車載紅外夜視系統行人告警算法研究
2014-10-25 05:26:44葛軍曉
激光與紅外 2014年8期
林 昱,周 陽,葛軍曉
(北京波譜華光科技有限公司,北京100015)
1 引言
近年來,夜間道路交通事故呈不斷上升趨勢,對行人及駕駛員的生命安全造成極大的威脅。車載紅外夜視告警系統因其潛在的巨大商業價值越來越受各大汽車廠商的青睞。其中,行人檢測算法是整個夜視告警系統的關鍵技術和難點所在。特別是對紅外圖像來說,數據位寬一般在12 bit以上,在嵌入式系統運算能力和處理速度一定的情況下,對行人檢測算法的復雜度和執行效率有著更加嚴格的要求。現有的行人檢測方法很多,比如基于梯度直方圖統計[1-2]的方法,在實際全圖檢測時存在檢測準確率低、檢測速度慢的缺點;“幀差法”[3]由于實現簡單常用于目標區域提取,但當環境變化較大時,往往不能穩定地表示場景;還有Masoud O的人體建模法[4],在建模復雜度、計算效率等方面也存在一定的局限。針對上述算法的缺點和不足,本文以單幀紅外圖像為基礎,旨在研究一種簡潔、快速的基于特征分析的行人檢測算法,以滿足工程應用準確性和實時性的要求。
2 紅外夜視系統行人告警算法原理
車載紅外夜視告警系統利用紅外熱成像技術,將接收到的汽車夜間行駛道路前方目標與背景的紅外輻射映射成灰度值,利用目標和背景間的溫度差進行行人檢測,彌補了可見光在夜間探測能力不足的缺陷。要從攝像頭采集到的紅外圖像中提取行人目標,實際上是屬于數字圖像處理中運動目標檢測的范疇。典型的行人檢測算法處理流程包括圖像去噪、閾值分割、目標提取、目標識別這幾個步驟[5],最終將檢測到的行人目標用告警框標識出來實現對行人的告警。圖1是奧迪A8推出的熱成像夜視助手效果圖。
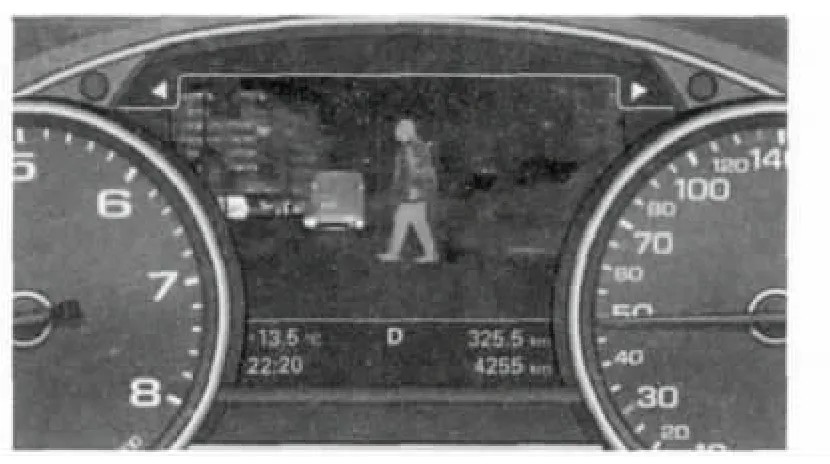
圖1 奧迪A8夜視輔助系統效果圖
3 本文的算法改進
針對引言部分提到的傳統算法存在的一些問題,本文在圖像分割和目標識別這兩個步驟做了一定的改進,整個算法處理流程如圖2所示。

圖2 行人檢測算法處理流程
3.1 圖像分割
與“幀差法”不同,本文算法在單幀圖像基礎上進行閾值分割。先用中值濾波法對原始紅外圖像數據進行去噪,然后再經過一個高通濾波器進行背景抑制。常用的高通濾波器分為空域和頻域兩類。若濾波器的輸入為函數f(x,y),輸出信號為g(x,y),設濾波器的脈沖響應函數為h(x,y),用“*”表示卷積運算,則:

這里采用5×5的空域高通模板H:
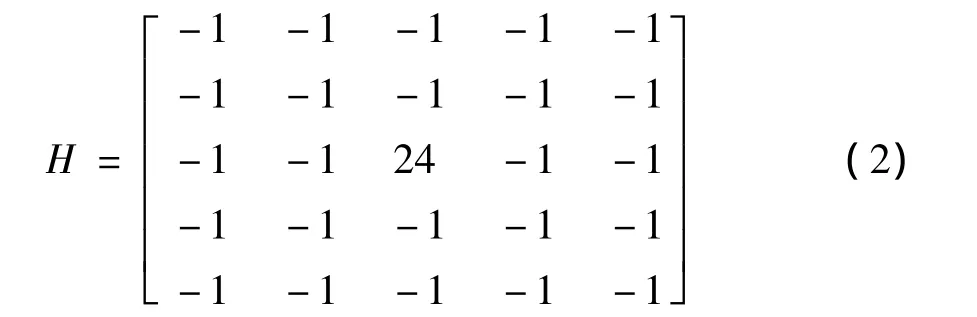
預處理后得到的圖像包含了背景噪聲、運動目標和邊緣區域,需選取一個合適的閾值進行“二值化”分割(環境背景等低灰度級像素置為“0”,行人、汽車發動機等灰度級較高的目標置為“1”)。二值化的閾值選取非常關鍵,閾值過高,會造成變化區域缺損和碎化,反之會引入大量背景噪聲。這里我們采用統計分割的方法來自適應求取分割閾值,其理論依據是預處理后圖像近似服從準高斯分布,隨機變量取均值三倍標準差鄰域之外的值的概率很小,而目標灰度值一般較高,容易處于三倍甚至更高倍數標準差之外,因此分割門限一般取均值累加三倍或更高倍數標準差。統計分割方法可以表示為:
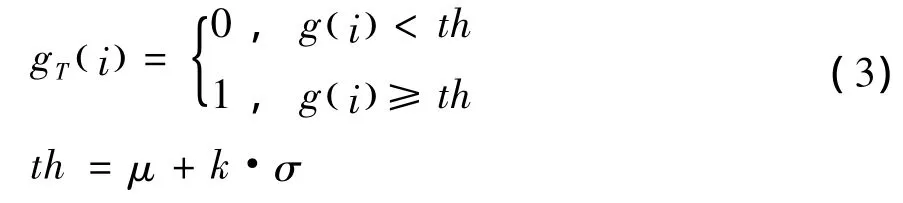
其中:
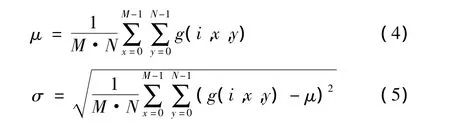
式中,M,N分別為圖像行數和列數;μ為均值;σ為標準差;th為分割閾值;取k=3。
