隨機激勵下重載車輛空氣懸架參數多目標優化
2014-09-05 08:40:10龐輝,彭威,原園
振動與沖擊 2014年6期
龐 輝, 彭 威, 原 園
(西安理工大學 機械與精密儀器工程學院,西安 710048)
隨著高速公路快速發展及對運輸效率要求提高,載重汽車使用愈加廣泛。在保證汽車動力性與操縱穩定性前提下,對路面的破壞已成重型載貨汽車的主要問題。由于路面激勵引起車輛垂向振動,導致車輛行駛平順性變差,對路面產生較強沖擊破壞力。空氣懸架可根據車輛質量及路面狀況自適應調整空氣彈簧剛度及阻尼系數,使車輛平順性達到最優,改善駕駛員的舒適性,且可減輕車輛零部件的損壞程度,提高車輛使用壽命[1]。
目前,遺傳算法(Genetic Algorithm,GA)廣泛用于求解多模式優化問題全局解,如車輛主動/半主動懸架優化問題[2-5],GA算法亦用于求解控制器增益及優化控制問題[5-6]。為提高車輛行駛平順性,重載車輛常用空氣懸架系統,其空氣彈簧剛度、阻尼小于輪胎剛度及阻尼(指兩者剛度不在同一數量級),且輪胎與空氣彈簧剛度、阻尼具有一定非線性,使車輛空氣懸架系統亦有較強非線性特征。若能對輪胎與空氣彈簧剛度、阻尼參數進行優化與匹配,則可提高整車性能。對載重車輛懸架參數優化已有大量研究[2-9],但優化設計方法、思路與實際工程應用仍有差距。如已有優化方法存在:①目標優化函數較少,只考慮某一種路面的優化;②多個子目標函數的權重系統分配較隨意,會導致優化目標函數局部過早收斂,多采用各目標加權合成一個適應度進行優化策略。
