剪切粘滯阻尼器在線消除油膜支承轉(zhuǎn)子碰摩振動研究
2014-09-08 03:09:04黃秀金何立東
振動與沖擊 2014年16期
黃秀金,何立東,王 锎
(北京化工大學(xué) 機(jī)電工程學(xué)院,北京 100029)
旋轉(zhuǎn)機(jī)械中轉(zhuǎn)、定子發(fā)生碰摩為常見故障[1]。轉(zhuǎn)子與定子碰摩屬后繼故障(Secondary Malfunction), 即一般由旋轉(zhuǎn)機(jī)械其它故障引起,如不平衡、不對中、轉(zhuǎn)軸彎曲、裝配不當(dāng)及軸承或密封圈中流體失穩(wěn)激勵等[2]。碰摩的產(chǎn)生等于增加轉(zhuǎn)子的支撐條件,但此附加支撐不穩(wěn)定,會引起不穩(wěn)定及非線性振動[3];因此,碰摩為轉(zhuǎn)子系統(tǒng)發(fā)生失穩(wěn)的重要原因,以致轉(zhuǎn)子系統(tǒng)一系列不良后果。碰摩故障輕者使機(jī)器振動過大、產(chǎn)生噪聲、轉(zhuǎn)軸發(fā)生熱彎曲等, 使旋轉(zhuǎn)機(jī)械效率、性能大幅降低;重者會激發(fā)轉(zhuǎn)軸大幅、高頻振動響應(yīng),在幾秒鐘內(nèi)造成密封件嚴(yán)重破壞或斷軸導(dǎo)致整機(jī)損毀。采用抑振措施進(jìn)行碰摩控制,具有較大工程價值。對被動或主動抑制碰摩的研究已取得一定成果。Dai 等[4]采用剎車片方法控制干摩擦反向渦動響應(yīng),實驗結(jié)果顯示,摩擦片可將干摩擦失穩(wěn)的劇烈碰摩降為穩(wěn)定的局部碰摩響應(yīng)。Karpenko 等[5]對Jeffcott 轉(zhuǎn)子系統(tǒng)碰摩研究中發(fā)現(xiàn)通過增加預(yù)緊力及阻尼可使系統(tǒng)更穩(wěn)定。Pavlovskaia 等[6]在定子外附加帶預(yù)載荷減震圈,但因預(yù)載荷會增加系統(tǒng)剛度,碰摩過程減震圈會跳動,振幅也會發(fā)生波動,與文獻(xiàn)[7]一致。Ishida[8]采用軸承導(dǎo)向器抑制碰摩引起的轉(zhuǎn)子振動,實驗表明將X,Y方向剛度調(diào)至大于某一特定值時, 碰摩響應(yīng)轉(zhuǎn)變?yōu)樾≌穹l振動。Ulbrich 等[9]對相關(guān)控制方法理論與實驗進(jìn)行研究,利用研制的電磁制動器,用反饋控制方法在線消除碰摩振動。Keogh 等[10]進(jìn)行電磁軸承的應(yīng)急輔助軸承上主動抑制碰摩力度理論及實驗研究,并取得一定減振效果。
本文提出在轉(zhuǎn)軸上安裝新型剪切粘滯阻尼器方法抑制碰摩振動,該阻尼器無需控制,穩(wěn)定性、可靠性較好,且減振效果明顯,具有較好工程應(yīng)用背景。雖實際工作中轉(zhuǎn)子系統(tǒng)大多為多盤轉(zhuǎn)子系統(tǒng),但對每個碰摩轉(zhuǎn)子而言碰摩機(jī)理、碰摩運(yùn)動規(guī)律與單盤轉(zhuǎn)子基本相同。為研究方便,以單盤即滑動軸承碰摩轉(zhuǎn)子系統(tǒng)為例用有限元法分析討論該剪切粘滯阻尼器對碰摩振動響應(yīng)的抑制作用,并設(shè)計相應(yīng)實驗平臺進(jìn)行驗證。
