懸浮子彈降落與懸浮過程彈道特性動力學分析*
2014-09-20 09:27:32錢建平季溢棟居仙春
彈箭與制導學報 2014年2期
雷 偉,錢建平,季溢棟,居仙春
(南京理工大學機械工程學院,南京 210094)
0 引言
懸浮彈系統是一種新型的“被動式”防御武器,它是一種屏障式武器,可以構筑有效的防御系統。我國對懸浮裝置的結構、氣囊空中充氣技術以及懸浮彈空中姿態有相關研究[1-2]。文獻[3]提出了一種驅動旋翼的方法使懸浮彈達到懸浮。
文中采用旋翼結構,通過對懸浮子彈的工作過程研究,包括母彈開艙拋撒、無翼慣性下降、旋翼張開無動力驅動慣性下降、有動力驅動旋翼減速至穩定懸浮等階段,并結合算例進行數值分析得到最佳的驅動方式和驅動力矩。
1 概述
1.1 彈道特性
根據懸浮子彈的工作過程將懸浮子彈的彈道分為4個階段,如圖1所示。懸浮子彈經母彈開艙自由下落段(Ⅰ),減速減旋段(Ⅱ)可分為兩種方式:開翼立即驅動至穩定懸浮(Ⅱ-a);先開翼無動力驅動慣性下降(Ⅱ-b1)再有動力驅動至穩定(Ⅱ-b2),穩定懸浮段(Ⅲ),有翼慣性下降無動力驅動段(Ⅳ)。并將開始有動力驅使至穩定懸浮的時間稱為過渡時間,即Ⅱ-a和Ⅱ-b2段所用時間。懸浮子彈經過渡段到達穩定懸浮(Ⅲ)構筑防御屏障,這也正是其與普通子母彈的最大區別。

圖1 彈道特性示意圖
1.2 結構特性
懸浮子彈由旋翼、驅動裝置和彈體三部分組成,如圖2所示。旋翼與驅動裝置之間以及驅動裝置與彈體之間的連接分別稱作軸承1和軸承2。為了使彈體更好的減旋,下文中會在某一彈道階段采取旋翼與驅動裝置、驅動裝置與彈體固結在一起的形式(即不產生相對轉動),分別稱作軸承1、2固聯,不固結在一起稱作軸承自由(不固聯)。由于驅動裝置與彈體之間的轉速不同,將驅動裝置與彈體分別看作剛體1和剛體2采用兩剛體建模能夠更好的模擬真實情況。

圖2 懸浮彈結構及坐標示意圖
2 旋翼下降過程動力學模型
2.1 旋翼展開后無動力驅動時力學模型
由于懸浮子彈從母彈拋出后有很高的迎面速度,產生相對翼片自下而上的相對氣流,其速度大于旋翼的誘導速度。相對氣流U自下而上斜向指向槳葉,葉素來流角為負值。因葉素所產生的升力Y與相對氣流合速度U垂直,所以葉素的升力Y向前傾斜,在旋轉面上的分力Qy指向前方,起拉著旋翼繼續旋轉的動力作用;而空氣阻力X形成的旋轉阻力Qx起阻止旋翼旋轉的作用。當旋翼各片槳葉的Qy和Qx取得平衡時,旋翼就能在自下而上的相對氣流作用下保持穩定自轉,如圖3所示。
葉素上的相對氣流速度U可表示為:


圖3 葉素在下降狀態下的受力分析
式中:UT、UP分別為槳葉剖面的切向速度和軸向速度;Ω、r為槳葉旋轉速度和槳葉剖面徑向位置;Vc、vi分別為旋翼漿盤迎流速度和與之對應的誘導速度,此時在高下降率的情況下,經典的動量理論不再成立[4]。
這樣,葉素上的升力Y和阻力X有:

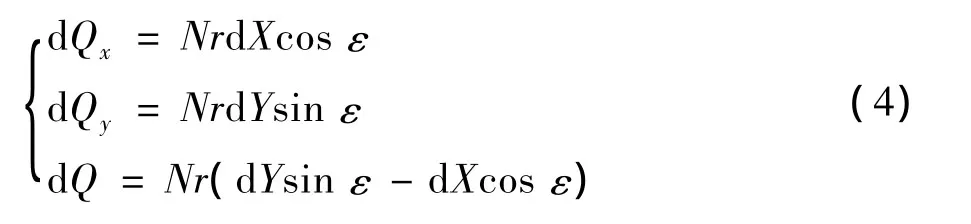
式中:Cl、Cd為升力系數與阻力系數[5]。來流角ε和攻角α可分別表示為(向上為正),α=θ-ε,θ為葉片安裝角,c為槳葉當地弦長。則微元為拉力:

