基于A3988+MCU的低成本電機伺服系統(tǒng)設(shè)計
2014-08-08 01:09:40王顯軍
電機與控制應(yīng)用 2014年2期
劉 洋, 王顯軍, 張 岳
(1. 中國科學院 長春光學精密機械與物理研究所,吉林 長春 130033; 2. 中國科學院大學,北京 100039)
0 引 言
傳統(tǒng)的力矩電機和光電編碼器組成的閉環(huán)伺服控制系統(tǒng)中,一般采用集成的IGBT芯片驅(qū)動電機,例如采用三菱公司的IPM系列產(chǎn)品。集成的IGBT芯片對于驅(qū)動PWM信號要求較高,PWM信號使用不當容易使IGBT電路損壞,在小功率的電機伺服系統(tǒng)中采用IPM驅(qū)動電機成本較高,也無法發(fā)揮IPM的大功率驅(qū)動能力,造成了資源的浪費。本文介紹一種基于A3988+MCU的低成本直流力矩電機伺服控制系統(tǒng)。A3988是Allegro公司制造的用于驅(qū)動2路步進電機的集成芯片,也可以用于驅(qū)動4路直流力矩電機[1]。A3988與集成的IPM芯片相比成本較低,功耗較低,能同時驅(qū)動多路直流力矩電機,因而適合應(yīng)用在低功耗的直流力矩電機伺服控制系統(tǒng)中。
伺服系統(tǒng)中采用A3988驅(qū)動直流力矩電機,且A3988對于輸入信號要求較低,使得伺服系統(tǒng)對控制器的要求也降低了。C8051F系列MCU成本較低[2],所集成的PCA0模塊能夠提供較高精度的PWM作為A3988的輸入信號[3]。
1 原 理
1.1 A3988的使用方法
A3988應(yīng)用在驅(qū)動步進電機時,可看作一個電流控制電路,每組控制電路通過外部配置I0x、I1x和PHASEx可以輸出16種電流脈沖狀態(tài),共有4組獨立控制電路,兩組電路共同作用可以用于控制1路步進電機。當A3988應(yīng)用在驅(qū)動直流力矩電機時,只應(yīng)用在16種狀態(tài)中電壓差最大的兩種狀態(tài)中,A3988可當作PWM放大器。A3988用于驅(qū)動直流力矩電機狀態(tài)表如表1所示。
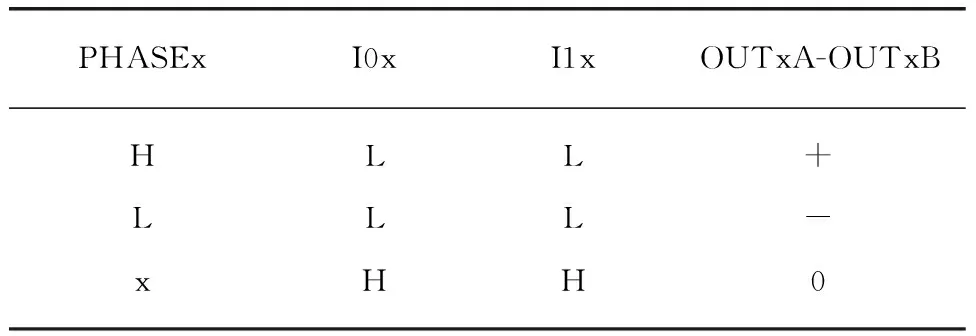
表1 A3988用于驅(qū)動直流力矩電機狀態(tài)表
如表1中3種狀態(tài)所示,將OUTxA和OUTxB分別接到電機正負兩端當,再向I0x和I1x輸入相同的PWM時,通過調(diào)整PHASEx,可達到使直流力矩電機向兩個方向轉(zhuǎn)動的目的。這與傳統(tǒng)的利用IPM單極雙向方式驅(qū)動直流力矩電機達到了相同的效果,其中OUTxA和OUTxB的幅值即電機的母線電壓,可以通過配置A3988的VBB1和VBB2來實現(xiàn),母線電壓的可調(diào)范圍為0~36V。
1.2 伺服系統(tǒng)MCU控制器的設(shè)計
從表1中可看出,利用A3988作為電機的單極控制驅(qū)動芯片,設(shè)計驅(qū)動PWM時無需考慮利用IPM驅(qū)動電路時用于避免上下橋IGBT同時導通燒毀IPM的死區(qū),因此控制器輸出PWM的邏輯更簡單,C8051F系列MCU就可完成任務(wù),相比DSP、FPGA等控制器,節(jié)約了成本。本文選用C8051F121作為伺服系統(tǒng)控制器。