本文以某載貨汽車空氣懸架為研究對象,從提高車輛行駛舒適性、減小輪胎對路面動載荷目的出發,構建該車1/2車輛模型的多目標優化模型,采用一般遺傳優化算法及改進的多目標自適應優化算法對車輛空氣懸架參數進行優化,并將兩種優化結果對比分析。
1 隨機路面模型
路面不平度指道路表面偏離理想平面,影響車輛動力性、行駛質量、路面動載荷三者數值特征,通常用功率譜密度描述路面統計特征[10-12],據功率譜密度,路面分8級。
路面不平度統計特征可用路面速度功率譜密度描述為:
(1)
其中:n0=0.1 m-1為參考空間頻率;Gq(n0)為參考空間頻率n0下路面功率譜密度值,稱路面不平度系數,單位m3。

(2)
由式(2)知,路面速度功率譜密度幅值在整個頻率范圍內為一常數,即 “白噪聲”,其幅值大小僅與路面不平度系數Gq(n0)及車速u有關。對平穩隨機路面激勵,其路面模型為高斯隨機過程。由此,可得路面仿真計算的一般公式為:

式中:w(t)為matlab白噪聲;x(t)為路面隨機位移激勵;n為所選路面空間頻率,A級路面n=0.14,B級路面n=0.13,C級路面n=0.12。
基于matlab/simulink環境建立的車輛前輪路面仿真模型見圖1,其輸出作為求解1/2車輛模型的輸入信號。需要說明的是,后輪路面相對前輪輸入信號有一定時間延遲t1,t1=(a+b)/u。