微元阻力矩:
因此,得出了懸浮子彈從母彈拋撒出后無動力驅動時展開旋翼,旋翼轉速的變化規律:

式中:J為旋翼的轉動慣量;Mk為旋翼對驅動裝置的反作用力矩。直至Qy和Qx相等時,旋翼穩定自轉。將式(4)代入式(1)~式(3)便能得到無動力驅動時的升力T(t)。
2.2 旋翼有動力驅動時力學模型
旋翼開始有動力驅動時,輸入轉矩會給定一扭矩M。接下來分兩種情況:
1)Vc>vi時,Qy和Qx的方向仍然相反,輸入力矩為了使旋翼加速,此時與Qy方向一致。旋翼的轉速隨時間變化:

隨著轉速與提升力的增加,懸浮子彈下降速度勢必會逐漸減小,直至出現Vc≤vi時,ε由負值變為正值,力矩方向隨之發生變化。
2)Vc≤vi時,Qy和Qx的方向相同,有:

至此,已經得到了完整的旋翼下降過程力學模型,接下來建立懸浮子彈剛體彈道模型。
3 懸浮子彈兩剛體外彈道模型
3.1 坐標系的建立與變換
首先建立地面慣性坐標系O-X0Y0Z0,原點O為懸浮彈子彈拋撒點的地面投影點,OX0軸水平沿射向,OZ0軸鉛直向上,OY0軸由右手法則確定;驅動裝置固連坐標系O1-X1Y1Z1,原點O1為驅動裝置質心,O1Z1在鉛直面內指向彈頂,O1Y1在鉛直面內垂直于O1Z1軸,O1X1由右手法則確定;彈體固連坐標系O2-X2Y2Z2,原點O2為彈體質心,各軸與O1-X1Y1Z1系平行;彈體基準坐標系O2-X0Y0Z0,原點O2為彈體質心,各軸與O-X0Y0Z0系平行。各坐標系如圖2所示。
坐標變換只需考慮兩組變換即可。O2-X0Y0Z0與O2-X2Y2Z2之間可由3個歐拉角:進動角ψ2,自轉角φ2,章動角θ2轉換而來,轉換矩陣用[ ]A 表示如下。O2-X2Y2Z2與 O1-X1Y1Z1之間只是坐標原點移動O2O1,故轉換矩陣同樣可用[]A 表示。另外有:[]A-1=[ ]AT。