1 碰摩轉(zhuǎn)子-滑動軸承系統(tǒng)失穩(wěn)機(jī)理有限元分析
1.1 轉(zhuǎn)子系統(tǒng)有限元模型
為研究方便,對碰摩轉(zhuǎn)子進(jìn)行簡化,即轉(zhuǎn)子采用單盤轉(zhuǎn)子,兩端由兩相同滑動軸承支撐。并設(shè)轉(zhuǎn)子與定子為圓周局部彈性碰摩模型,即不考慮碰摩過程中摩擦熱效應(yīng)。模型碰摩轉(zhuǎn)子軸承系統(tǒng)見圖1,轉(zhuǎn)子整周局部碰摩力模型見圖2。圖2中O為轉(zhuǎn)子形心,F(xiàn)n為徑向摩擦力,F(xiàn)為切向摩擦力,Ψ為碰摩點法向與x軸夾角,φ為轉(zhuǎn)子質(zhì)心繞形心轉(zhuǎn)角,ω為轉(zhuǎn)子角速度,e為轉(zhuǎn)子軸心位移。
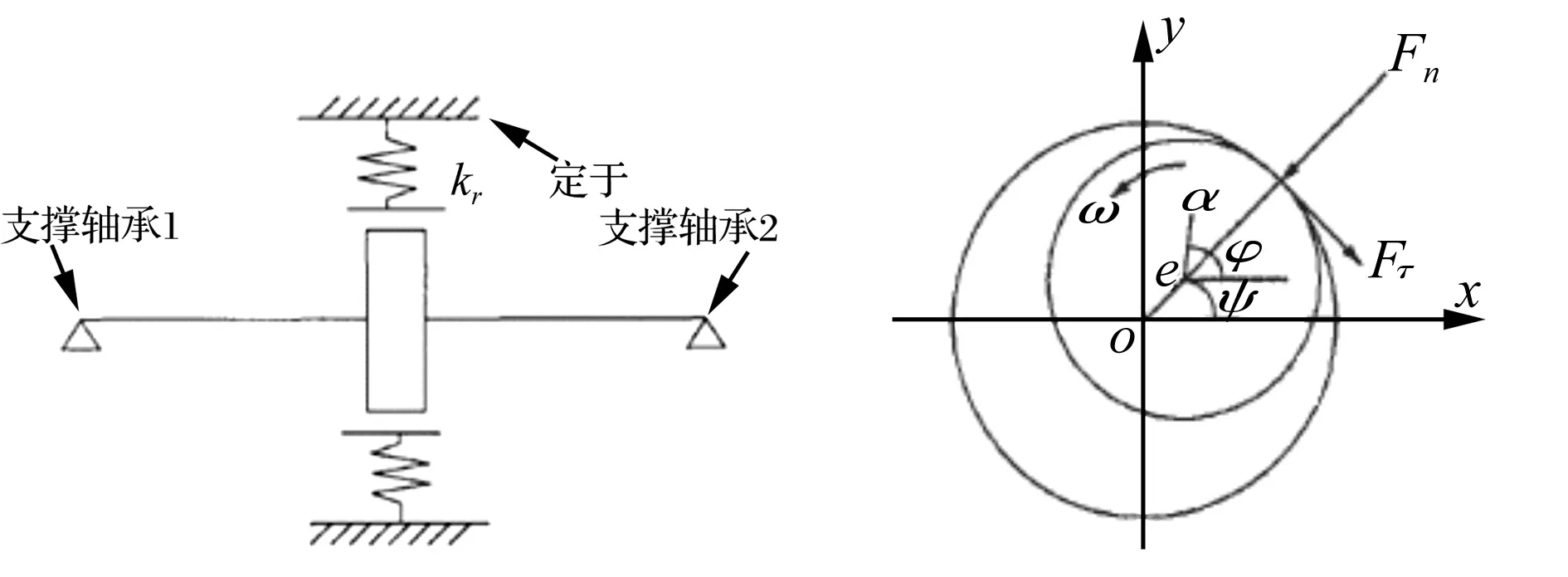
圖1 碰摩轉(zhuǎn)子-軸承系統(tǒng)力學(xué)模型
據(jù)該結(jié)構(gòu)特點,設(shè)轉(zhuǎn)子系統(tǒng),① 不考慮軸的軸向變形,轉(zhuǎn)子單元用Rayleigh梁-軸模型;② 軸承油膜力處理為節(jié)點力,外阻尼力作相同處理。轉(zhuǎn)子有限元模型見圖3。
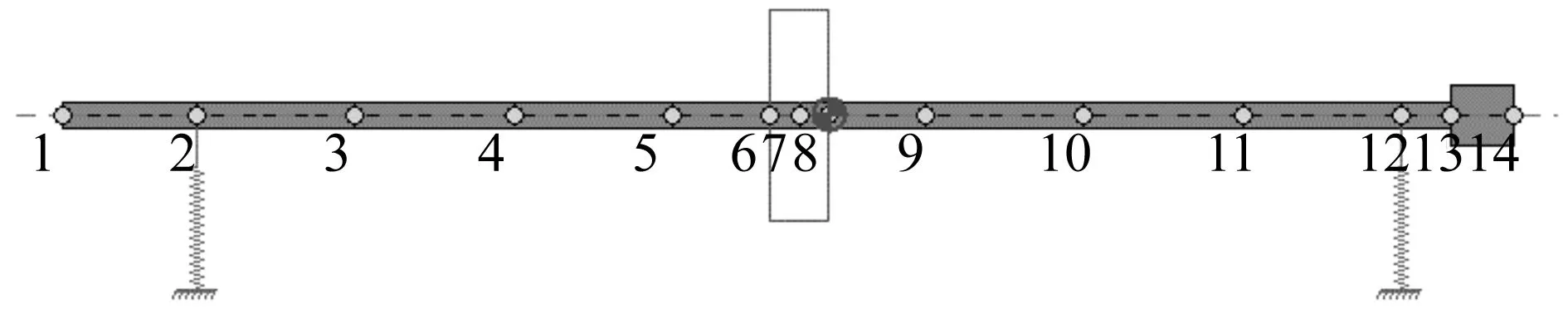
圖3 轉(zhuǎn)子系統(tǒng)有限元模型
包括轉(zhuǎn)子不平衡、碰摩影響的整體系統(tǒng)一般非線性運(yùn)動方程[11-12]為

[G]+[Fu]+[Frub]
(1)
式中:[M],[D],[K]分別為系統(tǒng)質(zhì)量、阻尼、剛度矩陣。阻尼矩陣包括內(nèi)阻尼、軸承阻尼及陀螺力矩。
系統(tǒng)廣義坐標(biāo)(節(jié)點位移矢量)為
{u}={x1y1θx1θy1x2y2θx2θy2…xnynθxnθyn}
(2)
重力矢量為
[G]={0-g0 0,0-g0 0,…,0-g0 0}
(3)
不平衡力矢量、碰摩力矢量為
[Fu]={0 0 0 0,0 0 0 0,…,
meeω2cos(ωt)meeω2cos(ωt) 0 0,…,0 0 0 0}
(4)
[Frub]={0 0 0 0,0 0 0 0,…,
Frub/xFrub/y0 0,…,0 0 0 0}
(5)
據(jù)有限元法(圖4),Rayleigh梁-軸單元廣義坐標(biāo)為兩端節(jié)點位移,則單元廣義坐標(biāo)為
us=[xAyAθxAθyAxByBθxBθyB]
(6)

圖4 轉(zhuǎn)軸離散的Rayleigh梁-軸單元模型
