時變領航情況下多智能體網絡一致性分析與應用
2014-09-22 08:30:48冷傳英任偉建
東北石油大學學報 2014年2期
于 鏑,李 鋮,冷傳英,任偉建
(1.東北石油大學 電氣信息工程學院,黑龍江 大慶 163318; 2.大慶石化公司 熱電廠,黑龍江 大慶 163714)
0 引言
近年來,多智能體協調控制作為復雜系統和控制科學領域的前沿課題被人們關注,并且在航空航天、軍事、民用等方面得到廣泛應用[1-3].作為多智能體協調控制的基本問題,一致性問題在多機器人編隊[4]、群集[5-6]、任務分配[7]和傳感器網絡定位[8]等方面起重要作用,目的是通過設計分布式控制協議,使多智能體網絡中每個智能體的最終狀態趨于一致[9-10].
人們對個體動態為一階積分器的多智能體網絡進行研究[11-16].Jadbabaie A等基于最近鄰規則設計簡單的控制協議,采用非負矩陣理論討論無向固定網絡拓撲和切換網絡拓撲情況下的一致性問題,給出網絡實現一致的充分條件[11].在Jadbabaie A等研究基礎上,Olfati-Saber R等給出整個多智能體網絡的控制框架,將網絡一致性和控制系統穩定性聯系起來,分別討論無向圖、有向平衡圖情況下網絡的一致性和平均一致性問題[12].這些研究為多智能體網絡一致性分析和控制奠定理論基礎.Ren W等進一步討論有向拓撲網絡的一致性,應用矩陣理論給出最終一致解[13],并在Jadbabaie A等結論基礎上,研究有向切換拓撲網絡的一致性[14],拓寬對網絡拓撲的限制.Moreau L基于凸論和設定值Lyapunov理論研究多智能體網絡的穩定性問題[15].Lin Z等為一組移動智能體無向拓撲情況下的編隊問題提出3種不同控制方案,最終目標是靜態點[16].王垚等研究智能體網絡的量化一致性問題[17].
目前研究多為考慮無領航或領航者狀態恒定的情況,實際應用中,為了更快速有效地完成協調任務,在多智能體網絡中通常存在狀態時變的領航智能體.當協調目標為時變參考軌跡時,即網絡存在虛擬領航者,如在進行多車輛或多機器人編隊控制時,編隊中心的時變軌跡即為整個多智能體網絡的虛擬領航者.由于存在通信范圍和帶寬的限制,網絡中僅有部分個體能夠獲取領航者的狀態信息,因此在部分個體已知時變領航者狀態的情況下,有向拓撲網絡一致性問題的研究尤為重要.
筆者對時變領航情況下多智能體網絡進行一致性分析.首先,設計領航狀態信息為時變情況下的一致性控制算法,實現部分智能體已知領航狀態信息情況下的一致性追蹤,給出實現一致的充要條件及算法;然后,將此算法拓展至個體與領航者之間存在狀態偏差情況,提出基于偏差情況下的分布式控制算法,給出保持恒定偏差的充要條件及算法;最后,應用編隊仿真實驗驗證基于2種情況算法的控制協議的正確性.
1 理論基礎和問題描述
1.1 基于圖論的多智能體網絡的拓撲關系
網絡中智能體間的信息交換可用有向或無向圖G加以描述.首先令λn={1,2,…,n}代表指標集,圖G=(V,E)由節點集V(G)={vi,i∈λn}和邊集E(G)?{(vi,vj):i,j∈λn}構成.若(vi,vj)是圖G 的一個邊,那么vi稱為父節點,vj稱為子節點.在無向圖中邊均為無向,即節點vi和節點vj能夠互相獲取信息.有向圖是由一系列有序的邊(vi1,vi2),(vi2,vi3),…,(vi2n,vin+1)構成,其中vij∈V(G).若邊(vi,vj)存在,表示節點vj能夠獲取節點vi的信息,則鄰接矩陣元素aij>0;否則,aij=0,?i,j∈λn.網絡中智能體之間的拓撲關系用Laplacian矩陣L=[lij]∈Rn×n表示,其中
1.2 問題描述
考慮由n+1個智能體所構成的有向網絡,其中第i個跟隨智能體的動態表示為