3.2 運動方程的建立
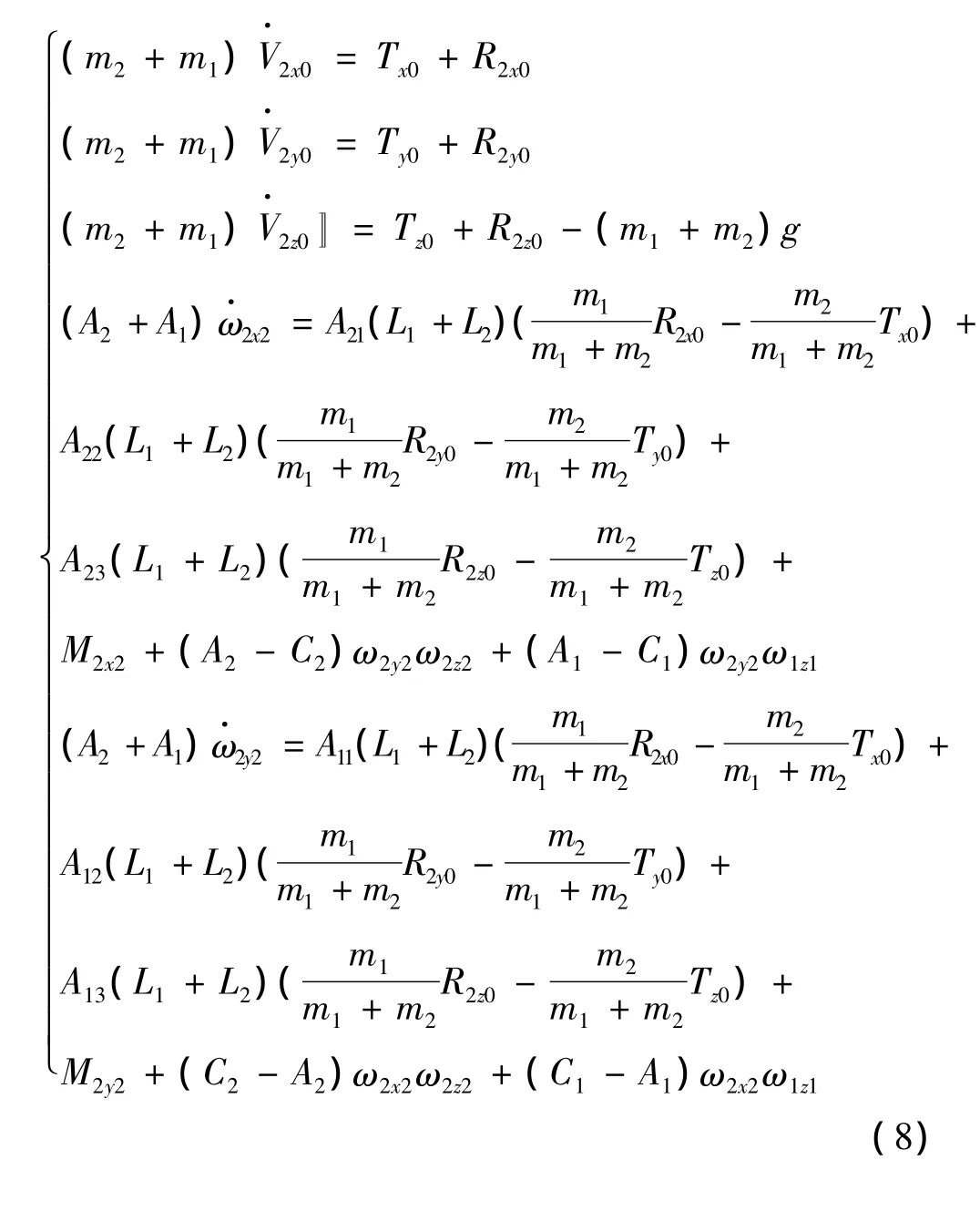
通過對各剛體所受力、力矩的分析,將所有的力投影到 O-X0Y0Z0坐標系上,所有的力矩投影到O2-X2Y2Z2坐標系上得:
軸承1、2之間的關系得到方程:
式(8)、式(9)中:下標帶有 xi、yi、zi表示通過坐標變換投影到O-XiYiZi(i=0,1,2)坐標系中;m1和m2、A1和A2、C1和C2分別為驅動裝置剛體與彈體剛體的質量、赤道轉動慣量、極轉動慣量;L1和L2分別為O1D和O2D的距離;T為旋翼的拉力;R2為彈體所受的空氣動力,包括阻力Rx2、升力Ry2和馬格努斯力;M2為彈體所受的空氣動力矩,包括彈體的極阻尼力矩Mxz2,靜力矩Mz2,赤道阻尼力矩Mzz2
[6];Mf1和Mf2分別為軸承 1、2的摩擦力矩,有:Mf=f0(vn)2/3d3m,dm為軸承平均直徑,f0為考慮軸承結構和潤滑方法的系數,n為軸承連接體之間相對轉速,v為潤滑劑的運動粘度;Mk為旋翼的反扭矩,由旋翼的力學模型中可得到。
3.3 四元數法替代歐拉角
歐拉角之間的關系:

