一種用于復(fù)合軸系統(tǒng)的機(jī)動目標(biāo)跟蹤算法*
2014-09-20 09:27:30尹小杰
彈箭與制導(dǎo)學(xué)報 2014年2期
袁 佳,尹小杰,柯 芳,吳 斌,樊 鍵,程 川
(1西南技術(shù)物理研究所,成都 610041;2空軍駐川西軍事代表室,成都 610041)
0 引言
復(fù)合軸ATP系統(tǒng),通過分別控制主軸工作范圍大,但帶寬較窄、精度較低的大口徑望遠(yuǎn)鏡與子軸工作范圍較小,但頻率寬、響應(yīng)快、精度高快速反射鏡(fast steering mirror,F(xiàn)SM)同時工作,以實(shí)現(xiàn)大范圍的快速高精度跟蹤。其原理如圖1所示。

圖1 雙探測器型結(jié)構(gòu)原理圖
根據(jù)復(fù)合軸ATP系統(tǒng)的特點(diǎn),可構(gòu)建一個垂直于望遠(yuǎn)鏡所在水平面的y、z二維平面,并可推算出目標(biāo)航跡位于y、z平面上投影的狀態(tài)觀測量。這里,主系統(tǒng)觀測量中只考慮粗探測器測得的脫靶量,而子系統(tǒng)觀測量則是在前者的基礎(chǔ)上引入了的精探測器測得的脫靶量后的重構(gòu)結(jié)果。借助子系統(tǒng)的特點(diǎn),第二套觀測量將更加精確,從而提升跟蹤精度。
而文中目標(biāo)跟蹤算法的任務(wù),就是要通過對上述兩組主、子系統(tǒng)觀測量的數(shù)據(jù)處理,以實(shí)現(xiàn)對目標(biāo)運(yùn)動狀態(tài)的實(shí)時估計與辨識。使得主系統(tǒng)的控制得到直接改善,進(jìn)而使子系統(tǒng)的控制精度也隨之提高,從而達(dá)到優(yōu)化復(fù)合軸系統(tǒng)整體控制性能的目的;且當(dāng)探測器觀測信號被動中斷時,使系統(tǒng)仍能根據(jù)目標(biāo)航跡辨識結(jié)果保持一段時間的記憶跟蹤,等待信號恢復(fù),以減小目標(biāo)丟失的概率。
1 跟蹤算法發(fā)展現(xiàn)狀
建立合適的運(yùn)動模型和選用簡單有效的濾波器,是解決機(jī)動目標(biāo)跟蹤問題的核心內(nèi)容。目前,比較典型的運(yùn)動描述模型如:勻速CV模型、勻加速CA模型、R.A.singer提出的 Singer模型[1]、周宏仁等提出的“當(dāng)前”統(tǒng)計模型[2]、F.Berg提出的 Berg模型[3]、T.L.Song提出的 Song模型[4]及由 Mehrotra K 和Mahapatra P R提出的高度機(jī)動目標(biāo) (Jerk)模型[5]等;濾波算法方面,在經(jīng)典算法維納濾波、α-β-γ濾波、卡爾曼濾波等的基礎(chǔ)上,又出現(xiàn)了一些新的自適應(yīng)濾波算法,如文獻(xiàn)[6]采用的變維濾波、文獻(xiàn)[7]中強(qiáng)跟蹤濾波器、文獻(xiàn)[8]中粒子濾波、文獻(xiàn)[9]中模糊自適應(yīng)算法等。
為了應(yīng)對機(jī)動目標(biāo)的運(yùn)動特征,于是出現(xiàn)了多模型混合系統(tǒng)。典型的如Blom和Bar-Shalom提出了一種交互式的多模型濾波器(IMM),目標(biāo)狀態(tài)由多個濾波器交互作用得到[10]。IMM算法是滿足模型完備性與互斥性條件下的最優(yōu)估計,有非線性濾波優(yōu)勢,目前是比較適用于高機(jī)動目標(biāo)的跟蹤算法。

