.
[8]阮利峰.小型無人直升機自主著陸視覺導航系統設計及仿真[D].上海:上海交通大學,2009.
[9]殷婕,龔曉峰,武瑞娟,等.基于圖像處理的調頻信號參數估計[J].電子技術應用,2013,39(1):83-89.
[10]趙文彬,張艷寧.角點檢測技術綜述[J].計算機應用研究,2006,10(1):17-20.