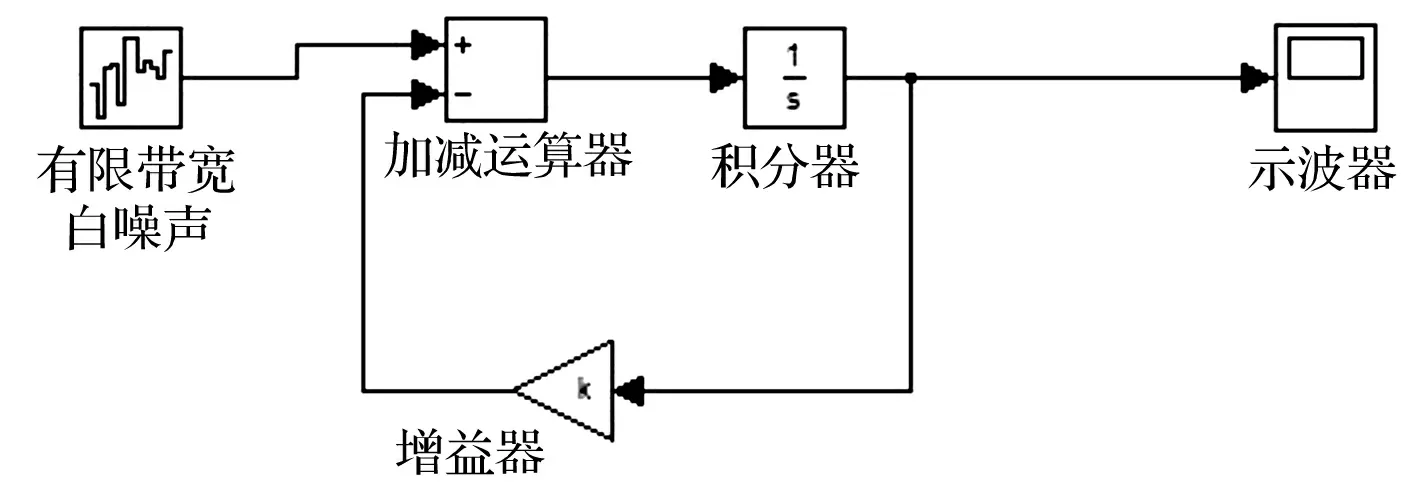
圖1 前輪路面隨機仿真模型
2 1/2車輛模型
某載貨汽車簡化力學模型見圖2,其中Z2為車身垂向位移;θ為車身俯仰角;Z1f,Z1r為前、后輪垂向位移,為該1/2車輛模型的4個自由度;Z0f,Z0r為前、后輪路面不平度輸入信號,由圖1獲得。車輛及空氣懸架參數見表1。
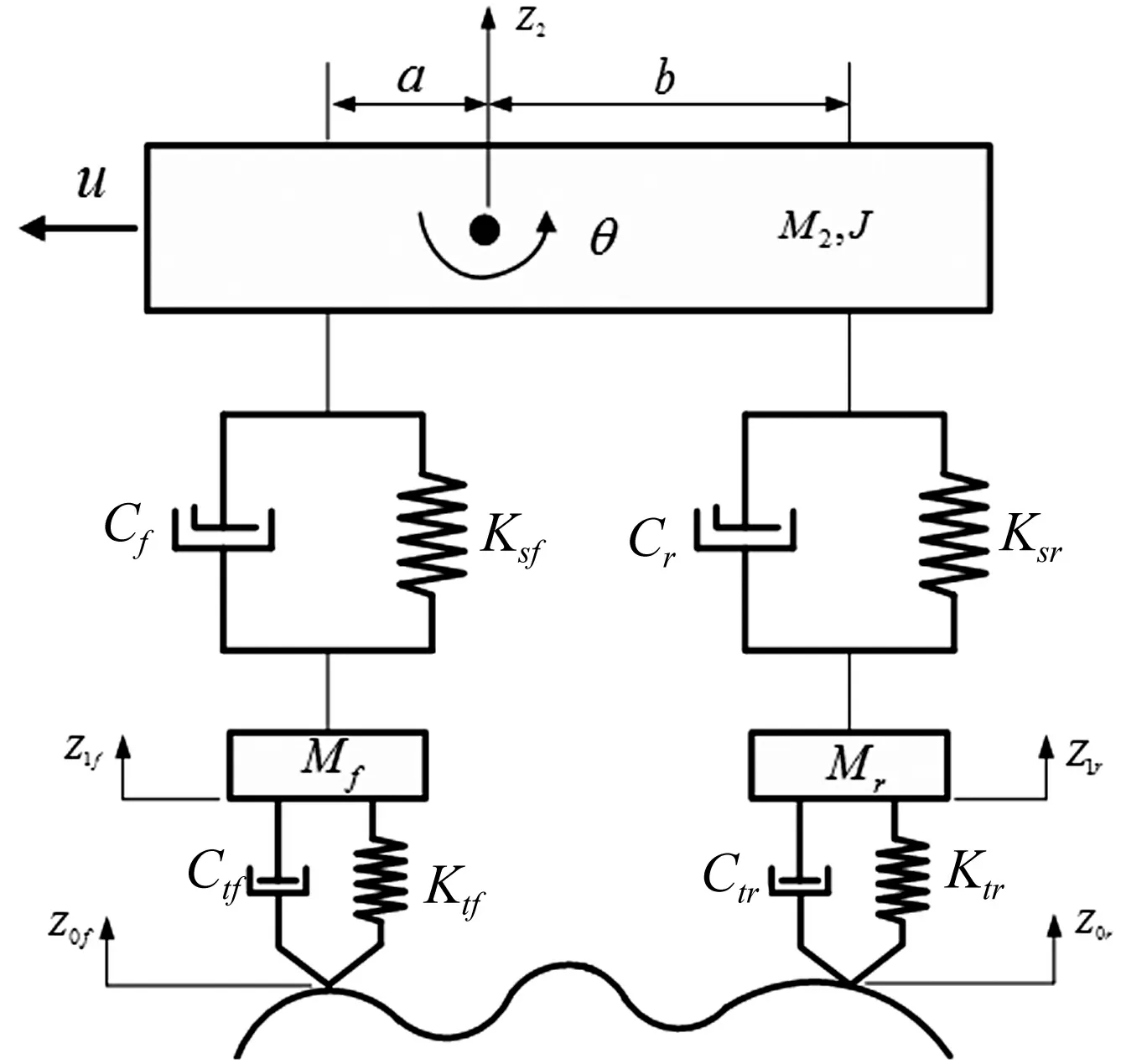
圖2 車輛四自由度振動模型
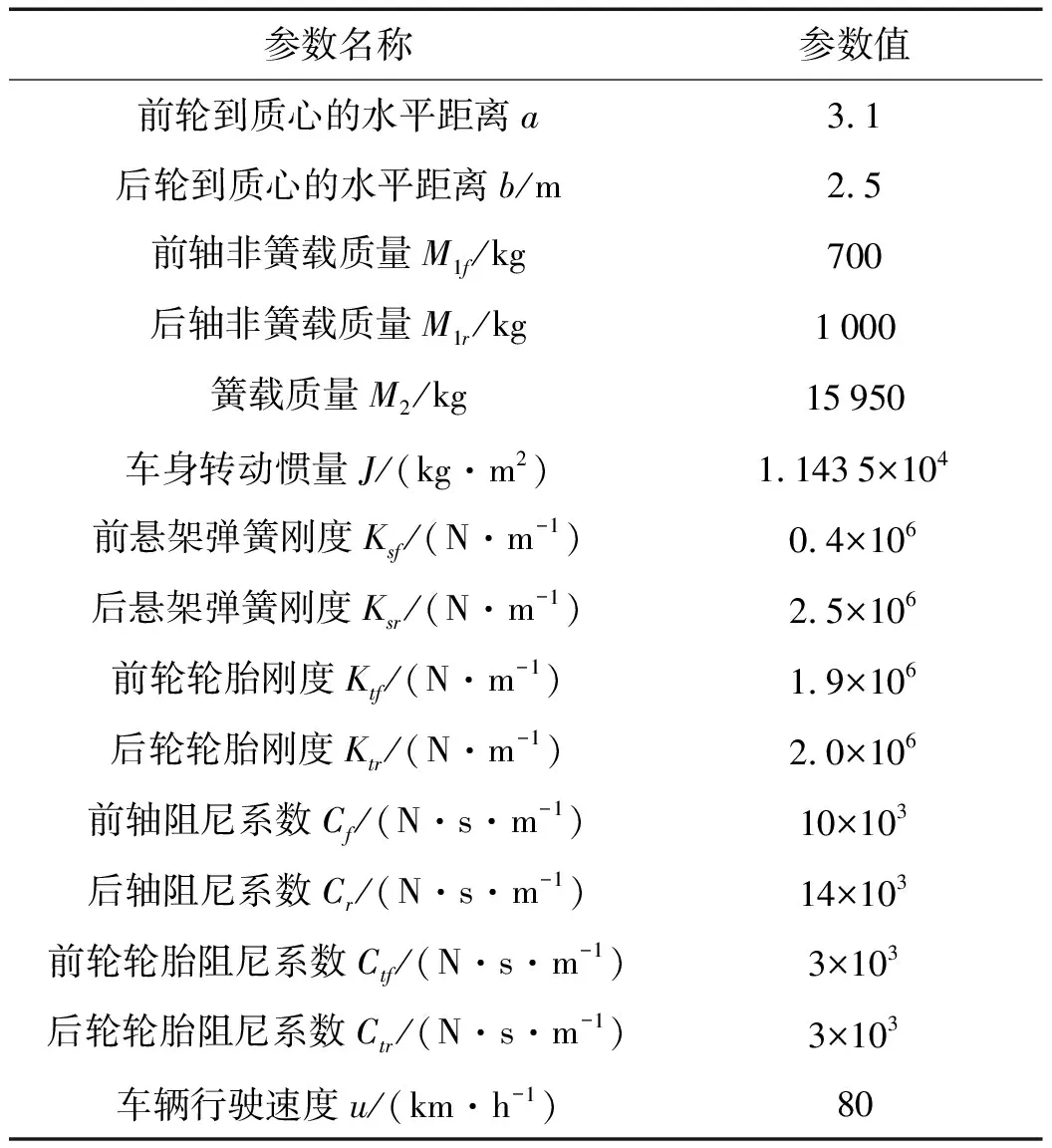
表1 車輛參數
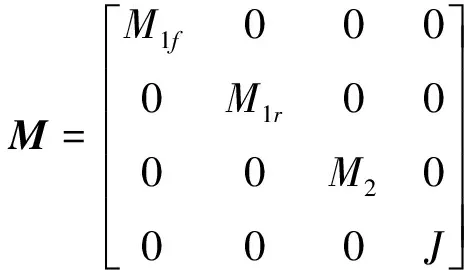
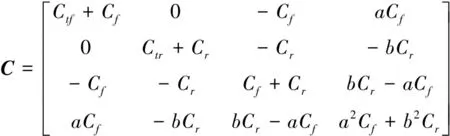
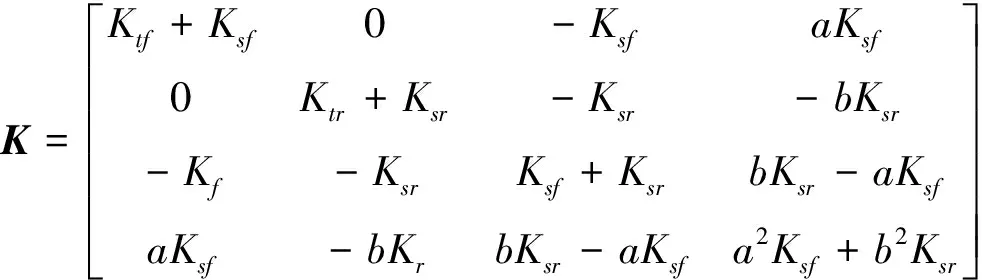
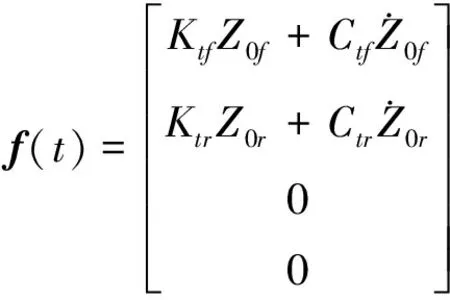
車輛行駛中前后輪輸入為平穩隨機路面激勵,且作用于前后輪兩處。據圖2的1/2車輛模型懸架系統動力學模型建立動力學方程為:

(3)
其中:

前、后輪胎對路面的瞬時動載荷分別為:
(4)
(5)
前、后輪胎對路面的動載荷均方根值為:
(6)
(7)
車身垂直加速度均方根值為:
(8)
式中:N為采樣點總數。
3 懸架參數多目標優化