閾值分割后,我們還需進一步修正二值圖像,采用形態學[6]“開運算”切斷細線,消除圖像邊緣毛刺和孤立點,平滑圖像邊界。因受復雜背景以及噪聲的影響,處理后的圖像中還會存在大量小面積連通區域,這些區域的面積明顯小于行人,可以設定一個面積閾值去除這些干擾區域,以減輕后續的計算量。
3.2 目標識別
在目標識別方面,本文先提取出單幀圖像內的各個候選目標,采用“連通域檢測算法”[7]對閾值分割后的二值圖進行區域標記。在區域標記的基礎上可以進行連通域分析,計算目標的幾何特征參數并根據機器視覺中行人的一些先驗知識來完成單幀內行人目標的篩選[8]。然后,再結合行人在相鄰幾幀內運動軌跡的連貫性和運動規律,進一步將一些與行人形狀、大小相似的虛警目標剔除掉得到最終的行人目標。這樣做的好處在于:采用連通域分析的參數計算量要遠小于模板匹配[9],同時考察連續幀圖像目標的空間分布和運動規律又彌補了僅對單幀圖像進行檢測準確度較差的缺陷。
本文中連通域分析用到的主要指標有外接矩形、面積、高寬比及形狀分散度[10]。外接矩形(式(6)~(9))是行人檢測中非常重要的信息,對標定行人的位置起到重要作用;高寬比C(式(10))、形狀分散度S(式(11))也是進一步獲得目標形狀特征相關的參數。根據已有的一些統計數據可知行人的高寬比有一定的范圍,大致在1.4~4這個區間。
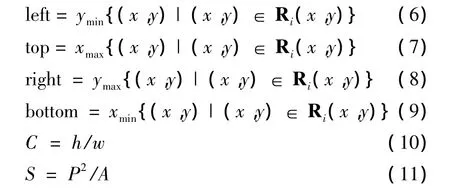
其中,C為連通區域高寬比;h為連通域高度;w為連通域寬度;形狀分散度S表示目標的復雜程度;P為連通域周長;A為連通域面積。
4 實驗結果和分析
根據以上算法,我們對室外夜間(環境溫度25℃)拍攝的簡單路況下的20組紅外視頻序列進行了算法仿真。采集用的光學系統焦距f=15 mm,F數1.0,探測器像元尺寸25 μm,紅外圖像分辨率為384×288像素,告警距離15~90 m。算法中閾值分割系數取k=3,小面積區域去除時面積閾值為30,高寬比C取1~4,形狀分散度在10~25之間,算法處理效果如圖3所示。根據實驗統計結果,在處理的所有視頻序列中,行人識別率達到85.2%以上,漏檢率在4%左右,處理幀頻大于20 Hz,在一定條件下滿足車載夜視系統對行人檢測算法檢測率和實時性的要求。
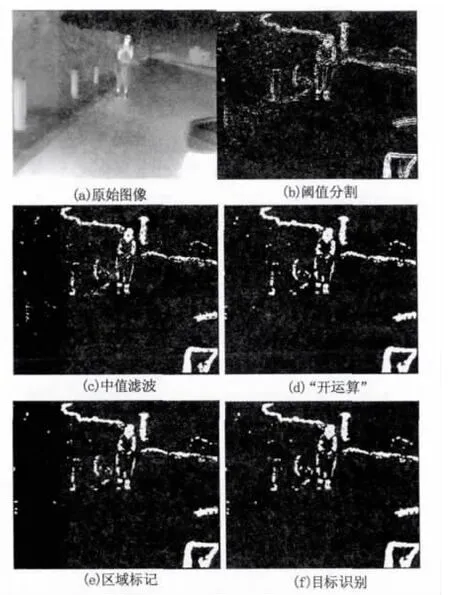
圖3 算法處理效果圖
5 結論
本文針對傳統行人檢測算法存在的一些問題,提出了基于單幀紅外圖像的特征分析算法,特別在圖像分割和連通域分析環節做了一定的改進并進行了驗證。但實驗采集的紅外道路圖像較典型,場景比較單一,引入的干擾因素也少;而實際的道路千變萬化,所拍攝的圖像也復雜多變,本文中提到的方法在處理中勢必會存在虛警增多等問題,且對于多個行人交疊一起的情況也存在漏檢現象。因此,要想實現運動行人的精確檢測,滿足智能車輛工程化要求,需要進一步改進算法,如增加對于復雜場景道路邊界模型的識別處理等。總之,要完善車載紅外夜視系統行人告警算法,深入研究準確、實時的提取運動目標是一項非常艱巨的任務。
[1] Navneet Dalal,Bill Triggs.Histograms of oriented gradients for human detection[C].CVPR,2005:886 -893.