式中:xi為第i個智能體的狀態,xi∈Rn;xi(0)為第i個智能體的初始狀態;ui為第i個智能體的控制輸入,ui∈Rn.
為不失一般性,令領航者為第n+1個智能體的狀態為xn+1=xr,動態為

式中:xr為領航者的狀態,xr∈Rn;f為非線性函數.
針對多智能體網絡,在只有部分智能體已知領航時變狀態xr(t)的情況下,基于鄰居信息設計控制協議ui,使多智能體網絡能夠漸近達成一致.主要考慮2種情況:
定義1 若對于任意的xi(0),i=1,…,n,當t→∞時,有xi(t)→xr(t),則稱該智能體網絡實現漸近跟蹤一致.
定義2 若對于任意的xi(0),i=1,…,n,當t→∞時,有xi(t)→xr(t)+其中為第i個智能體與領航者之間的期望狀態偏差,則稱該智能體網絡實現相對狀態保持期望偏差的漸進一致.
引理1[13]假設網絡狀態矢量x=[x1,x2,…,xp]T,xi∈R,L∈Rp×p滿足 Laplacian矩陣性質,情況等價:(1)L有一個和特征向量lp相對應的簡單0特征值,其他所有特征值存在正實部;(2)Lx=0意味著x1=x2=…=xn;(3)系統˙x=-Lx漸進趨于一致;(4)L的有向圖存在一個有向生成樹.
2 一致性跟蹤分析算法
考慮僅有部分智能體在已知時變領航狀態xr情況下,多智能體網絡(1)的跟蹤一致性問題.基于鄰居相對信息,提出一致性算法:

式中:ki為控制增益參數當智能體vi可以收到領航者的狀態信息時,ai(n+1)>0;否則,ai(n+1)=0.
定理1 考慮多智能體網絡(1),當且僅當網絡拓撲具有有向生成樹時,采用控制協議(3),可實現網絡的跟蹤一致.
證明:先證充分條件.當網絡拓撲具有有向生成樹時,由引理1可得-Ln+1x=0,則xi=xj=xn+1≡xr,i,j=1,2,…,n,即網絡實現漸近跟蹤一致.
再證必要條件.將控制協議(3)帶入網絡動態(1),可得


所以-Ln+1x→0,其中網絡狀態矢量為包含領航者在內的n+1個智能體所構成網絡的Laplacian矩陣

由引理1可得xi→xr,i=1,2,…,n,即網絡實現跟蹤一致,并且網絡拓撲具有有向生成樹.
3 相對狀態保持期望偏差的漸近一致性分析
在實際應用中,當考慮跟隨智能體與領航智能體之間存在恒定距離時,需要考慮相對狀態保持期望偏差的漸近一致問題.此時將算法(2)進一步拓展,提出一致性算法:

定理2 考慮多智能體網絡(1),當且僅當網絡拓撲具有有向生成樹時,采用控制協議(6),可實現相對狀態保持期望偏差的漸近一致.