圖2 IMM算法示意圖
2 機(jī)動目標(biāo)跟蹤算法的提出
2.1 算法思路
在IMM模型集構(gòu)建時,若取得過于簡單,則不能覆蓋機(jī)動運(yùn)動;若模型集中的運(yùn)動模型種類過于復(fù)雜,將導(dǎo)致計算量加大及模型間多余競爭,使跟蹤性能下降。于是文中提出如下思路:在主、子系統(tǒng)中采用各自的IMM運(yùn)動模型集,對兩組系統(tǒng)觀測量進(jìn)行獨(dú)立濾波估計;然后把兩組估計量通過分布式數(shù)據(jù)融合以實(shí)現(xiàn)主、子系統(tǒng)估計的優(yōu)化組合,并將融合后的估計量作為主、子系統(tǒng)脫靶量計算及記憶跟蹤航跡預(yù)測的依據(jù)。
2.2 算法方案的展開
首先設(shè)定:機(jī)動目標(biāo)加速度范圍為[-amax,amax],轉(zhuǎn)彎速率范圍為;主、子系統(tǒng)位于 y、z平面上目標(biāo)狀態(tài)觀測量已經(jīng)推算得出,且所涉及的系統(tǒng)噪聲及觀測噪聲都為零均值高斯白噪聲。
2.2.1 主、子系統(tǒng)獨(dú)立濾波階段
1)主系統(tǒng)IMM-CT方案:CT模型使用于目標(biāo)在平面中做勻速圓周運(yùn)動模式。現(xiàn)將均分成n1-1段,以端點(diǎn)及節(jié)點(diǎn)值為轉(zhuǎn)彎速率構(gòu)建n1個CT模型組成主系統(tǒng)IMM模型集。各模型通過獨(dú)立卡爾曼濾波,再進(jìn)行實(shí)時交互計算,得出主系統(tǒng)狀態(tài)估計向量,同時提出用于數(shù)據(jù)融合的判別矩陣。設(shè)n時刻,主系統(tǒng)狀態(tài)估計向量(元素依次表示目標(biāo)y方向位置、速度、z方向位置、速度)為:

模型概率向量及n1個模型卡爾曼估計誤差自相關(guān)矩陣分別為 μΙ(n)、PΙm(n)(m=1,2,…,n1,分別表示模型集中n1個模型),取:

則n時刻,主系統(tǒng)y、z方向的判別矩陣取為:
2)子系統(tǒng)IMM-CA方案:子系統(tǒng)中采用兩塊相互獨(dú)立的快速反射鏡,實(shí)現(xiàn)對激光光束在方位和俯仰方向上的控制,于是將目標(biāo)的運(yùn)動航跡分解到y(tǒng)軸和z軸上獨(dú)立分析。這里選用適于描述勻加速直線運(yùn)動的CA模型構(gòu)建模型集,于是現(xiàn)將[-amax,amax]均分成n2-1段,以端點(diǎn)及節(jié)點(diǎn)值為加速度構(gòu)建n2個CA模型組成子系統(tǒng)IMM模型集,同樣選用卡爾曼濾波器對目標(biāo)狀態(tài)做出關(guān)于y、z方向的實(shí)時估計。
設(shè)n時刻,子系統(tǒng)狀態(tài)估計向量(元素依次表示兩個坐標(biāo)軸方向的位置、速度、加速度)為:



則n時刻,子系統(tǒng)y、z方向的判別矩陣取為:

2.2.2 主、子系統(tǒng)數(shù)據(jù)融合階段
文中采用分布式融合系統(tǒng)的思想,即各傳感器獨(dú)立濾波,而融合單元輸出的最終估計量為主、子系統(tǒng)各自估計量的線性優(yōu)化組合,若n時刻某傳感器的估計精度差,則它對最終估計的貢獻(xiàn)就比較小。取自估計誤差自相關(guān)矩陣的判別矩陣 My、Mz、Ny、Nz也正是為了體現(xiàn)估計精度。文中在主系統(tǒng)模型集中引入了CT模型,以應(yīng)對目標(biāo)蛇形運(yùn)動,但此模型對目標(biāo)做加速運(yùn)動時的狀態(tài)估計效果不理想。于是,引入了自適應(yīng)的調(diào)節(jié)系數(shù),把狀態(tài)最終估計誤差控制在一定范圍內(nèi)。這里:

