基于下視序列圖像的無人機測速方法*
2014-12-10 06:40:40黃志仁李歲勞
彈箭與制導學報 2014年2期
黃志仁,陳 楸,何 穎,李歲勞
(西北工業大學自動化學院,西安 710129)
0 引言
近年來,攝影測量和計算機視覺[1]應用于無人機導航[2]的研究越來越多,特別是與慣性導航構成組合導航系統。文獻[3]利用無人機上的慣性導航系統、激光測距儀或雷達高度表和攝像機采集的序列圖像得到無人機的飛行速度。文獻[4]使用KLT(Kanade-Lucas-Tomasi)算法[5],實現了序列圖像中相鄰兩幀圖像間的特征點匹配跟蹤。
文中著重研究慣性穩定輔助特征點匹配算法,用于估計無人機的地速,在短時失去GPS信號時,可通過航程推算保持可用的定位精度,以利于后續的基于可視地標的精確定位。
1 慣性穩定輔助特征點匹配算法
文中先利用SURF(speeded up robust features)算子[6]提取特征點,再利用速率陀螺提供的航向和姿態角增量確定特征點在下一幀圖像的搜索區域,從而加快特征點匹配速度并減少誤匹配。
對于相鄰兩幀圖像k-1和k,空間一點在攝像機坐標系下的關系為:

采用“前-右-下”坐標系,旋轉變換R可由速率陀螺測量的偏航角增量δψ、俯仰角增量δθ和滾轉角增量δφ估計:

平飛時,載機前向位移δx和側向位移δy是待估計量,由此可確定平移變換:

已知焦距f時,攝像機坐標系中的點可以變換到圖像坐標系:

平飛時,可得空間同一點的圖像坐標受載機運動的影響:

其中,載機航向和姿態變化產生的影響:

載機平移產生的影響:

由式(5)估計第k-1幀特征點在第k幀中的中心位置(^uk,^vk),根據傳感器的誤差特性和載機的相對高度及速度范圍估計候選匹配區域的寬度εu和高度 εv,下文仿真實驗時取 εu=16 pixel,εv=12 pixel,如圖 2(b)所示。
2 仿真實驗
本實驗采用的序列圖像是在基于LabWindows CVI2010和OpenGL開發的虛擬視景仿真平臺上模擬拍照獲得的。無人機飛行虛擬視景仿真平臺的主界面如圖1所示。

圖1 無人機飛行視景仿真
無人機平均相對高度H=1 057 m,地形起伏約±5 m,飛行速度大小V=29.6 m/s。35 mm相機等效焦距f=70 mm,圖像分辨率為640×480時,地面對應拍攝范圍為528.5 m×396.4 m。每隔 δt=480 ms拍攝一次,每拍攝一幀圖像,無人機飛經14.2 m,則連續兩幀圖像的重疊率約96%。姿態角誤差采用一階馬爾科夫隨機過程模擬,時間常數取為3 min。
在Intel core2 E7300 2.66 GHz的CPU和2 G內存的PC機環境下,編程實現文中提出的慣性穩定輔助特征點匹配算法,算法總耗時186 ms,匹配效果如圖2所示。匹配特征點用黑色“o”表示,并用數字標號。從圖2(a)可以看出完成7對匹配點,無誤匹配點。圖2(b)是局部放大圖,顯示第3號特征點在第30幀的匹配結果,其中黑色“+”表示預估特征點(^uk,^vk),黑色“o”表示得到的匹配特征點,黑色線框表示該特征點的候選匹配區域。圖2(c)是SURF算法匹配效果,完成54對匹配點中有9對誤匹配點,總耗時為1 732 ms。兩種算法比較結果見表1。

圖2 匹配結果

表1 匹配算法比較
圖3是連續40幀測速結果,速度平均值為30.45 m/s,均方值誤差為 1.32 m/s。從仿真實驗結果可以看出,僅利用某一幀圖像信息測量的瞬時速度絕對誤差約2.28 m/s。失去 GPS信號3 min航位推算的北向位置誤差約 132.5 m,東向位置誤差約76.5 m。
3 誤差分析
3.1 載機航向和姿態誤差影響