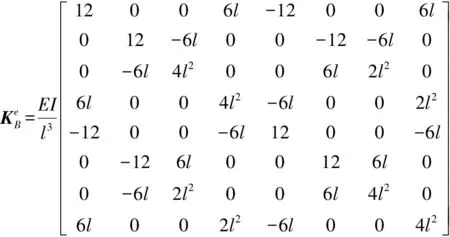
單元質(zhì)量矩陣、剛度矩陣及陀螺力陣[13]為

(7)

(8)
(9)
(10)
式中:m為單元長度質(zhì)量;r為單元半徑;l為單元長度;EI為抗彎剛度。利用G*(4×2n)單元矩陣組裝成系統(tǒng),即
(11)
(12)
(13)
采用比例阻尼,即瑞利阻尼形式建立阻尼矩陣為
[C]=α[M]+β[K]
(14)
式中:
ξ1,ξ2為阻尼系數(shù),據(jù)經(jīng)驗值分別取0.05、0.08;ωn1,ωn2為轉(zhuǎn)子一、二階臨界轉(zhuǎn)速(r/min)。
1.2 滑動軸承有限元動力分析
用有限元求解Reynolds方程計算滑動軸承8個系數(shù)。滑動軸承模型見圖5。對不可壓縮流體,簡化的雷諾方程可表示為
(15)

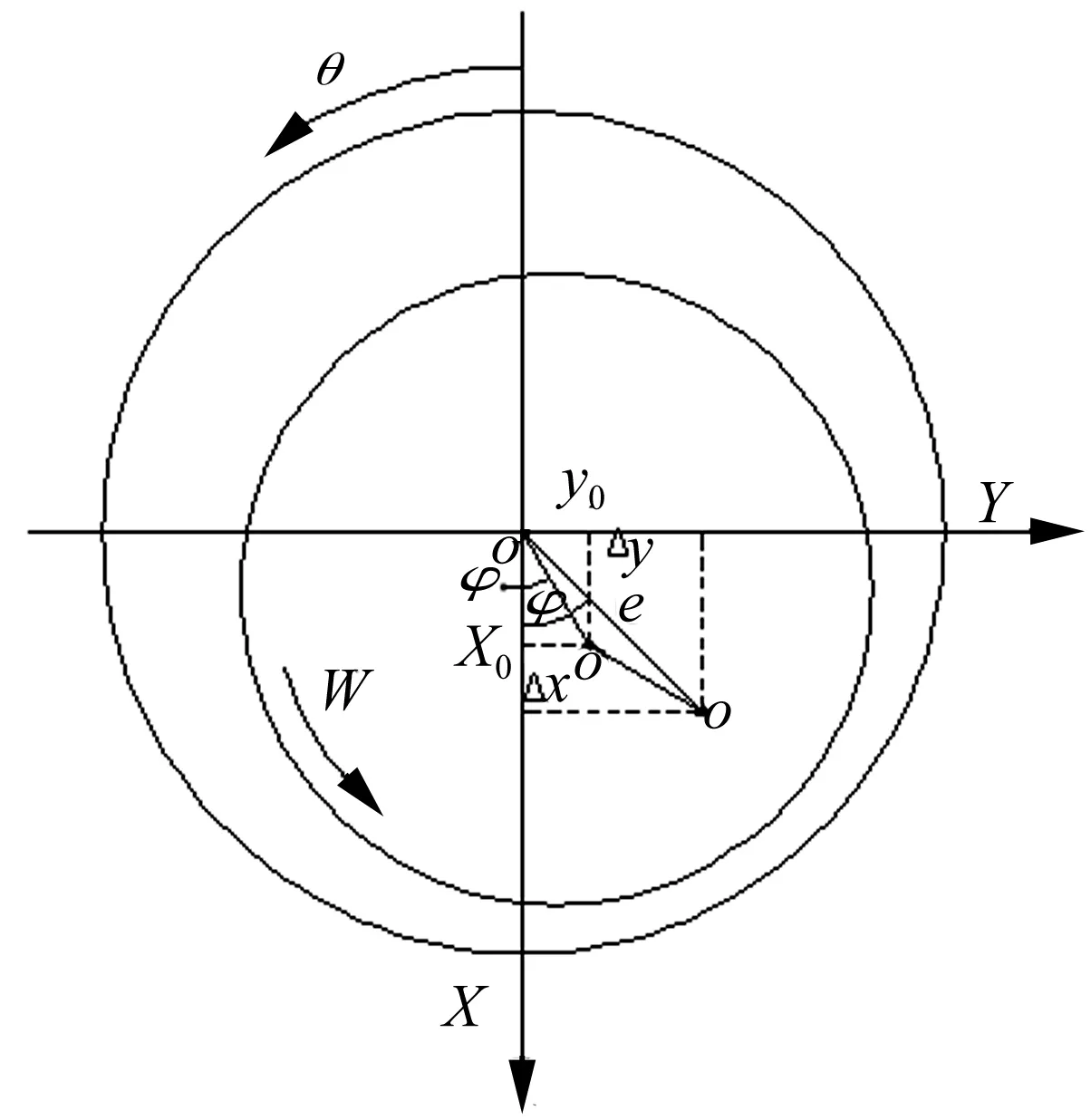
圖5 滑動軸承模型
X,Y方向油膜力為
(16)
據(jù)擾動變量,該軸承動力系數(shù)為
(17)
(18)
由油膜力產(chǎn)生支撐節(jié)點的剛度、阻尼矩陣為
(19)
(20)
1.3 圓周局部碰摩力方程
轉(zhuǎn)子系統(tǒng)中轉(zhuǎn)、靜件碰摩分法向碰撞與切向摩擦兩種行為[14]。非線性有限元中可歸結(jié)為高度非線性接觸問題。本文只考慮彈性圓周局部碰摩情況,即在圓盤整個圓周上均可能發(fā)生局部碰摩。設(shè)靜子徑向變形為線性變形,Kr為靜子徑向剛度,轉(zhuǎn)子與靜子間摩擦符合庫倫摩擦定律,摩擦系數(shù)為f,即摩擦力與作用于接觸面的正壓力成正比,并設(shè)靜止時轉(zhuǎn)子與靜子間間隙為δ0,碰摩力為
(21)
碰摩力發(fā)生時,其正向碰摩力FN與切向碰摩力FT分解在x-y坐標(biāo)系可表示為
(22)
Frub,x=Frub,y=0,(e<δ0)
(23)
1.4 剪切粘滯阻尼器數(shù)學(xué)模型
據(jù)阻尼材料特性設(shè)計新型剪切粘滯阻尼器,結(jié)構(gòu)見圖6,由剪切元件,阻尼介質(zhì)及阻尼器外盒組成。剪切元件通過軸承與旋轉(zhuǎn)軸連接,阻尼器外盒通過螺栓與地基固定,內(nèi)部充滿阻尼液介質(zhì)。此介質(zhì)具有高分子有機(jī)材料的高粘性及無機(jī)材料性能的穩(wěn)定性,為旋轉(zhuǎn)機(jī)械減振阻尼器理想阻尼介質(zhì)。其運(yùn)動粘度可達(dá)到幾十萬厘泊至幾千萬厘泊[15]。該阻尼器的抑振性能受溫度影響小,能在-50℃~350℃環(huán)境或環(huán)境溫度變化較大場合使用。剪切粘滯阻尼器利用其高分子粘性材料的剪切變形耗散能量,抑制轉(zhuǎn)子系統(tǒng)振動。該阻尼無需像擠壓油膜阻尼軸承替代原軸承支撐,安裝方便,不會造成油膜非線性失穩(wěn),無附加控制系統(tǒng)。本文建立該阻尼器動力學(xué)模型對其減振機(jī)理進(jìn)行分析。