利用C8051F系列MCU自帶的可編程邏輯陣列(PCA0)產(chǎn)生用于驅(qū)動直流電機的多路高精度PWM,通過CEXx端口輸出,即輸入到A3988的I0x和I1x的控制信號。由于PCA0模塊受MCU的CPU干預(yù)較少,也不被其他中斷影響,所以PCA0的計數(shù)器具有較高的精度,MCU工作在100MHz,通過在PCA0中斷服務(wù)程序中對PCA0計數(shù)器初值進行重新賦值可改變定時器溢出周期,從而使PWM頻率在10~15kHz范圍內(nèi)。此時PWM的分辨率可以達到6667~10000,與DSP等控制器產(chǎn)生的PWM精度相仿。
1.3 基于A3988+MCU的伺服系統(tǒng)設(shè)計
基于A3988+MCU伺服控制硬件系統(tǒng)設(shè)計框圖如圖1所示。
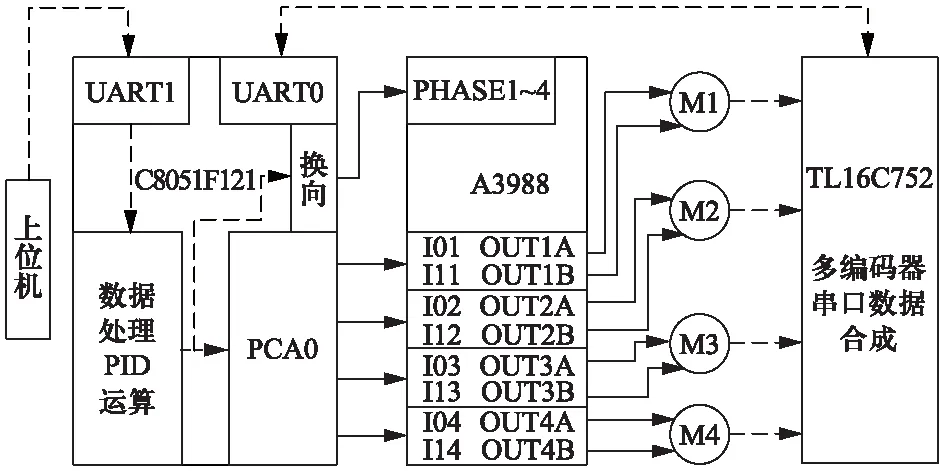
圖1 基于A3988+MCU伺服控制系統(tǒng)框圖
如圖1所示,實線表示控制信號,虛線表示數(shù)據(jù)或指令。Mx表示配備有編碼器的直流電機。設(shè)計主要針對實驗室研發(fā)的配備有高精度串口型數(shù)據(jù)光電編碼器和小功率直流力矩電機的轉(zhuǎn)臺系統(tǒng)。
編碼器需要單片機通過串口觸發(fā),編碼器反饋位置數(shù)據(jù)[4]。通過上位機控制不同電機的不同運動狀態(tài)。圖2是控制兩路電機的軟件流程圖。

圖2 兩路電機控制軟件流程圖
圖2的軟件流程圖中,左側(cè)為主函數(shù),右側(cè)為PCA0中斷服務(wù)程序(PCA0計數(shù)器溢出時進入)。軟件實現(xiàn)中另外兩個中斷UART0和UART1的服務(wù)程序分別用來接收編碼器數(shù)據(jù)和上位機控制指令。上位機控制指令主要是控制兩路電機的定點或者定速運動。軟件中PCA0定時器溢出周期為100μs,即PWM的頻率為10kHz,通過PCA0的中斷服務(wù)程序流程圖可看到COUNTER用來記錄PCA0定時器溢出次數(shù),每溢出20次清0,分別在COUNTER=0和COUNTER=10時對M1編碼器和M2編碼器進行觸發(fā),所以系統(tǒng)對兩路編碼器的采樣頻率均為: 10kHz/20=500Hz。
2 試 驗
試驗轉(zhuǎn)臺由小功率的直流力矩電機和實驗室研發(fā)的24位高精度光電編碼器組成,通過串口觸發(fā)信號觸發(fā),編碼器上傳串口型位置數(shù)據(jù),試驗中編碼器與MCU通信的波特率為115200b/s, 也可設(shè)置為230400b/s。伺服系統(tǒng)中A3988的母線電壓為8V。
2.1 雙閉環(huán)PI參數(shù)的確定
利用電路板和轉(zhuǎn)臺進行開環(huán)試驗,記錄試驗數(shù)據(jù),并利用試驗數(shù)據(jù)和電機各項參數(shù),通過MATLAB的Simulink模塊對轉(zhuǎn)臺系統(tǒng)模型速度位置雙閉環(huán)進行仿真,得到理論上的速度環(huán)PI參數(shù)和位置環(huán)PI參數(shù),最終通過閉環(huán)試驗確定合適的雙閉環(huán)PI參數(shù)。
2.2 定速試驗和定點試驗
定速試驗中設(shè)定轉(zhuǎn)臺轉(zhuǎn)動速度為10°/s,定點試驗中設(shè)定的定點位置為90°,圖3、圖4為轉(zhuǎn)臺系統(tǒng)的定速、定點試驗結(jié)果。
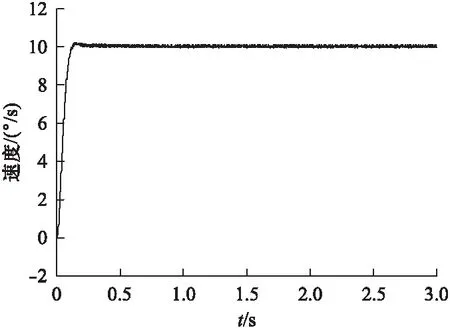
