基于支持向量回歸機的導彈平臺調平過程模型辨識*
2014-09-20 09:27:32盧文忠劉丙杰冀海燕
彈箭與制導學報 2014年2期
關鍵詞:模型
盧文忠,劉丙杰,冀海燕
(海軍潛艇學院,山東青島 266042)
0 引言
平臺調平是某導彈測試、發射過程中的重要程序,主要完成對平臺框架坐標系的OPXP軸與OPZP軸進行調平,從而使框架坐標系XPOPZP平面與當地的水平面平行。平臺調平回路有X、Z兩條,均由石英撓性擺式加速度計、調平放大器(含校正網絡、功率放大器)及平臺穩定回路組成。
由于平臺調平裝備結構、調平過程涉及因素眾多,難以建立精確的平臺調平解析模型,從而影響了仿真的逼真度以及訓練的真實性。
支持向量回歸機作為一種性能良好的模型辨識方法,在眾多領域得到了廣泛應用[1-3]。本系統根據歷史調平數據,利用支持向量回歸機對平臺調平回路進行模型辨識,從而產生逼真的調平數據,為某導彈的全過程訓練提供數據支持。
1 支持向量回歸機原理
支持向量回歸機是從數據分類問題的研究中發展而來的,將估計指示函數(對模式識別問題)中得到的結論推廣到估計實函數(回歸)中,且引入一種新的損失函數——ε不敏感損失函數,這樣就可以得到基于支持向量機的回歸估計方法。
給定訓練樣本(xi,yi),i=1,2,…,l,若是在線性情況下,定義如下線性函數集合:

可以從上式估計函數,損失函數一般情況下定義為ε不敏感損失函數[3]:

ε不敏感損失函數的優點是可以使估計具有魯棒性,而且得到的解是稀疏的,而這一點對在高維空間用大量數據估計依賴性關系來說是非常重要的。在這里采用線性ε不敏感損失函數:
基于結構風險最小化原理,可以將問題轉化為:
由 ω、b 與 αi、α*i的關系,可以得到最優估計函數:由上式可知,ω的最優估計值僅與αi≠α*i,i=1,2,…,l所對應的樣本向量xi有關,這樣的樣本向量xi就稱為支持向量,支持向量只占總樣本的一小部分,所以利用支持向量可以使訓練過程大大簡化,而且使得到的估計函數具有很好的推廣能力。
2 平臺調平過程時間序列模型辨識
從某導彈平臺調平過程可以看出,調平的主要目的是對7個參數進行調整,包括俯仰角θ1、偏航角θ2、滾動角 θ3、加速度計當量 wx、wy、wz、調平輸出當量 Ct等[5]。所以,要建立平臺調平過程模型,就是對上述7個參數進行辨識。文中對上述各參數各建立一個支持向量回歸機模型組成平臺調平過程時間序列模型,原理如圖1所示。
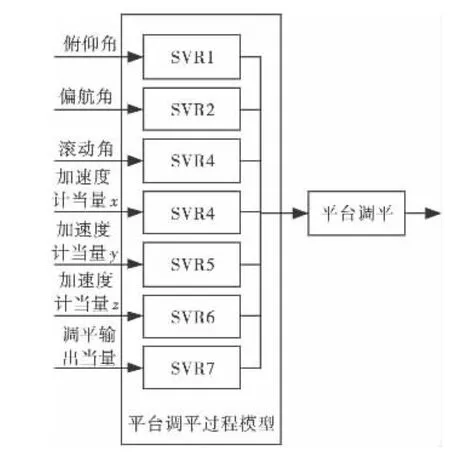
圖1 平臺調平模型辨識原理
假設參數X的時間序列樣本為:

