基于熱釋電傳感器的時間差測距改進算法
2014-09-25 08:09:50劉前進
傳感器與微系統 2014年5期
趙 迪, 楊 衛, 劉前進
(1.中北大學 電子測試技術國家重點實驗室, 山西 太原030051; 2.中北大學 儀器科學與動態測試教育部重點實驗室,山西 太原 030051)
0 引 言
自然界中,任何溫度大于絕對零度的物體時刻都在向周圍空間進行紅外輻射[1]。熱釋電紅外探測器由于其成本低、功耗小、隱蔽性好,具有良好的環境適應性等優點而被廣泛應用[2,3]。熱釋電紅外傳感器能夠探測人體發出的微弱紅外信號,在有效范圍內實現對運動人體的檢測。近年來,使用熱釋電傳感器獲得開關量信號的技術已日臻成熟,而利用熱釋電傳感器進行人員的定位技術卻是一個全新的領域,尤其在探測目標距離方面,顯得少之又少。利用專門設計的裝置把紅外透鏡與熱釋電紅外傳感器相結合,代替了傳統使用的菲涅爾透鏡,進一步提高了探測距離,克服了熱釋電紅外線傳感器探測距離近的缺點,為人體距離探測方面的研究提供了方便。
本文對文獻[4]中未涉及到的問題進行了探討,進一步豐富和完善了時間差測距方法[4],并對改進后的算法進行了實驗驗證,取得了很好的效果。
1 時間差法測距原理
熱釋電傳感器探測單元都有一個探測視場角θ,由熱釋電傳感器本身的視場角和所用光學鏡片共同確定,當傳感器和光學鏡片選定后,該角度θ便被確定下來,為一個定值,即熱釋電傳感器所探測的區域是有限的[5],如圖1所示。
人員目標水平穿過探測視場時,會產生如圖2所示的波形圖[6]。其中,t1表示目標熱電信號正半軸時間,t2表示目標熱電信號負半軸時間,T表示目標信號出現的總時間,T=t1+t2。假定目標均是從圖1中A點位置處出發,運動方向從左至右,目標(人體)運動速度保持在步速為1.1~1.5 m/s(成人正常步速),在圖1所示的圖形中,利用幾何關系就可以測得目標與探測器之間的距離。