式中 α1、β1、α2、β2的取值應(yīng)根據(jù)具體的觀測噪聲及系統(tǒng)噪聲特性來選定,經(jīng)過調(diào)試,使系統(tǒng)處于較優(yōu)狀態(tài)。則改進(jìn)后的數(shù)據(jù)融合結(jié)果可為:
2.2.3 目標(biāo)運(yùn)動模式綜合辨識階段
此階段、將根據(jù)狀態(tài)最終估計量辨識出y、z軸上的加速度、轉(zhuǎn)彎速率等運(yùn)動特性。用于觀測信號被動中斷時,推測目標(biāo)的運(yùn)動模式以實(shí)現(xiàn)記憶跟蹤。
3 MATLAB算法仿真
設(shè)定一個以望遠(yuǎn)鏡所在位置為原點(diǎn),初始位置為[4000m 6000m 4000m]的隨機(jī)機(jī)動目標(biāo),其航跡在y、z平面投影如下:以[-172m/s 346m/s]的初速度,1~55s勻速直線運(yùn)動,56~150s以1g(g=9.8m/s2)轉(zhuǎn)彎速率勻速轉(zhuǎn)彎,151~181s以ax=-5m/s2、ay=-18m/s2勻加速運(yùn)動,182~ 255s以-2.7g轉(zhuǎn)彎速率勻速轉(zhuǎn)彎,256~284s勻速直線運(yùn)動,285~324s以3g轉(zhuǎn)彎速率勻速轉(zhuǎn)彎,325~344s以ax=8m/s2、ay=4m/s2勻加速運(yùn)動,345~379s以-1.8g轉(zhuǎn)彎速率勻速轉(zhuǎn)彎,380~400s勻速直線運(yùn)動,如圖3所示。主系統(tǒng)兩方向觀測噪聲方差為25m2,CT模型勻速直線模式和勻速轉(zhuǎn)彎模式時的系統(tǒng)噪聲方差分別為3.5m2和6.5m2,子系統(tǒng)兩方向觀測噪聲方差為16m2,CA模型勻速直線模式和勻加速直線模式時的系統(tǒng)噪聲方差分別為3m2和9m2,主、子系統(tǒng)采樣周期都為1s。
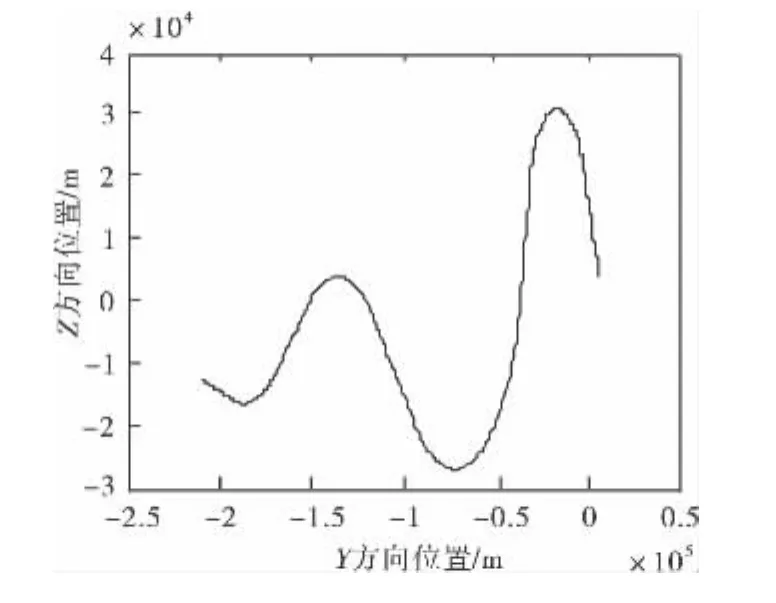
圖3 機(jī)動目標(biāo)航跡在y、z平面的投影
1)圖4~圖6為相同邊界條件下,文中算法與經(jīng)典“當(dāng)前”模型算法分別做100次蒙特卡羅狀態(tài)估計仿真結(jié)果的比較。