由于歐拉角的表示方法在計算中容易出現奇點而停止運算,文中采用四元數法替代歐拉角[7]:
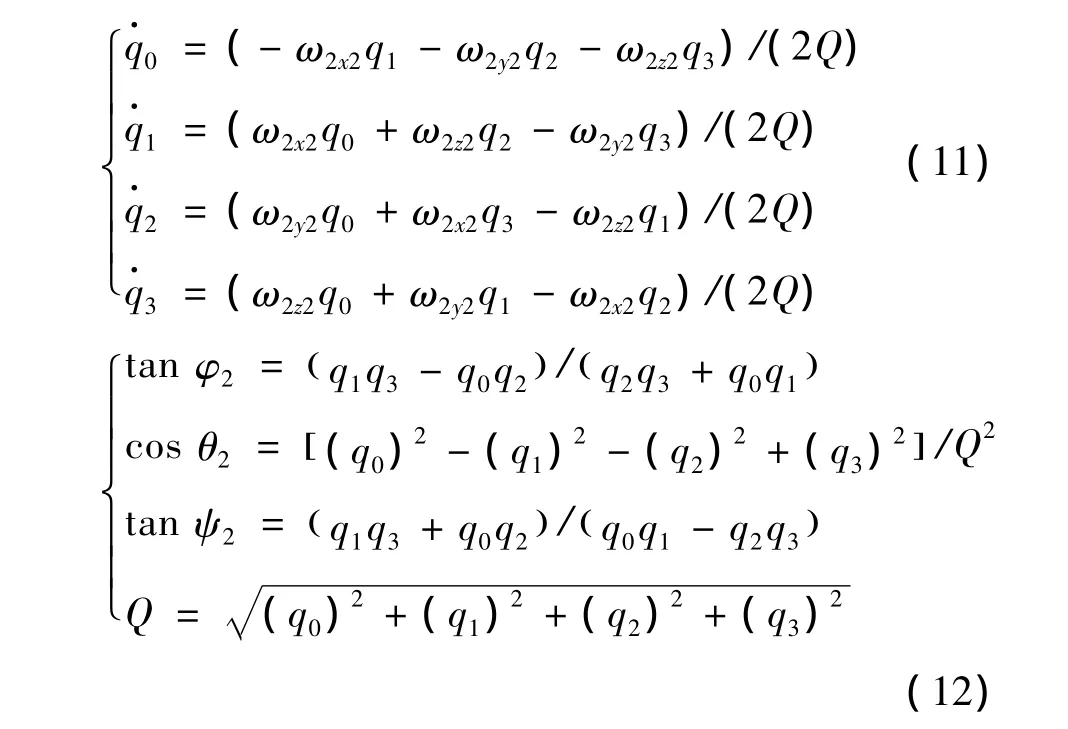
至此,已經得到了完整的旋翼下降過程力學模型和懸浮子彈剛體彈道模型,將旋翼力學模型中的T(t)、Mk代入彈道模型中便能得到懸浮彈的彈道軌跡。
4 初始參數
子彈出艙參數:母彈存速300 m/s,拋撒速度40 m/s,彈道傾角60°,子彈出艙轉速10 000 r/min,開艙高度1 000 m。
空氣密度 ρ=ρon(1 -2.19 ×10-5h)4.4016,其中 ρon=1.293 kg/m3為地面空氣密度,h為高度的變化。其他參數如表1所示。

表1 彈型與翼型相關參數
采用VB編寫仿真程序,以時間為自變量利用四階龍哥庫塔法對Ⅰ、Ⅱ、Ⅲ段彈道方程進行數值計算分析。
5 只開翼,不驅動分析
在給定的初值條件下,子彈從母彈拋出后,讓其自由下落,7.6 s便已落地,落地時的z方向速度(下稱落速)仍然有94.5 m/s,彈體轉速仍然有84.5 r/s。
圖4、圖5是3種固聯方式下高度和彈體轉速隨時間變化曲線。可以看出,固聯方式的不同對彈體減速效果以及落地時間差別并不大,但對彈體減旋的效果影響卻很大。