先證明充分條件.當網絡拓撲具有有向生成樹時,由引理1可得=1,2,…,n;因為即網絡實現相對狀態保持期望偏差的漸近一致.
再證明必要條件.由于式(7)形同于協議(3),根據算法(3)必要條件的證明過程,由定理1可得→xr,i=1,2,…,n時,網絡拓撲具有有向生成樹,即當網絡拓撲具有有向生成樹.
4 仿真實驗
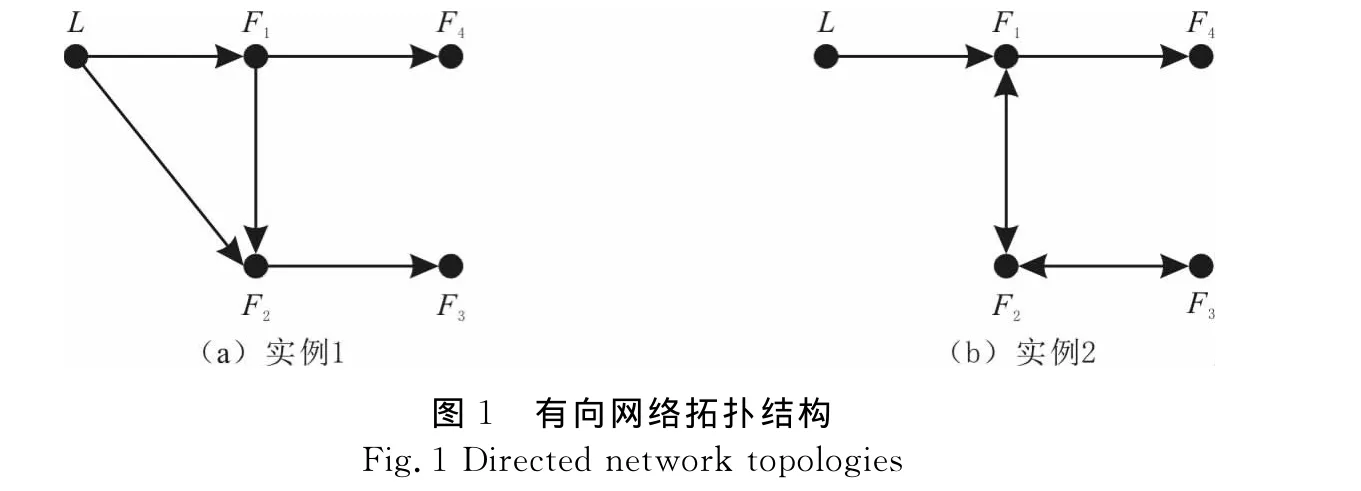
應用仿真實驗驗證文中算法的正確性,實驗中實例1和實例2分別針對算法(3)和算法(6)進行網絡一致性仿真研究,實例3應用算法(6)進行多車輛網絡的編隊控制.智能體之間的網絡拓撲結構見圖1,網絡中共5個智能體,其中L代表多智能體網絡中的虛擬領航者,Fi(i=1,2,3,4)分別代表多智能體網絡中的第i個跟隨者.
4.1 實例1
實例1有向網絡拓撲結構見圖1(a).由圖1(a)可見,只有智能體1和2能夠收到領航智能體的狀態信息,并且該有向拓撲具有有向生成樹,滿足定理1條件.令虛擬領航者的狀態為時變函數f(t,xr)=cos t,針對多智能體網絡(1)采用控制算法(3),得到各個智能體的狀態變量軌跡(見圖2).由圖2可見,所有智能體的狀態漸近趨于一致,并且收斂于領航者的狀態,實現一致性跟蹤,與定理1結論符合.
4.2 實例2
實例2有向網絡拓撲結構見圖1(b).由圖1(b)可知,只有智能體1能夠收到領航智能體的狀態信息,并且該有向拓撲具有有向生成樹,滿足定理2條件.令虛擬領航者的狀態為時變函數f(t,xr)=cos t,并且令第i個智能體與領航狀態位置的理想偏差為δei=1-i,i=1,2,3,4.針對多智能體網絡(1)采用控制算法(6),得到各個智能體的狀態變量軌跡(見圖3).由圖3可見,所有智能體的狀態與領航者狀態通過快速調整之后漸近保持恒定偏差,實現相對狀態保持期望偏差的漸近一致,與定理2結論符合.

4.3 實例3
實例3驗證算法(6)在多智能體網絡編隊控制中的有效性,考慮由4個移動車輛所構成網絡的編隊控制,有 向 網 絡 拓 撲 見 圖 1(b).令 xr=[30sin(πt/100),20sin(πt/50)],為編隊中心,4個移動車輛與編隊中心的期望偏差為編隊隊形在t為0,10,20,25,30,35s時的隊形見圖4.由圖4可見,在初始時刻,車輛之間隊形不規則,在左右車輛網絡漸近具有理想編隊隊形,并且在t為20s后一直保持穩定的理想隊形.