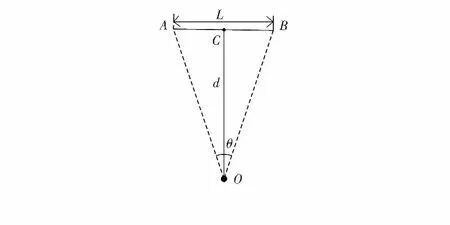
圖1 PIR探測視場示意圖
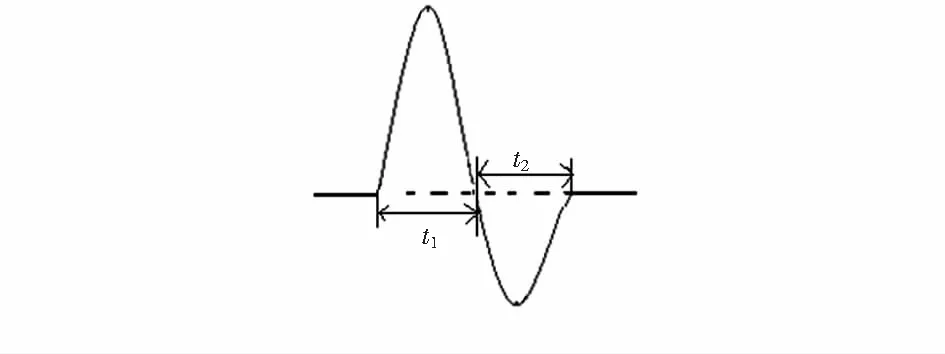
圖2 目標通過傳感器時信號波形圖
2 運動方向對時間差法測距的影響分析
當人員目標勻速穿過熱釋電探測視場,運動方向與熱釋電傳感器中軸線夾角不同時,產生的信號波形會發生很大的變化。圖3表示人員目標以不同角度橫向穿過傳感器探測視場時所產生的波形。
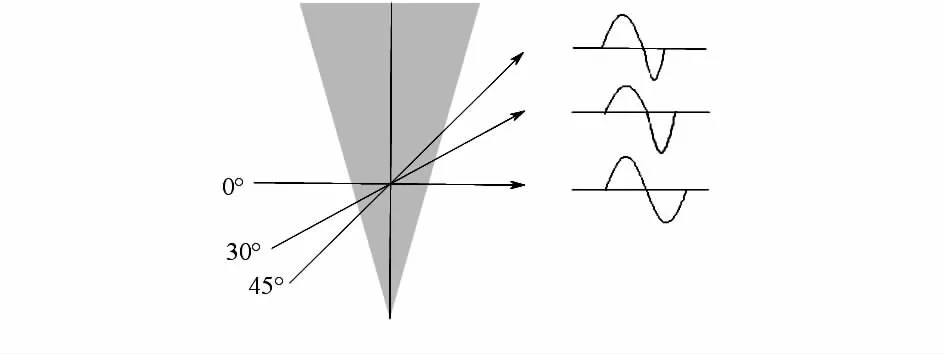
圖3 不同角度穿過探測視場產生的波形
由圖可以看出:人員入侵方向不一致時,所產生的波形發生很大的變化。當目標橫向穿過探測視場時,熱釋電信號波形是正區負區對稱的正弦信號;當目標斜切穿過探測視場時,波形改變較大,熱釋電信號正區負區不再對稱。因為峰—峰時間差法測距是建立在信號波形正區負區對稱的前提下,計算出信號的峰峰差值Δt。若信號波形正區負區不對稱,測距結果就會產生較大的誤差。
3 時間差測距改進算法
針對文獻[4]中峰—峰時間差法測距未涉及人員斜切進入傳感器探測視場的情況,先給出具體的算法流程。圖4為目標斜切視場路徑示意圖,假設目標運動路徑為AB段直線,其中,O點表示探測節點,d為目標距節點距離,點E為節點探測視場中軸線與0°方向直線(圖中CD段直線)交點,目標斜切視場運動角度為θ,l1,l2分別為目標從A點到E點的距離和從E點到B點的距離,l為點C到點E的距離,角度γ為加了紅外透鏡后的傳感器的1/2探測視場角,為已知量。設AB段總長度為l,由圖可知,在直角△OCE中,有
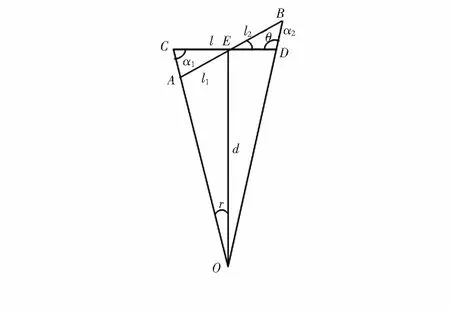
圖4 目標斜切視場路徑示意圖
l=d·tanγ,
(1)
(2)
在△ACE中,由正弦定理有
(3)
由以上三式得
(4)
在△EBD中,有
α2=π/2+γ,