[2] Dalal N,Triggs B.Histograms of oriented gradients for human detection[C]//Proc of the IEEE Conference on Computer Vision and Pattern Recognition,2005:886 -893.
[3] LIN Hongwen,TU Dan,LI Guohui.Moving objects detection method based on statistical background model[J].Computer Engineering,2003,29(16):97 - 99.(in Chinese)林洪文,涂丹,李國輝.基于統計背景模型的運動目標檢測方法[J].計算機工程,2003,29(16):97 -99.
[4] Masoud O,PapanikolopoulosN P.Robustpedestrian tracking using a model- based approach[C].Intelligent Transportation System,1997:338-343.
[5] SU Xiaoqian,SUNShaoyuan,GE Man,et al.Pedestrian detection and tracking of vehicle infrared images[J].Laser& Infrared,2012,42(8):949 -953.(in Chinese)蘇曉倩,孫韶媛,戈曼,等.車載紅外圖像的行人檢測與跟蹤技術[J].激光與紅外,2012,42(8):949 -953.
[6] 章毓晉.圖像處理和分析[M].北京:清華大學出版社,1999.
[7] XU Zhengguang.Pixel labeled algorithm based on recursive method of connecting area in binary images[J].Computer Engineering,2006,32(24):186 - 188.(in Chinese)徐正光.基于遞歸的二值圖像連通域像素標記算法[J].計算機工程,2006,32(24):186 -188.
[8] Elzein H,Lakshmanan S,Watta P.A motion and shape -based pedestrian detection algorithm[C].Intelligent Vehicles Symposium,Proceedings,IEEE,2003:500 -504.
[9] Gavrila D M,Philomin V.Real-time object detection for smart vehicle[C].Computer Vision,1999:87 -93.
[10] WANG Chenghao,LIU Fuqiang,TIAN Min,et al.The algorithm of vehicle identification and tracking based on blob analysis[J].Signal Processing,2005,21(4A):370 -374.(in Chinese)王臣豪,劉富強,田敏,等.基于Blob的車輛識別及其跟蹤算法研究[J].信號處理,2005,21(4A):370-374.
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44