圖6 阻尼器結(jié)構(gòu)示意圖
已有諸多研究對傳統(tǒng)剪切型粘滯阻尼器動態(tài)特性建立數(shù)學(xué)模型進(jìn)行探討。其中最好描述該剪切粘滯阻尼器本構(gòu)特性的為Maxwell模型[16]。剪切粘性阻尼器動態(tài)特性主要依據(jù)其阻尼液介質(zhì)及阻尼裝置的幾何結(jié)構(gòu)。在此模型中:
P+λDr[P]=C0Dq[u]
(24)
式中:P為阻尼力;Dr[P]為P的r階導(dǎo)數(shù);λ為松弛時間常數(shù);u為位移;Dq[u]為位移q階導(dǎo)數(shù),q=1時C0為常量阻尼系數(shù),與阻尼裝置結(jié)構(gòu)有關(guān),工程常用計算式為
C0=kμA
(25)
式中:k為試驗修整系數(shù);μ為阻尼動力系數(shù);A為阻尼液與阻尼裝置接觸面積。
參數(shù)r,λ,C0可通過對阻尼器彈性剛度曲線進(jìn)行擬定獲得。阻尼力幅值與位移幅值間關(guān)系傅里葉表示為
(26)
式中:ω為角速度;K1,K2分別為阻尼器存儲剛度及損耗剛度:
(27)
(28)
(29)
該阻尼器模型的阻尼系數(shù)計算式為
(30)
因此,轉(zhuǎn)子系統(tǒng)帶動剪切元件作穩(wěn)態(tài)簡諧運(yùn)動產(chǎn)生的力為
(31)
或
(32)
基于以上對阻尼器特性分析,將剪切粘滯阻尼器作用于碰摩轉(zhuǎn)子-滑動軸承系統(tǒng)建立碰摩轉(zhuǎn)子-滑動軸承-阻尼系統(tǒng)減振機(jī)理分析。整系統(tǒng)運(yùn)動方程為

[G]+[Fu]+[Frub]
(33)
2 剪切粘滯阻尼器抑制轉(zhuǎn)子碰摩數(shù)值仿真分析
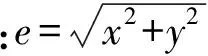
仿真轉(zhuǎn)子系統(tǒng)具體結(jié)構(gòu)參數(shù)及數(shù)值見表1。
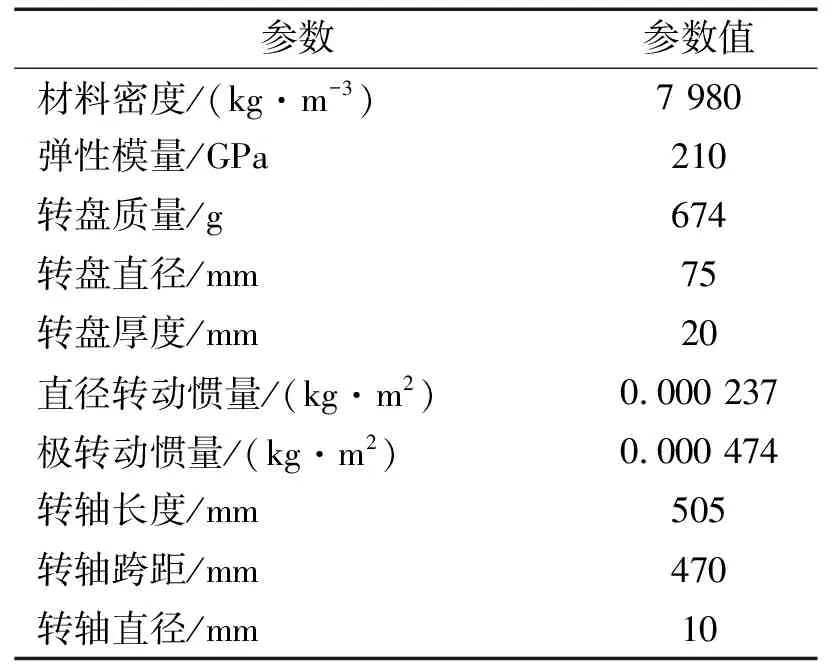
表1 仿真轉(zhuǎn)子基本結(jié)構(gòu)參數(shù)
圖7 滑動軸承剛度與阻尼動力系數(shù)
用有限元法將軸劃分為13個軸段單元(圖3),計14節(jié)點,其中第7節(jié)點代表轉(zhuǎn)盤中心,第2、12節(jié)點分別為軸承支撐。先對圓柱瓦軸承建模,軸承直徑10 mm,軸瓦有限長度7 mm,半徑間隙0.05 mm,滑動軸承剛度及阻尼動力特性隨轉(zhuǎn)速關(guān)系見圖7,圖中,剛度系數(shù)單位N·mm,阻尼系數(shù)單位N·s/mm。