(5)
(6)
結合式(5),式(6)有
(7)
(8)
又知AB=L
L=l1+l2,
(9)
(10)
對于一個確定目標的熱釋電信號來說,比例系數k與總時間T可通過信號處理中的統計學算法解算出來,從而由式(7)可以反推得到目標運動方向的角度θ,由式(10)可以反推得到運動目標距探測節點的距離d,從而便實現了目標距離的測量。
在目標距傳感器距離d,目標行進速度v,1/2探測視場角γ已知的情況下,通過計算確定距離確定角度下的比例系數k和總時間T,計算結果如表1,表2所示,其中,表1中由近至遠表示目標進入探測視場時靠近探測節點,目標出探測視場時較進入時而言遠離探測節點。在圖4中即是指目標從左側運動至右側過程中,目標從A點進從B點出;相反,由遠至近表示目標從B點進A點出。當目標從右側運動至左側過程中分析情況類似。
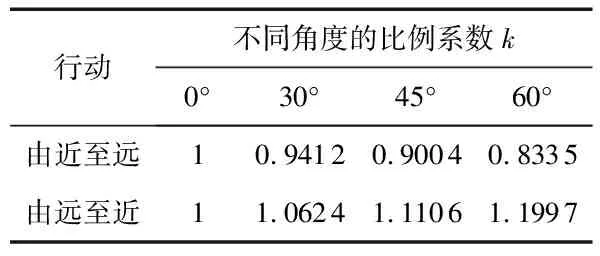
表1 確定角度下的比例系數k值計算結果

表2 確定距離和角度下的總時間T值計算結果
從實驗結果可以看出:比例系數k、總時間T與目標運動角度θ呈現線性對應關系。只要找出目標熱電信號中所蘊含的k與T值的信息,便能計算出目標沿不同角度方向穿過探測視場時相對探測節點的距離。
根據峰峰值時間差法測距原理,總時間T=2Δt,所以,求解總時間T的過程也就是求解峰峰值時間差Δt的過程,即可將對目標的測距轉換為解算熱釋電信號中所蘊含的k與Δt值的信息。圖5所示為斜切時間差法測距算法流程圖。
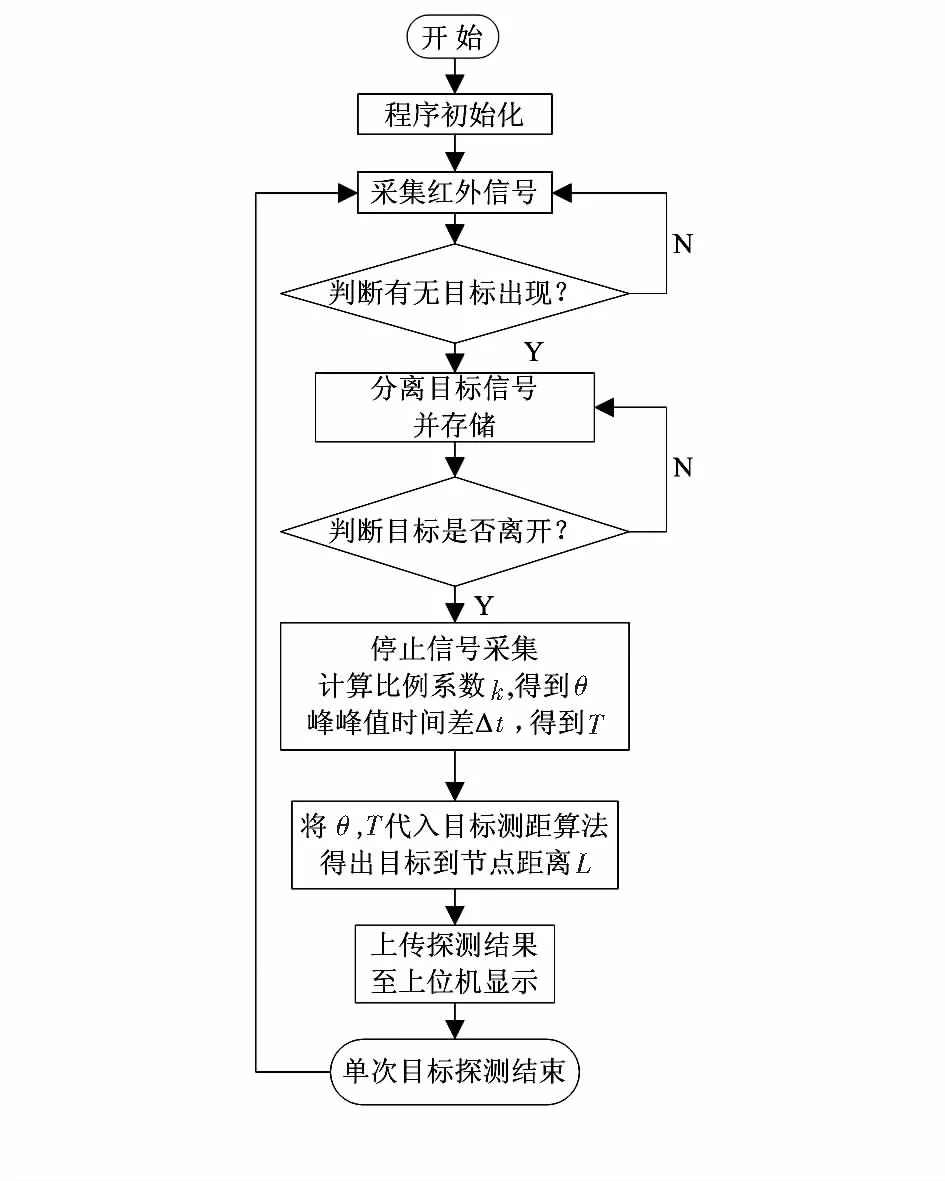
圖5 斜切時間差法測距算法流程圖
根據斜切時間差法測距算法編寫實驗程序,進行算法驗證實驗,表3所示為多次實驗數據的平均統計結果。
由表3所示實驗數據的統計結果可以看出:改進后的時間差測距算法較之前的時間差測距算法,測距精度得到了很大的提高,說明斜切時間差法測距算法是正確可行的。