圖4 經(jīng)典“當(dāng)前”模型下y軸方向位置跟蹤

圖5 文中算法y軸方向位置跟蹤

圖6 改進(jìn)后的算法y軸方向位置跟蹤
2)本算法1次試驗(yàn)對運(yùn)動模式特性辨識舉例(見圖7)。

圖7 文中的算法1次試驗(yàn)對運(yùn)動模式特性辨識
比較圖5和圖6可見:通過基礎(chǔ)分布式數(shù)據(jù)融合后的估計量,誤差量較主、子系統(tǒng)都有所減小,但當(dāng)特定情況下某分系統(tǒng)誤差陡增時,其應(yīng)對能力欠佳。引用改進(jìn)的數(shù)據(jù)融合方法后,一定程度上抑制了上述不良情況,使最終估計結(jié)果更加準(zhǔn)確。
通過MATLAB仿真可見:文中算法與采用“當(dāng)前”統(tǒng)計模型的典型算法相比,其跟蹤精度更優(yōu),且誤差收斂速度相當(dāng);從用于記憶跟蹤的角度分析,文中算法可以較準(zhǔn)確地辨識出機(jī)動目標(biāo)的位置、速度及轉(zhuǎn)彎速率信息,為航跡預(yù)測提供依據(jù)。而“當(dāng)前”模型只能估計出目標(biāo)航跡切線方向上的速度及加速度,應(yīng)對目標(biāo)蛇形運(yùn)動模式下的記憶跟蹤比較困難;從計算量的角度分析,由于采用了數(shù)據(jù)融合,計算量將大于“當(dāng)前”模型,但通過文中方案的處理使得各運(yùn)動模型的轉(zhuǎn)移矩陣得以固定,只需事先寫入程序而不用在每次濾波時重新計算,從而在不影響精度的情況下將運(yùn)算量控制在適中范圍。
4 結(jié)論
文中提出的用于復(fù)合軸系統(tǒng)的目標(biāo)跟蹤算法方案,采用不同的IMM模型集的估計結(jié)果做數(shù)據(jù)融合,從而實(shí)現(xiàn)以相對少的運(yùn)動模型種類覆蓋更復(fù)雜的運(yùn)動模式同時優(yōu)化估計結(jié)果的目的。本算法易于計算機(jī)編程實(shí)現(xiàn),且可根據(jù)系統(tǒng)要求調(diào)整n1、n2的取值,以調(diào)節(jié)跟蹤精度。
值得注意的是:本方案引用的卡爾曼濾波器,是根據(jù)系統(tǒng)噪聲方差和量測噪聲方差實(shí)時修正濾波增益陣的,所以需要預(yù)先得到具體情況下系統(tǒng)噪聲和觀測噪聲的統(tǒng)計特性,這是保證算法準(zhǔn)確的前提之一;同時,對被跟蹤目標(biāo)的運(yùn)動特性有一定程度的了解,也將有助于提高算法的精確度。
[1]R A Singer.Estimating optimal tracking filter performance for manned maneuvering targets[J].IEEE Transactions on Aerospace and Electronic Systems,1970,6(4):473-483.
[2]周宏仁,敬忠良,王培德.機(jī)動目標(biāo)跟蹤[M].北京:國防工業(yè)出版社,1991.
[3]F Berg.Estimation and prediction for maneuvering target trajectories[J].IEEE Transactions on Automation Control,1983,28(3):294-304.
[4]T L Song.Suboptimal filter design with pseudo measure for target tracking[J].IEEE Transactions on Aerospace and Electronic Systems,1988,24(1):28-39.
[5]Mehrotra K,Mahapatra P R.A jerk model for tracking highly maneuvering targets[J].IEEE Transactions on Aerospace and Electronics Systems,1997,33(4):1094-1105.
[6]錢瓊芬,徐毓,金宏斌.變維交互作用多模型濾波方法[J].計算機(jī)測量與控制,2005,13(8):830-832.
[7]Yang Liu,Ma Zhao,Qinzhang Wu.A new hybrid grid multiple model estimation based on STF[J].Journal of Computers,2012,7(7):1607-1614.
[8]Yuan L,Zheng Y F,Zhu J,et al.Object tracking with particle filtering in fluorescence microscopy images:Application to the motion of neurofilaments in axons[J].IEEE Transactions on Medical Imaging,2011,31(1):117-130.
[9]唐磊,趙春霞,唐振民.基于模糊自適應(yīng)Kalman濾波的GPS/DR數(shù)據(jù)融合[J].控制理論與應(yīng)用,2007,24(6):891-894.
[10]Mazor E,Averbuch A,Bar-Shalom Y,et a1.Interacting multiple model methods in target tracking:A survey[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(1):103-123.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