計算獲得前兩階臨界轉(zhuǎn)速分別為2801 r/min,30126 r/min。以轉(zhuǎn)速2000 r/min為例研究新型剪切粘滯阻尼器對轉(zhuǎn)子系統(tǒng)碰摩振動的抑制效果。仿真參數(shù)為,在0°初相位處施加0.15 kg·mm不平衡量,并設(shè)只在圓盤中心處存在不平衡;碰摩間隙28 μm; 碰摩剛度5×104N/m,碰摩系數(shù)0.3,并設(shè)轉(zhuǎn)靜件間碰摩僅發(fā)生在轉(zhuǎn)盤處;在第10節(jié)點處加阻尼器(圖3),取C0=1.5 N·s/mm。采用四階Runge-Kutta數(shù)值方法求解非線性方程組,選關(guān)鍵點3及7轉(zhuǎn)盤中心處橫向振動幅值譜與軸心軌跡為研究對象,仿真結(jié)果見圖8、圖9,圖中軸心軌跡均由0.1 s內(nèi)數(shù)據(jù)組成;1X表示1倍頻幅值,2X表示2倍頻幅值,幅值譜單位:mm。
由于仿真中所設(shè)碰摩參數(shù)屬嚴(yán)重碰摩現(xiàn)象,且模擬整周局部碰摩故障,碰摩對轉(zhuǎn)子系統(tǒng)動態(tài)響應(yīng)較大,在幅值譜圖上表現(xiàn)為高頻成分并增長顯著,出現(xiàn)2倍工頻成分振動幅值;在軸心軌跡圖上表現(xiàn)為碰摩后軸心軌跡嚴(yán)重扭曲變形,呈不規(guī)則紊亂現(xiàn)象。圖8、 圖9分別為轉(zhuǎn)速n=2 000 r/min時施加外阻尼前后關(guān)鍵點頻譜圖及軸心軌跡圖。仿真參數(shù)下由圖8可知,轉(zhuǎn)盤處碰摩使整個轉(zhuǎn)子系統(tǒng)發(fā)生嚴(yán)重碰摩振動。比較圖8(a)與圖8(c)看出,碰摩處2倍頻幅值最大;比較圖8(a)、圖9(a)及圖8(c)、圖9(c),關(guān)鍵點3節(jié)點與7節(jié)點X,Y方向幅值譜中2倍頻成分在施加新型剪切粘滯阻尼器后消失,而工頻成分振動幅值均大幅下降;比較圖圖8(b)、圖9(b)及圖8(d)、圖9(d),軸心軌跡因碰摩引起的嚴(yán)重混亂變?yōu)榉€(wěn)定規(guī)則似橢圓形;因此,數(shù)值仿真結(jié)果表明該新型剪切粘滯阻尼器能有效抑制碰摩現(xiàn)象。

圖8 2 000 r/min無阻尼碰摩幅值譜與軸心軌跡圖
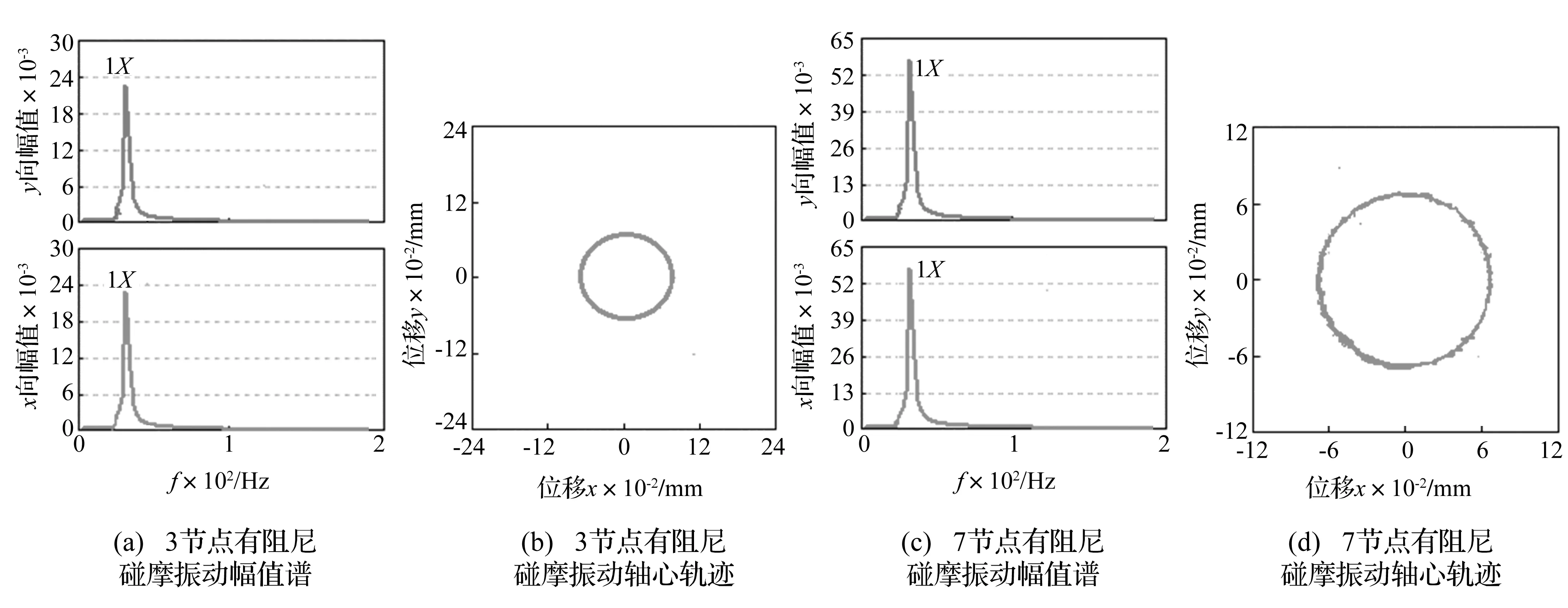
圖9 2 000 r/min有阻尼碰摩幅值譜與軸心軌跡圖
3 實驗研究
為進(jìn)一步驗證結(jié)果的正確性,設(shè)計整周局部碰摩剪切粘滯阻尼減振實驗裝置見圖10,其參數(shù)與仿真計算參數(shù)基本一致。圖11為實驗平臺,由于實驗條件限制,本實驗設(shè)計的模擬碰摩為靜子與轉(zhuǎn)軸間碰摩。

圖10 碰摩實驗裝置結(jié)構(gòu)
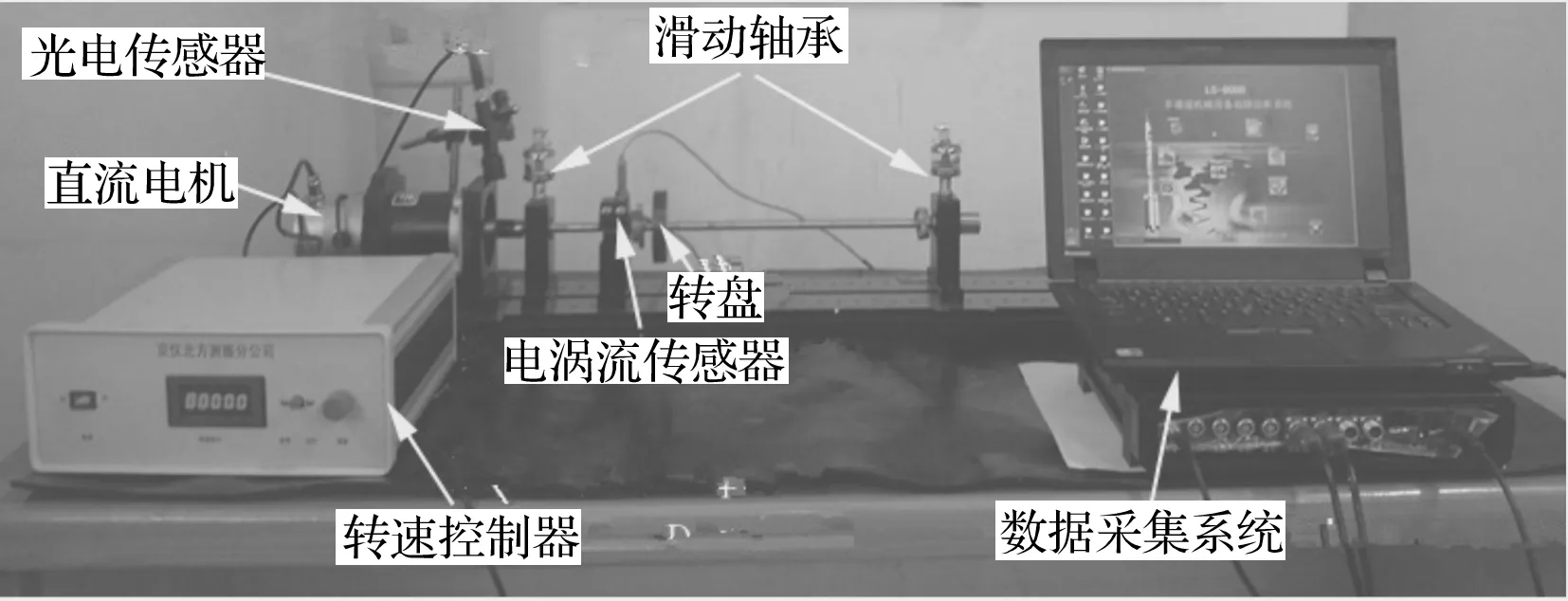
圖11 實驗平臺