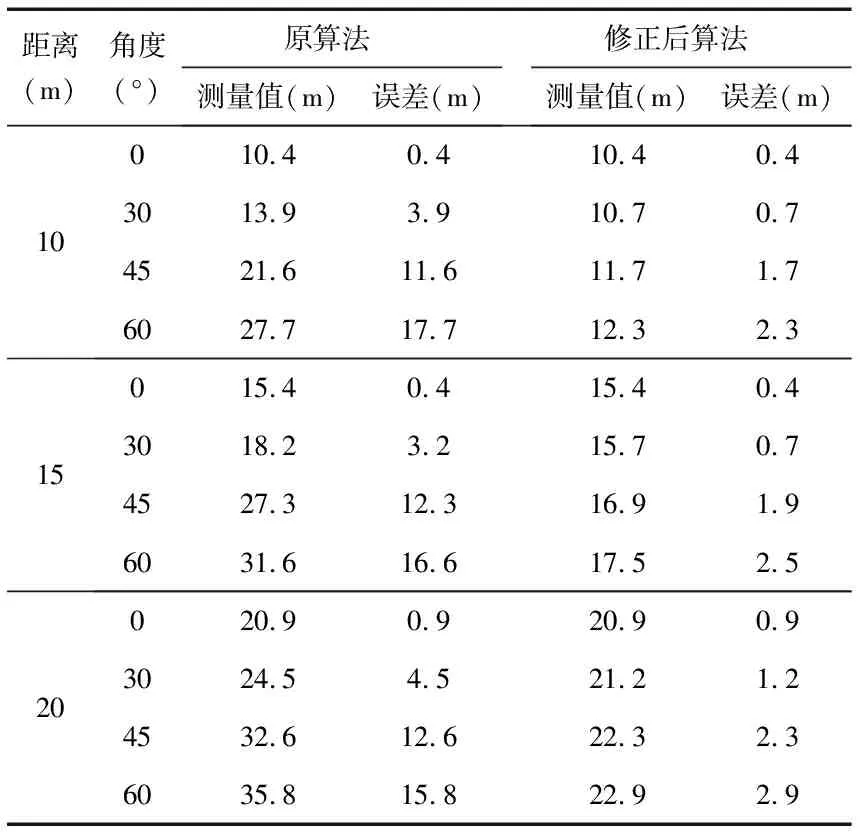
表3 目標斜切視場實測數據結果
4 結束語
峰—峰值時間差法測距是熱釋電傳感器較為全新的應用領域。本文對人員目標斜切進入探測視場的情況進行了闡述與分析,并利用統計學方法,在大量實驗的基礎上,求得經驗系數,通過對原來算法的改進和修正,計算出人員目標到傳感器節點的距離。結果表明:30 m范圍內該算法能夠大大提高測距精度,使誤差控制在可接受范圍之內,具有重要的研究意義和很高的實用價值。
參考文獻:
[1] 孫 喬,楊 衛,于海洋,等.動態下紅外熱釋電傳感器的目標定位方法[J].紅外與激光工程,2012,41(9):2288-2292.
[2] 辜文杰,方 宏.基于熱釋電效應的紅外人體檢測[J].電子世界,2012(13):48-49.
[3] 萬柏坤,馮 莉,明 東,等.基于熱釋電紅外信息的人體運動特征提取與識別[J].納米技術與精密工程,2012,10(3):249-256.
[4] 楊 衛,李波,孫 喬,等.基于熱釋電紅外傳感技術測距的時間差法研究[J].傳感器與微系統,2013,32(4):37-40.
[5] Zappi P,Farella E,Benini L.Tracking motion direction and distance with pyroelectric IR sensors[J].IEEE Sensors Journal,2010,10(9):1486-1494.
[6] Fang J S,Hao Q,Brady D J,et al.Path-dependent human identification using a pyroelectric infrared sensor and Fresnel lens arrays[J].Optics Express,2006,14(2):609-624.