3.1 目標函數
為提高汽車行駛平順性、減少輪胎對路面的破壞,以車身垂向加速度均方根值a(X)為汽車平順性評價指標,以前、后輪對路面的動載荷均方根值f1(X),f2(X)為動載荷對路面破壞程度評價指標。為控制隨機因素所致性能波動,以a(X),f1(X),f2(X)三目標函數的統計方差為目標函數,對載荷汽車在A、B、C級路面上的行駛穩定性進行優化,均值目標函數、方差目標函數各9個,共18個,見表2。
3.2 設計變量
設計變量取:X=[x1x2x3x4]T=[KsfKsrCfCr]T,結合實際情況與經驗取值范圍見表3。
3.3 約束條件
為保證貨車行駛中車輛、貨物的安全性,懸架動撓度所受碰撞器限制在安全范圍內,即:
g1(X)=Z2-Z1f+6σ(z2-z1f)≤Dmax
(9)
g2(X)=Z2-Z1r+6σ(z2-z1f)≤Dmax
(10)
式中:Dmax為允許最大動撓度,據陜汽奧龍4×2牽引車懸架限位行程取80 mm。
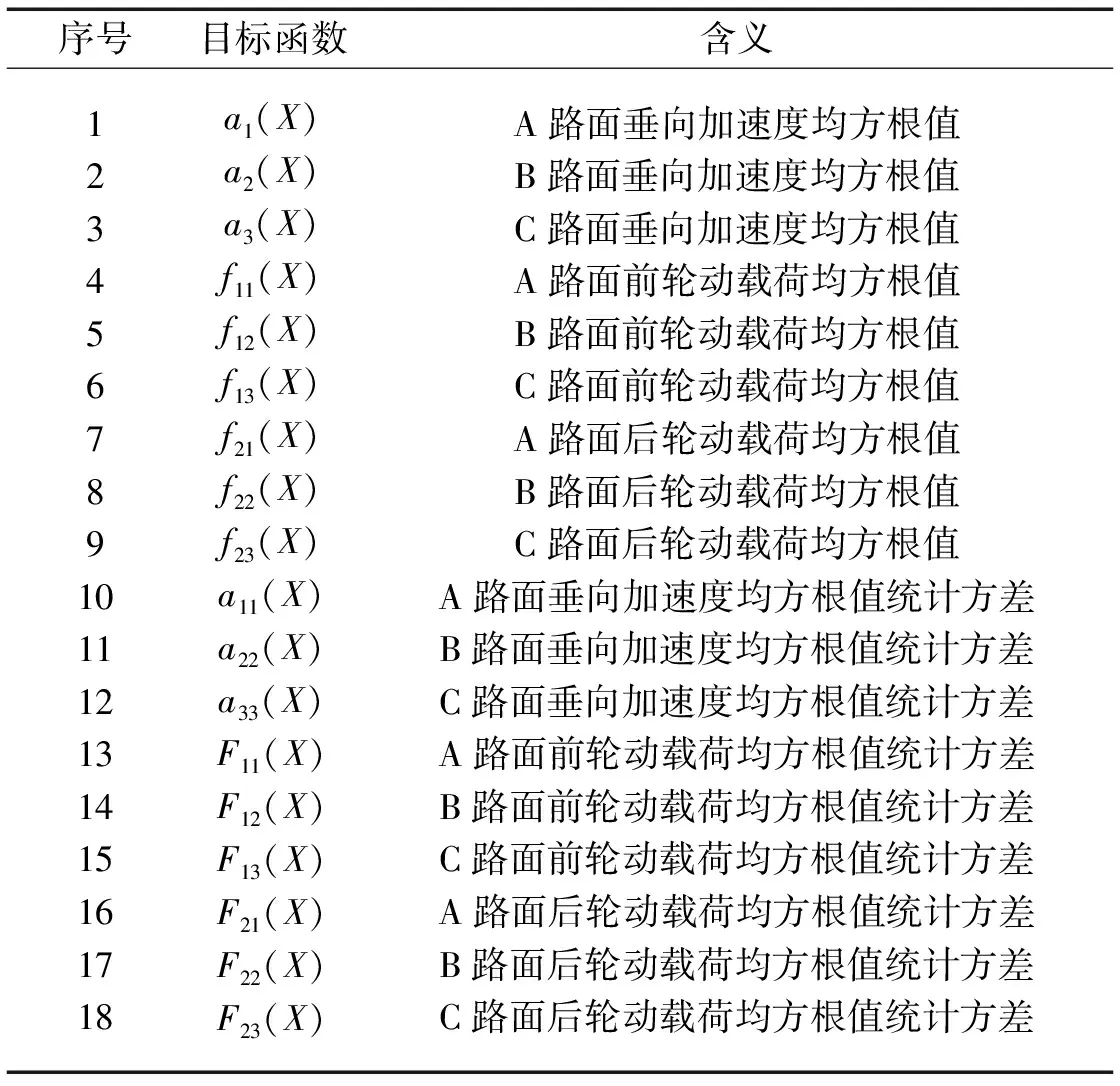
表2 懸架參數優化的目標函數
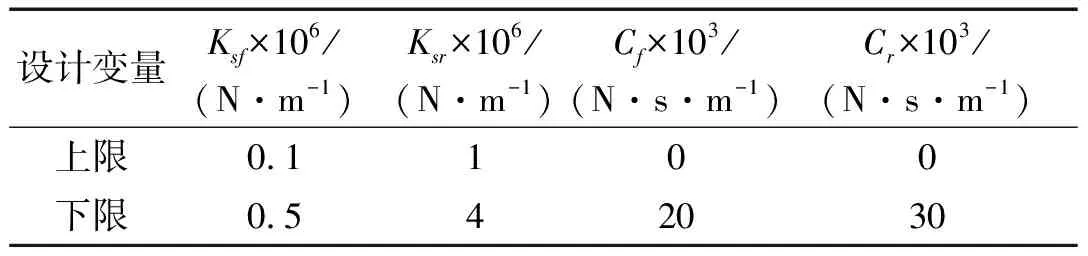
表3 設計變量的范圍
3.4 優化過程及結果
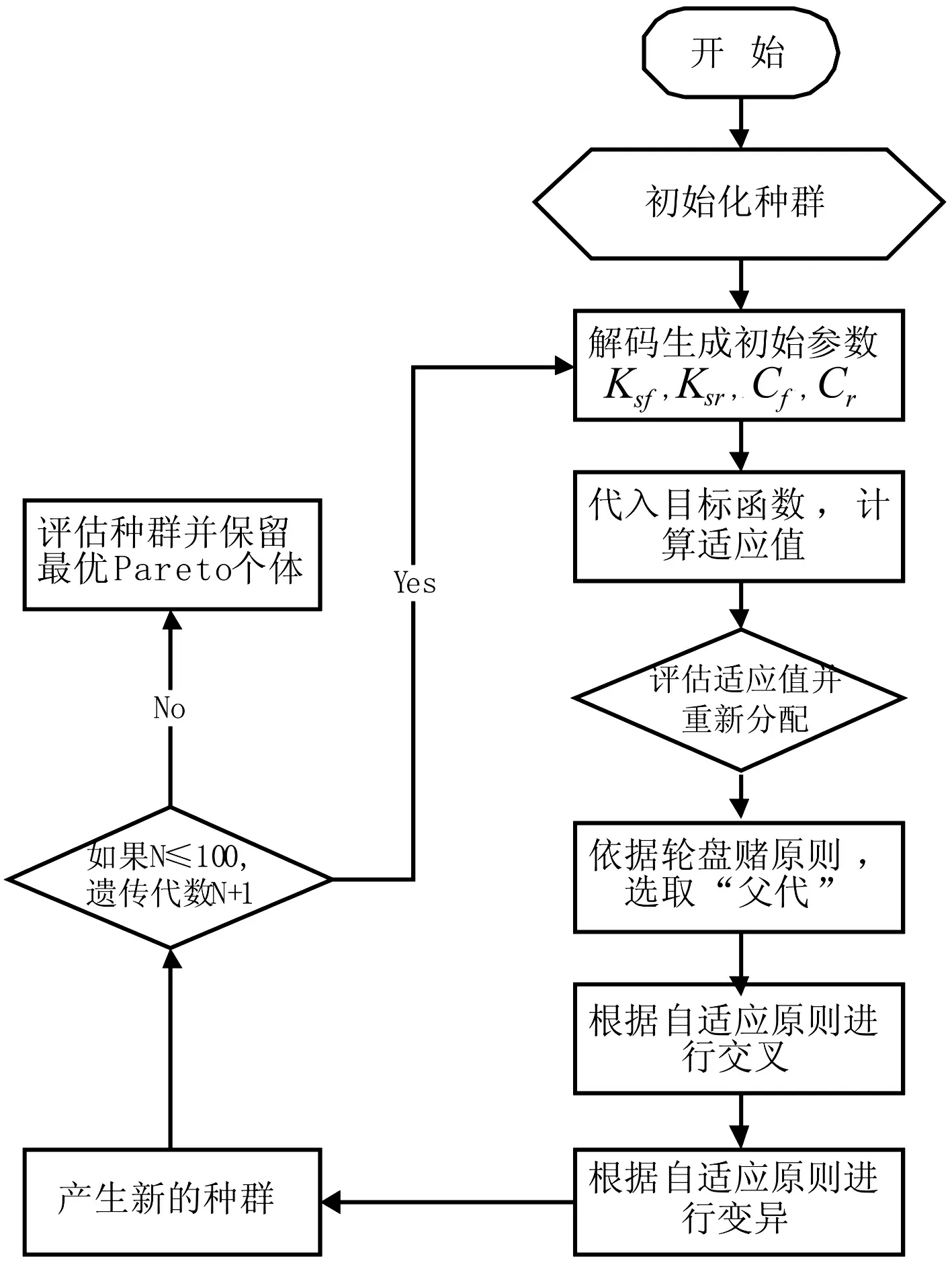
圖3 自適應遺傳算法計算流程圖