支持向量回歸機的輸入、輸出樣本分別為:
則支持向量回歸機模型為:
3 仿真實例
某導彈平臺調平參數部分樣本值如表1所示。
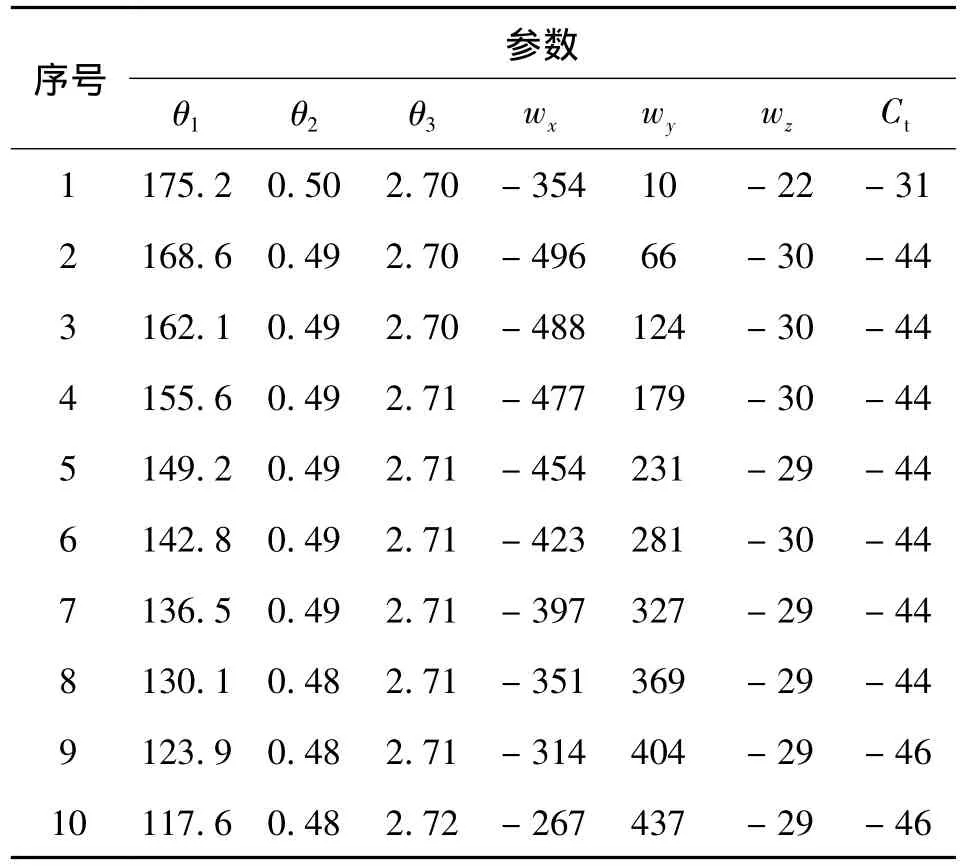
表1 某導彈平臺臨射調平數據
本系統利用上述數據,采用支持向量回歸機建立某導彈的平臺調平過程模型。支持向量機參數C=10 000,σ2=0.01,核函數選擇 RBF 核函數,仿真平臺為Matlab 6.5,平均預測誤差:2.56%,計算結果見表2。
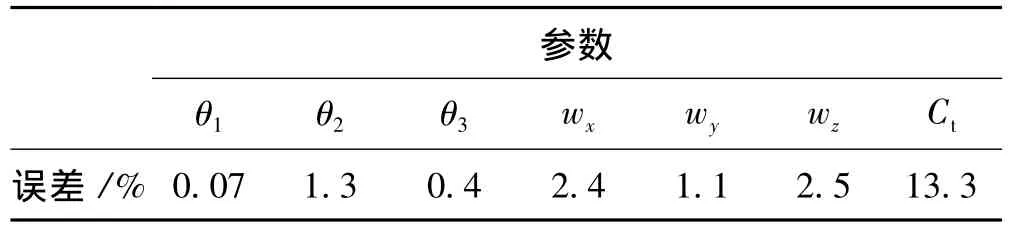
表2 平臺調平過程模型辨識仿真預測誤差
其中俯仰角、滾動角預測結果如圖2所示。
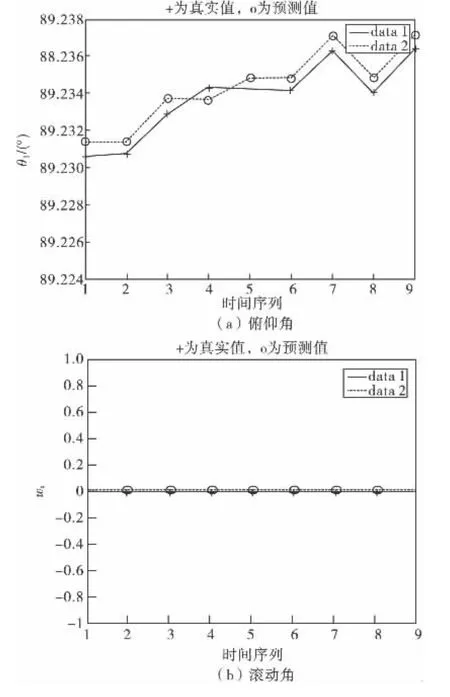
圖2 某導彈平臺調平仿真結果
4 結論
從仿真結果可以看出,支持向量回歸機對某導彈的平臺調平過程模型辨識精度比較高,其中俯仰角辨識精度最高,達到0.07%,調平輸出當量模型辨識精度較低,達到13.3%,總體預測精度達到2.56%,完全滿足了平臺模擬仿真的需求。
[1]杜樹新,吳鐵軍.用于回歸估計的支持向量機方法[J].系統仿真學報,2003,15(11):167-169.
[2]張心光,鄒早建.基于支持向量回歸機的傳播操縱響應模型辨識[J].上海交通大學學報,2011,16(4):228-231.
[3]尉詢楷,李應紅.基于支持向量機的航空發動機辨識模型[J].航空動力學報,2004,19(5):684-688.
[4]沈麗民,李軍顯.基于支持向量機的雷達高分辨距離像識別[J].彈箭與制導學報,2009,29(2):231-234.
[5]楊海波,洪貞啟,馬暄.潛射導彈捷聯慣性平臺快速調平補償方案研究[J].戰術導彈技術,2010(4):48-50.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