圖4 時間-高度 圖5 時間-彈體轉速
考慮到彈體一直處于高速旋轉狀態對結構的要求會更高,三種固聯方式對減速效果幾乎相同的情況下(落地時間分別為 19.03 s、19.66 s、19.76 s)采用軸承1、2都固聯相對于其他兩種方式在彈體減旋上效果更好。因此,綜合考慮此階段采用軸承1、2都固聯的方式是最佳的。
6 驅動旋翼分析
6.1 確定最佳驅動方式
由于此時旋翼已經驅動,軸承1必須自由。假定懸浮子彈在150 m必須進入穩定懸浮階段(落速小于10 m/s)。按照驅動方式的不同將其分為直接驅動(Ⅱ-a)和先開翼減速減旋一段時間再驅動(Ⅱ-b1+Ⅱ-b2)兩種方式。首先給定正好能夠克服懸浮子彈自身重力的驅動力矩,取M=0.056 N·m。
圖6是在軸承2不固聯情況下兩種驅動方式高度隨時間變化的對比。可以看出,Ⅱ-b的曲線全部在Ⅱ-a曲線之上,這說明先開翼后驅動的方式能夠滯空的時間更長一些;圖7是彈體轉速隨時間的變化曲線,顯然先開翼后驅動的方式對彈體的減旋效果比較好,而且對比2軸承的固聯方式可以看出,2不固聯的方式能夠在驅動旋翼以后彈體仍然保持減旋狀態,當2固聯時由于驅動旋翼以后旋翼的轉速大于彈體的轉速,致使它們之間的摩擦力矩仍會給彈體一個加速旋轉的作用。

圖6 時間-高度 圖7 時間-彈體轉速
綜合以上對比,采用先開翼減速減旋一段時間,此時1、2都固聯,然后再使1、2都不固聯驅動旋翼是最佳的驅動方式。此方式能夠更快的減速,彈體能夠更好的減旋,而且有更長的滯空時間。但是無論哪種驅動方式過渡時間都很長。因此,需要通過增大驅動力矩的方法來減少過渡時間。
6.2 確定最佳驅動力矩
由于需要懸浮子彈在一定的驅動能量下,更長時間的處于懸浮段才能更有效的構筑防御屏障。因此,通過增加驅動力矩的方法減小過渡時間是必要的。采取上述確定的最佳驅動方式,對比1.2M、1.4M、1.6M、1.8M、2.0M、2.2M(M 是克服自身重力所需要的驅動力矩,M=0.056 N·m)時的彈道模型。
表2是800 m開翼高度不同驅動力矩(M的倍數)下所用過渡時間表,圖8是過渡時間隨驅動力矩增大的變化曲線。

表2 800 m開翼不同驅動力矩下過渡時間(s)

圖8 驅動力矩倍數-過渡時間
可以看出,雖然隨著驅動力矩的增加過渡時間在減小,但屬于一個慢慢進入平緩的過程,在1.8倍之后基本進入水平階段。然而在一定能量的情況下,驅動力矩越大能夠驅動的時間也就越短。另外,懸浮彈在以大于M的驅動力矩減速到達懸浮段后必須有一個減小驅動力矩至M的過程,否則懸浮子彈會繼續上升。越大的驅動力矩減小至M對結構的要求也會越困難。綜合考慮過渡時間、一定能量下能夠產生的驅動時間以及對結構的要求,選取1.4~1.8M之間驅動減速是最合適的。
7 結論
1)懸浮子彈在展開旋翼未驅動的情況下比自由下落子彈能夠延長11.5 s左右落地,此時的最佳開翼方式是軸承1、2都固聯的方式。
2)給出了懸浮子彈的最佳驅動方式是:先軸承1、2都固聯減速一段時間再軸承1、2都不固聯驅動旋翼。此驅動方式能夠更快的減速,彈體能夠更好的減旋而且有更長的滯空時間。
3)給出最佳的驅動力矩是剛好能夠克服自身重力所需力矩的1.4~1.8倍之間,此時的過渡時間在4.5 ~6.5 s之間。
[1]閆紅紅,胡勇,張亞.空中懸浮裝置的結構設計[J].機械工程與自動化,2009(3):155-156.
[2]錢立志,陶聲祥,劉玉文.利用彈道方程計算懸浮彈射擊諸元[J].火力與指揮控制,2008,33(7):19-21.
[3]胡西博,錢建平,季溢棟,等.渦輪驅動懸浮裝置動力特性分析和試驗[J].四川兵工學報,2013,34(3):21 -25.
[4]曹棟,曹義華.垂直下降狀態下的旋翼三維流場數值模擬[J].北京航空航天大學學報,2012,38(5):641-647.
[5]李振波,陳佳品,張琛.低雷諾數四旋翼飛行器升力分析與計算方法研究[J].中國機械工程,2005,16(7):249-251.
[6]袁子懷,錢信芳.有控飛行力學與計算機仿真[M].北京:國防工業出版社,2001.
[7]楊啟仁.子母彈飛行動力學[M].北京:國防工業出版社,1999.