試驗中只研究轉(zhuǎn)速2 000 r/min下距左軸承較近測點水平X向及垂直Y向結(jié)果見圖12。試驗轉(zhuǎn)速2 000 r/min下,在轉(zhuǎn)盤處施加不平衡量使碰摩處振動位移達(dá)設(shè)計初始動靜間隙0.5 mm,并比較安裝碰摩裝置及同時安裝碰摩裝置與阻尼減振裝置兩種情況下轉(zhuǎn)子頻域及軸心軌跡變化情況,分析該剪切粘滯阻尼器對轉(zhuǎn)子碰摩在線抑振作用。用測溫儀測量轉(zhuǎn)子振動傳遞到阻尼液后引起阻尼液內(nèi)部溫度變化。發(fā)生碰摩現(xiàn)象時測點頻譜見圖12(a)、(b),軸心軌跡見圖12(c)。由圖12看出,X、Y方向振動峰-峰值分別達(dá)493.2 μm及499.1 μm。頻譜圖出現(xiàn)2倍頻等高階分量,軸心軌跡亦非標(biāo)準(zhǔn)橢圓,而變?yōu)樾男危哂信瞿收咸卣鳌?/p>

圖12 無阻尼裝置轉(zhuǎn)子頻譜圖及軸心軌跡圖

圖13 有阻尼裝置轉(zhuǎn)子頻譜圖及軸心軌跡圖
轉(zhuǎn)子發(fā)生碰摩、安裝剪切粘滯阻尼器后測點X、Y方向頻譜及軸心軌跡見圖13。由圖13看出,X、Y向振動峰-峰值分別達(dá)225.7 μm,163.8 μm,頻譜主要為1倍頻,其它高階倍頻成分基本消除,軸心軌跡也有變化,與無阻尼裝置實驗條件數(shù)據(jù)相比,X、Y向振動峰-峰值分別下降51.7%,67.2%。與仿真計算結(jié)果趨勢一致。由此表明該剪切粘滯阻尼器能較好抑制碰摩振動、消除碰摩故障。實驗中觀測到阻尼液溫度變化室溫25℃~25.2℃,由轉(zhuǎn)子振動能量傳遞給阻尼液引起的溫度變化范圍較小,說明此阻尼器工作性能穩(wěn)定。由于實驗條件限制,碰摩較大,轉(zhuǎn)子與試驗臺基礎(chǔ)振動過于劇烈,導(dǎo)致傳感器測量不穩(wěn)定,無法驗證阻尼器對轉(zhuǎn)子過臨界后的減振效果,尚待研究。
4 結(jié) 論
(1) 本文通過分析新型剪切粘滯阻尼器對支撐在滑動油膜軸承上單盤碰摩轉(zhuǎn)子系統(tǒng)的抑振作用,建立包括非線性碰摩力、線性油膜力、外加剪切阻尼力的振動系統(tǒng)數(shù)學(xué)模型,并采用四階Runge-Kutta方法進(jìn)行數(shù)值求解,對比分析碰摩轉(zhuǎn)子在施加新型剪切粘滯阻尼器后的振動響應(yīng)。
(2) 通過設(shè)計的相關(guān)實驗驗證,該阻尼器能有效控制碰摩轉(zhuǎn)子系統(tǒng)碰摩振動,不僅能減少工頻振動,且能消除碰摩引起的高頻振動成分,對實際工程具有較高指導(dǎo)價值。
[1] Muszynska A.Rub-an important malfunction in rotating machinery. Proc of Senior Mech. Engry Sem[C]. Bently Nevada Corp. Carson City, NV,1983.
[2] Sun Zheng-ce,Xu Jian-xue,Zhou Tong. Analysis on complicated characteristics of a high-speed rotor system with rub-impact [J]. Mechanism and Machine Theory,2002,37(7):659-672.