遺傳算法模擬達爾文生物進化論的自然選擇與遺傳學機理的生物進化過程計算模型,為模擬自然進化過程搜索最優解方法。通過搜尋一個或多個目標函數最小(最大)值,創建個體種群模擬自然選擇(本文為半主動車輛懸架控制輸入),選父代產生子代,且勝任的個體存活(勝任個體作為下一代優化使用)。遺傳算法主要特點為全局搜索能力強、不易陷入局部最優,尤其適用于復雜、非線性問題[14]。但傳統的遺傳算法在處理多目標優化問題時,往往對多個目標函數作加權線性組合,將多目標轉換為單目標處理。其存在兩明顯缺點:① 目標權系數分配存較大主觀性;② 在計算過程中易陷入局部極小點導致過早收斂,無法找到理想值。對此,本文采用改進的自適應遺傳優化算法,計算流程見圖3。改進有:
(1) 隨機初始化種群。即據隨機參數約束限制初始化種群,保證參數選擇的真實性。
(2) 適應度計算。即采用適應值重新分配,優化過程中適應度據目標函數值計算,滿足約束條件個體代入目標函數,目標函數值即為適應度,否則適應度為零;不滿足條件個體以絕對概率淘汰,避免權重取1/18的主觀性及優化目標函數值過早陷入局部極小點導致過早收斂。
(3) 選擇。即據輪盤賭策略累加適應值,選擇交叉父代,隨機選擇母代。
(4) 交叉、變異。交叉為單點交叉,種群交叉、變異概率值并非始終不變,據適應值變化而變化,交叉變異概率Pc,Pm確定算式為:
(11)
式中:k1,k2,k3,k4為給定合適值,據此可避免一般遺傳算法局部尋優缺點,使所求值無限逼近理想值,更好達到尋優目的。本文取k1=0.5,k2=0.9,k3=0.02,k4=0.05,f,f′為適應值;favg為平均適應值。