圖3 轉(zhuǎn)臺定速試驗
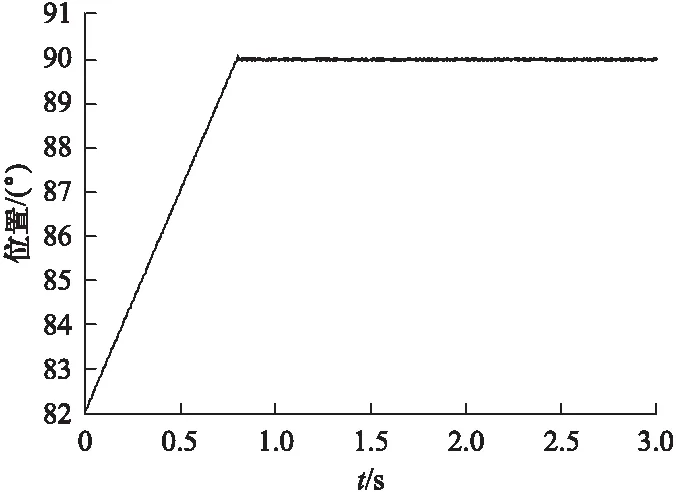
圖4 轉(zhuǎn)臺定點試驗
由試驗可看出,基于A3988+C8051F121的伺服控制系統(tǒng)對小功率轉(zhuǎn)臺系統(tǒng)的定速控制誤差范圍在2%~3%,定點控制誤差在10″以內(nèi)。在定點和定速控制上均有較高的精度。
3 伺服系統(tǒng)對比
3.1 運動效果對比
對于大功率的驅(qū)動要求和永磁同步電機等無刷電機的驅(qū)動,集成的IGBT芯片有明顯優(yōu)勢。對于基于直流力矩電機的小功率轉(zhuǎn)臺系統(tǒng)控制,分別利用A3988和傳統(tǒng)的集成IGBT芯片驅(qū)動,運動效果沒有明顯區(qū)別。PWM的分辨率精度一致,使用由IGBT組成的驅(qū)動電路驅(qū)動電機要考慮避免IGBT上下橋短路的死區(qū)問題,同樣母線電壓下A3988的驅(qū)動能力會更加出色,對電源的利用率也更高。
3.2 開發(fā)成本對比
在軟件實現(xiàn)上A3988對于控制器的驅(qū)動信號要求較低,只需要一路PWM波和一個I/O口來控制電機,由IGBT組成的驅(qū)動電路,對控制器輸出的控制信號要求較復(fù)雜,同時還要考慮死區(qū)等問題,增加了軟件實現(xiàn)的復(fù)雜性,提高了軟件成本。
在硬件電路上,A3988對于外圍電路的配置只需配置母線電源,與控制器的控制信號可以直接相連接。集成的IGBT芯片對于外圍電路的配置要求較復(fù)雜,需要多路隔離電源,驅(qū)動方式也需通過片外自行設(shè)計。
在伺服系統(tǒng)的成本上,基于A3988+MCU的伺服系統(tǒng)硬件成本是普通DSP+IPM的20%~25%,成本下降了75%~80%,較大程度上
降低了對于小功率直流力矩電機伺服控制系統(tǒng)的開發(fā)成本。在功率允許的條件下驅(qū)動多路電機時,基于A3988的伺服系統(tǒng)的優(yōu)勢更加明顯。例如采用同樣的DSP作為控制器,基于IPM的驅(qū)動器只能驅(qū)動一路電機,基于A3988的驅(qū)動器最多能驅(qū)動4路電機,提高了DSP控制器的利用率。
4 結(jié) 語
通過試驗驗證和不同伺服系統(tǒng)的對比,對于小功率直流力矩電機伺服控制系統(tǒng)的設(shè)計,相比傳統(tǒng)的DSP+IPM的設(shè)計方案,基于A3988+MCU的設(shè)計方案在軟、硬件方面均能在保證控制效果的前提下節(jié)約成本,硬件成本下降了75%~80%。在功率允許的條件下,驅(qū)動多路電機時,基于A3988的伺服系統(tǒng)相比基于IPM的伺服系統(tǒng)節(jié)約成本的優(yōu)勢更明顯。
【參考文獻】
[1] 王爍,田書林,戴志堅.基于A3988電機驅(qū)動芯片的電機控制電路設(shè)計[J].國外電子測量技術(shù),2010,29(7): 65-67.
[2] 王曉明.電動機的單片機控制[M].北京: 北京航空航天大學出版社,2007.
[3] 新華龍電子有限公司.C8051F12X與C8051F13X系列混合信號ISP FLASH微控制器數(shù)據(jù)手冊[G].2004.
[4] 王顯軍.基于SOC單片機的高集成度光電編碼器電路設(shè)計[J].光學精密工程,2011,19(5): 1082-1086.