[3] 張善鵬,周廣順.汽輪發(fā)動機(jī)組轉(zhuǎn)子碰摩振動的理論分析及實例[J].動力工程,2003,23(6):2850-2853.
ZHANG Shan-peng, ZHOU Guang-shun. Theoretical analysis of steam turbo-generator rub vibration and examples[J]. Power Engineering, 2003,23(6):2850-2853.
[4] Dai X,Jin Z, Zhang X. Dynamic behavior of the full rotor/stop rubbing: numerical simulation and experimental verification [J]. Journal of Sound and Vibration, 2002,251(5):807-822.
[5] Karpenko E V, Wiercigroch M, Pavlovskaia E E. Bifurcation analysis of a preloaded jeffcott rotor[J]. Chaos, Solitons & Fractals, 2003, 15(2): 407-416.
[6] Pavlovskaia E E, Karpenko E V, Wiercigroch M. Nonlinear dynamic interactions of a jeffcott rotor with preloaded snubber ring[J]. Journal of Sound and Vibration,2004, 276(1/2): 361-379.
[7] Karpenko E V, Wiercigroch M, Pavlovskaia E E, et al. Experimental verification of Jeffcott rotor model with preloaded snubber ring[J]. Journal of Sound and Vibration, 2006, 298(4/5): 907-917.
[8] Ishida Y. Recent developments on the passive vibration control method[C]. In: Proc. The 8th IFToMM International Conference on Rotor Dynamics, KIST, Seoul, Korea, 2010.
[9] Ginzinger L, Ulbrich H. Control of a rubbing rotor using an active auxiliary bearing[J]. Journal of Mechanical Science and Technology, 2007, 21(6): 851-854.