5 結束語
針對一階多智能體網絡在有向固定通信拓撲情況下,只有部分個體已知時變領航參考狀態的一致性問題,提出一致性控制協議,并通過圖論、矩陣論及穩定性理論提出實現跟蹤時變領航一致的充要條件及控制算法.將該控制算法拓展到智能體間具有固定相對狀態偏差的情況,給出實現具有固定相對偏差一致的充要條件及控制算法,并將該控制算法應用到多移動車輛網絡編隊控制中.通過3個實例仿真實驗驗證基于文中算法的控制協議,實例1驗證當且僅當網絡拓撲具有有向生成樹時,文中算法控制協議可以解決部分智能體在已知時變參考狀態情況下的一致性追蹤問題;實例2應用基于拓展算法的控制協議,驗證所有智能體的狀態與領航者狀態能夠漸近保持恒定偏差,實現相對狀態保持期望偏差的漸近一致;實例3將相對狀態偏差算法引入到多車輛的編隊控制中,拓展多智能體編隊的控制方法.
(References):
[1]Zou Yunfei,Prabhakar R P.Distributed formation control of multiple aircraft using constraint forces[C].Seattle:American Control Conf.,2008:644-649.
[2]Liu Huagang,Fang Hao,Mao Yutian.Distributed flocking control and obstacle avoidance for multiagent systems[C].Xuzhou:Chinese Control Conf.,2010:4536-4541.
[3]Yan Jing,Guan Xinping,Luo Xiaoyuan.Multi-target pursuit formation of multi-agent systems[J].Chinese Physics B,2011,20(1):698-707.
[4]Jos'e Rodrigues,Dario Figueira.Leader-following graphbased distributed formation control[C].Aveiro:Proceedings of Robotica,2008:71-77.
[5]Olfati-Saber R.Flocking for multi-agent dynamic systems:algorithmsand theory [J].IEEE Transactions on Automatic Control,2006,51(3):401-420.
[6]Tanner H G,Jadbabaie A,Pappas G J.Stable flocking of mobile agents,partⅡ:dynamic topology[C].Hawaii:Proceedings of the IEEE Conference on Decision and Control,2003:2016-2021.
[7]Alighanbari M,How J.Decentralized task assignment for unmanned air vehicles[C].Seville:Proceedings of IEEE Conference on Decision and Control,2005:5668-5673.
[8]Olfati-Saber R,Shamma J S.Consensus filters for sensor networks and distributed sensor fusion[C].Seville:Proceed-ings of IEEE Conference on Decision and Control,2005:6698-6703.
[9]Ren W,Beard R W,Atkins E M.Information consensus in multivehicle cooperative control[J].IEEE Control Syst.Mag.,2007,27(2):71-82.
[10]Olfati-Saber R,Fax J A,Murray R M.Consensus and cooperation in networked multi-agent systems[J].IEEE Transactions on Automatic Control,2007,46(3):215-233.
[11]Jadbabaie A,Lin J,Morse A S.Coordination of groups of mobile autonomous agents using nearest neighbor rules[J].IEEE Transactions on Automatic Control,2003,48(6):988-1001.
[12]Olfati-Saber R,Murray R M.Consensus problems in networks of agents with switch in topology and time-delays[J].IEEE Transactions on Automatic Control,2004,49(9):1520-1533.
[13]Ren W,Beard R W,McLain T W.Coordination variables and consensus building in multiple vehicle systems[M].Lecture Notes in Control and Information Sciences,New York:Springer-Verlag,2004:171-188.
[14]Ren W,Beard R W.Consensus seeking in multi-agent systems under dynamically changing interaction topologies[J].IEEE Transactions on Automatic Control,2005,50(5):655-661.
[15]Moreau L.Stability of multi-agent systems with time-dependent communication links[J].IEEE Transactions on Automatic Control,2005,50(2):169-182.
[16]Lin Z,Broucke M,Francis B.Local control strategies for groups of mobile autonomous agents[J].IEEE Transactions on Automatic Control,2004,49(4):622-629.
[17]王垚,伍清河,王寅秋.切換拓撲一階積分器網絡量化趨同控制[J].控制與決策,2013,28(3):429-433.Wang Yao,Wu Qinghe,Wang Yinqiu.Quantized consensus of first-order Integrator networks with switehing topologies[J].Control and Decision,2013,28(3):429-433.
[18]紀良浩,廖曉峰.具有不同時延的多智能體系統一致性分析[J].物理學報,2012,61(15):150-202.Ji Lianghao,Liao Xiaofeng.Consensus analysis of multi-agant system with multiple time delays[J].Acta Physica Sinica,2012,61(15):150-202.
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學問題(2021年4期)2021-11-05 07:02:34
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46