圖3 速度檢測結果
偏航角誤差eψ直接影響測量速度的方向。俯仰角誤差eθ直接影響前向位移,滾轉角誤差 eφ直接影響側向位移,故兩者都影響測量速度的大小。
陀螺漂移可以用加速度計測量的垂線來抑制,可以保持在 3° 以內,故可以設 eθ=eφ=3° ,由 eθ和 eφ帶來的速度誤差都很小,約0.001 4 m/s。
3.2 速率陀螺測量誤差的影響
速率陀螺測量的姿態角增量誤差對速度測量誤差影響較大,在此只分析俯仰角增量誤差eδθ帶來的影響,如圖4所示。
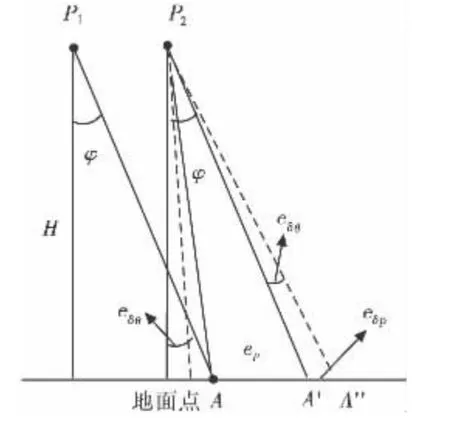
圖4 俯仰角增量誤差的影響
攝像機光心在兩個時刻的位置為P1和P2,對地面點A的投影線與垂線的夾角為φ,由于速率陀螺測量俯仰角增量不準而導致垂線偏離的角度為eδθ。實際位移,由eδθ帶來的位移誤差為:

所以速度誤差為:

若eδθ=0.05°,按上文的仿真條件計算得到該速度誤差為1.92 m/s。由速率陀螺和加速度計構成垂直陀螺,姿態誤差可以限定在3°以內,由此可以抑制陀螺漂移對定位誤差的影響。
3.3 相對高度測量誤差和地面起伏的影響
圖像匹配得到的像差轉換到實際相對地面的偏移量時,需要根據飛行高度來確定對地面的成像分辨率,參考式(7)。如圖5所示,根據相似三角形原理,由高度測量誤差eδH帶來的速度誤差:


圖5 高度測量誤差的影響
實際飛行中的高度信息由雷達高度計或激光測距儀等提供,其誤差包括隨機誤差和系統誤差。對于隨機誤差可通過數據平滑進行消除和抑制;但系統誤差將直接影響測量精度。若高度存在1%的相對誤差,則測速結果也存在1%的相對誤差。
4 總結
文中在無人機平飛序列成像的狀態下,結合陀螺儀和高度計提供的信息,研究了實時、較高精度測量無人機地速的方法,并進行了仿真實驗。利用低成本的MEMS陀螺儀,采用文中提出的方法,就可以得到較高精度的無人機地速,同時可以實現短時間內的較高精度的航位推算和軌跡跟蹤。
[1]Kendoul F. Survey of advances in guidance,navigation,and control of unmanned rotorcraft systems[J]. Journal of Field Robotics,2012,29(2):315 -378.
[2]吳顯亮,石宗英,鐘宜生.無人機視覺導航研究綜述[J].系統仿真學報,2010,22(1):62-65.
[3]Wang J L,Garratt M,Lambert A,et al.Integration of GPS/INS/Vision sensors to navigate unmanned aerial vehicle[C]//International Archives of Photogrammetric,Remote Sensing and Spatial Information Sciences,2008:963-969.
[4]Conte G,Doherty P. An integrated UAV navigation system based on aerial image matching[C]//Proceeding of the IEEE Aerospace Conference,2008:1-10.
[5]Shi J,Tomasi C. Good features to track[C]//Computer Vision and Pattern Recognition,IEEE Computer Society Conference on Proceedings CVPR’94,1994:593-600.
[6]Bay H,Tuytelaars T,Van Gool L.Surf:Speeded up robust features[M].Computer Vision-ECCV 2006. Springer Berlin Heidelberg,2006:404 -417.
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國塑料(2016年3期)2016-06-15 20:30:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