[10] Keogh P S, Sahinkaya M N, Burrows C R, et al. Rotor/ auxiliary bearing dynamic contact modes in magnetic bearing systems[C]. In: Proceedings of the 11th International symposium, Magnetic Bearings, Nara, Japan, 2008.
[11] Sun G Y. Rotor drop and following thermal growth simulations using detailed auxiliary bearing and damper models[J].Journal of Sound and Vibration, 2006, 289(1/2): 334-359.
[12] 韓清凱,于濤,王德文,等.故障轉(zhuǎn)子系統(tǒng)的非線性振動分析與診斷方法[M].北京:科學(xué)出版社,2010:40-42.
[13] Han Qing-kai,Zhang Zhi-wei, Liu Chang-li,et al.Periodic motion stability of a dual-disk rotor system with rub-impact at fixed limiter[J]. Vibro-Impact Dynamics of Ocean Systems and Related Problems Lecture Notes in Applied and Computational Mechanics,2009,44:105-119.
[14] Jiang Jun. The analytical solution and the existence condition of dry friction backward whirl in rotor-to-stator contact system[J]. ASME Journal of Vibration and Acoustics,2007, 129(2): 260-264.
[15] 張光橋. 橋梁斜拉索-高分子材料阻尼被動耗能體系[D]. 哈爾濱:哈爾濱工業(yè)大學(xué),2011.
[16] Makris1 N, Constantinou M C. Fractional-derivative maxwell model for viscous dampers[J]. Journal of Structural Engineering, 1991,117(9):2708-2724.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40