經優化計算,得懸架參數優化結果見表4。由表4中看出,優化后后輪剛度值有所增加,阻尼值有所減小。

表4 優化前后懸架參數對比
采用一般優化與改進多目標自適應優化方法計算所得目標函數統計均值結果對比見表5。

表5 一般優化與多目標自適應優化目標函數統計均值對比

表6 一般優化與多目標自適應優化目標函數統計方差對比
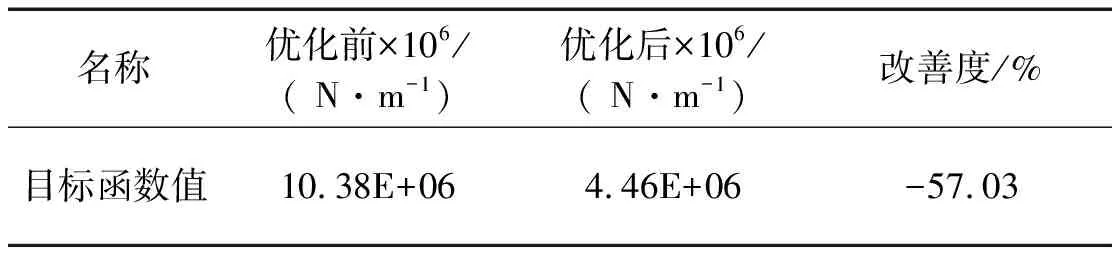
表7 常規GA與MOGA優化目標函數值對比
對比分析表5~表7中優化計算結果不難看出,相比一般遺傳算法:① 利用本文所提算法計算所得車身垂向加速度、前后輪動載荷有效值約減小10%;② 經多目標自適應遺傳優化算法優化后所得垂向加速度、前后輪動載荷有效值方差約降低50%,改善幅度較大;③ 對比表7優化前后目標函數值知,優化后目標函數值改善度降低57.03%,證明了本文算法的有效性,達到多目標優化目的。
為將算法收斂與計算量對比分析,傳統GA算法優化過程為:初始化種群→解碼→計算適應值→交叉和變異→得出最優結果;本文的改進MOGA算法增加了適應值重新分配原則、輪盤賭策略、自適應交叉及變異等環節(圖3)。計算用時上,傳統遺傳算法需3天,MOGA算法則需4天。算法收斂上,初始化種群50、迭代次數100時,MOGA遺傳算法結果基本穩定,而傳統遺傳算法計算結果變動較大,出現局部最優解情況。
為直觀對比一般遺傳優化與改進多目標自適應遺傳優化計算結果,A級路面激勵下優化前后垂向加速度、前后輪動載荷結果見圖4~圖6,限于篇幅,略去B級、C級路面計算曲線對比圖。

圖4 A級路面垂向加速度對比曲線
4 結 論
本文建立的重載車輛空氣懸架參數多目標優化模型,采用一般遺傳算法與改進的多目標自適應遺傳優化算法對該懸架進行優化計算,結論如下:
(1) 建立的4自由度1/2車輛空氣懸架多目標優化模型,采用統一目標函數法對車輛懸架參數進行多目標優化,不僅可提高車輛行駛舒適性,且可減小重載車輛對路面的動載荷,減輕路面損傷。
(2) 較一般遺傳優化算法,采用改進的多目標自適應遺傳算法計算所得垂向加速度,前、后輪動載荷改善幅度大,懸架參數變化小。
(3) 本文所用方法與優化算法對其它類型車輛懸架參數優化計算亦具參考價值。
參 考 文 獻
[1]Bhandari V, Subramanian S C. Development of an electronically controlled pneumatic suspension for commercial vehicles[C]. International Conference on Power, Control and Embedded Systems (ICPCES), Allahabad, India,2010.
[2]TANG Chuan-yin, GUO Li-xin. Research on suspension system based on genetic algorithm and neural network control[J]. Journal of The Open Mechanical Engineering, 2009,3:72-79.
[3]Crews J H,Mattson M G, Buckner G D. Multi-objective control optimization for semi-active vehicle suspensions[J].Journal of Sound and Vibration, 2011, 330:5502-5516.
[4]李海林,王 鐵,申晉憲,等. 被動空氣懸架導向機構仿真與優化[J]. 機械傳動, 2012,36(2):50-56.
LI Hai-lin,WANG Tie,SHEN Jin-xian,et al.Simulation and optimization of guide mechanism of air suspension[J]. Journal of Mechanical Transmission,2012,36(2):50-56.
[5]吳曉君,鄭 超,路 超,等.基于遺傳算法和ADAMS的麥弗遜懸架優化研究[J].工程設計學報,2012,19(4):274-277,282.
WU Xiao-jun,ZHENG Chao,LU Chao,et al. The research on optimization of macpherson suspension based on genetic algorithm and ADAMS[J]. Journal of Engineering Design, 2012,19(4):274-277,282.
[6]Michalewicz Z,Janiko C,Krawczjk J. A modified genetic algorithm for optimal control problems[J]. Computers and Mathematics with Applications, 1992,23(2):83-94.
[7]龐 輝,方宗德,李紅艷,等.某載重卡車懸架參數優化及試驗研究[J].振動與沖擊,2012,31(8):92-95,106.
PANG Hui, FANG Zong-de, LI Hong-yan, et al. Optimization of suspension parameters and test research on a heavy-duty truck[J]. Journal of Vibration and Shock, 2012,31(8):92-95,106.
[8]徐道臨,張 林,周加喜. 重型礦用自卸車油氣懸架參數優化[J].振動與沖擊,2012,31(24):98-101,107.
XU Dao-lin, ZHANG Lin, ZHOU Jia-xi. Parametric optimization of hydro-pneumatic suspension of a heavy mining dumper[J]. Journal of Vibration and Shock,2012, 31(24):98-101,107.
[9]王 濤,陶 薇. 考慮隨機因素的汽車懸架參數多目標穩健優化[J]. 振動與沖擊, 2009, 28(11):146-149.
WANG Tao, TAO Wei. Multi-objective robust optimization of automobile suspension parameters considering random factors[J]. Journal of Vibration and Shock,2009, 28(11):146-149.
[10]ISO2631-1:1997(E), International standards origination, mechanical vibration and shock evaluation of human exposure to whole-body vibration Part1, General requirements[S].
[11]余志生. 汽車理論(第5版)[M]. 北京:機械工業出版社, 2009.
[12]段虎明,石 峰,謝 飛,等. 路面不平度研究綜述[J]. 振動與沖擊,2009,28(9):95-101.
DUAN Hu-ming,SHI Feng,XIE Fei, et al. A survey of road roughness study[J]. Journal of Vibration and Shock,2009,28(9):95-101.
[13]陳杰平, 陳無畏, 祝 輝, 等. 基于Matlab/Simulink的隨機路面建模與不平度仿真[J]. 農業機械學報, 2010,41(3): 11-15.
CHEN Jie-ping, CHEN Wu-wei, ZHU Hui, et al. Modeling and simulation on stochastic road surface irregularity based on Matlab/Simulin[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010,41(3): 11-15.
[14]杜 恒,魏建華.基于遺傳算法的連通式油氣懸架平順性與道路友好性參數優化[J].振動與沖擊,2011,30(8):133-138.
DU Heng, WEI Jian-hua. Parameters optimization of interconnected hydro-pneumatic suspension for road comfort and road-friendliness based on genetic algorithm[J]. Journal of Vibration and Shock,2011,30(8):133-138.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03