基于虛擬參考站技術的組合差分信息生成研究與實現
2014-07-25 05:17:50史小雨鮑志雄潘國富
導航定位學報 2014年2期
關鍵詞:系統
史小雨,鮑志雄,潘國富
(廣州中海達衛星導航技術股份有限公司,廣州 511400)
1 前言
無線通訊、因特網應用的蓬勃發展,帶動了傳統差分定位測量模式的新一輪變革,為滿足高精度動態導航定位服務領域要求,實現區域范圍內厘米級、分布均勻、高可靠性的實時動態定位應用,以區域永久連續運行參考站網絡為基礎的網絡RTK(real time kinematic,RTK)定位技術應運而生。虛擬參考站(virtual reference station,VRS)技術由于具有通用性強、操作簡單、性能可靠等優點日益成為網絡RTK領域最成功、應用最廣泛的解決方案[1]。
我國北斗衛星導航系統(BeiDou navigation satellite system,BDS)經過了北斗系統一代的過渡后有了快速的發展。2011年底,擁有11顆星的北斗系統具備了初始運行能力;2012年12月底,中國衛星導航系統管理辦公室公布其正式接口控制(interface control document,ICD)文件,標示北斗系統開始提供覆蓋中國及周邊地區的正式運行服務。預計到2020年,北斗系統全面建設完畢。屆時,由30余顆衛星組成的北斗系統將提供覆蓋全球的高精度、高可靠的定位、導航和授時服務。隨著北斗系統的不斷完善,建立北斗系統連續運行 參 考 站 (continuously operating reference stations,CORS)的需求也將日益擴大,基于這個背景,本文著重研究了全球定位系統(global positioning system,GPS)、格拉納斯衛星導航系統(global navigation satellite system,GLONASS)及BDS等系統組合虛擬參考站技術中的基線解算、長距離參考站間整周模糊度計算及差分信息生成,并通過編程實現驗證了該方法的可用性和可靠性。
2 GPS/GLONASS/BDS組合數據處理
2.1 時間系統與變換
為了精密導航與定位的需要,三個系統各自建立了自己的時間系統。其中GPS時間系統稱為GPS時(GPST)。由GPS主控站的原子鐘控制,屬地方原子時。其秒長與國際單位制 [SI]的定義相同,但與國際原子時(international atomic time,IAT)的原點不同,二者關系為

GPS時(GPS time,GPST)與協調世界時(coordinated universal time,UTC)在 1980-01-01 T00:00:00相一致。由于GPST沒有閏秒,所以隨著時間的積累,兩者之間的差別將表現為秒的整數倍,二者關系為

GLONASS采用的時間系統是GLONASS時(GLONASS Time,GLONASST),與協調時具有相同的閏秒,但有一個3h的偏移常數。即

北斗系統的時間基準為北斗時(BeiDou navigation satellite system time,BDT)。BDT與GPST一樣,均采用SI秒為基本單位連續累計,不閏秒,起始歷元為2006-01-01UTC 00:00:00,采用周和周內秒計數。因此BDT與GPST固定相差14s。
由于接收機自主交換格式(receiver independent exchange format,RINEX)文件歷元時間為GPST,所以解算時都將GLONASS與BDS都歸算至GPST,具體轉換關系為

實際數據處理時,RINEX導航文件采用的是UTC時間,因此,一般只考慮閏秒數即可。
2.2 坐標系統與變換
對于坐標系統而言,GPS采用的是WGS84坐標系,GLONASS采用PZ-90坐標系,而BDS采用的是CGCS2000坐標系。在進行組合數據處理時,為了解算方便,一般將GLONASS及BDS都轉換至WGS84系統下,相關的轉換算法及參數在其他文獻里都有詳細的說明[6],此處不在贅述。
2.3 參考星選擇
由于三個系統之間的載波頻率互不相同,所以在處理GPS/GLONASS/BDS組合觀測值時候需要為三個系統選取不同的參考衛星。對于北斗系統而言,它采用了與GPS系統相同的碼分多址技術,處理方法與GPS類似,可以選取高度角最大的衛星作為參考衛星。但對于GLONASS系統而言,由于頻分多址技術的影響,在組建雙差觀測值時不能將雙差模糊度與單差模糊度進行分離,法方程奇異,必須利用偽距求出參考衛星的站間單差模糊度才能消除這種奇異性。為了減少偽距誤差對模糊度固定的影響,需選用與其他衛星頻率差較小的衛星作為參考星[2,4]。
3 通用VRS觀測值計算模型
3.1 相位VRS觀測值數學模型(設i為參考星)
在主參考站A與VRS間求站際一次差,得

式(5)中,λ為載波波長;φ為載波相位觀測值;ρ為星站距離;I為電離層延遲;T為對流層延遲;O為衛星軌道誤差;M為多路徑效應誤差;ε為接收機噪聲;δti為接收機鐘差。令S=-I+T+O,則S表示綜合距離相關誤差。將VRS觀測值移至方程左端,式(5)可變為

式(6)中,ref為參考星。對于任意衛星在任意歷元,ΔSrefAV、ΔMrefAV、cΔδtAV為常量且可在差分計算中消除,可將其合并為常數項量;另外VRS位置接收機鐘差、整周模糊度均為零值、因此方程式(6)可轉化為
則根據觀測方程式(7),非差VRS觀測值完整的數學計算式為
此時,參考星i相應的觀測值:

VRS相位觀測由主參考站的非差觀測值、幾何配置值以及VRS與主參考站間基線上的誤差改正數組成,是對于VRS位置相位觀測值(小數周觀測量)的數學模擬,與實際參考站相位觀測值一樣,VRS相位觀測值仍然是一個相對觀測量,對于移動用戶而言應用VRS相位觀測值進行計算與常規參考站相位觀測值的處理一樣,仍然需要計算整周模糊度[9]。
3.2 偽距VRS觀測值數學模型(設i為參考星)
與非差相位觀測值的推導類似,VRS偽距觀測值的形式為

此時,參考星i相應的觀測值

4 長距離參考站間整周模糊度的計算
由于CORS站彼此之間距離均較遠,為實現快速可靠的模糊度解算檢核以及精確誤差建模,必須預先把CORS網絡內獨立的參考站組成網絡,其核心問題是如何能實時正確地解算參考站間的整周模糊度,進而準確地估計距離相關誤差源的影響(如:對流層延遲和電離層延遲等)。
參考站網絡利用參考站的精確坐標作為已知信息來改善參考站間整周模糊度的固定,進而準確地估計站間實時的對流層延遲和電離層延遲等距離相關誤差影響,對處在參考站網絡中的流動站,就可以根據周圍的參考站間的大氣延遲信息較精確地計算出它和某參考站間的大氣延遲,輔助整周模糊度解算。因此,參考站間整周模糊度的在線解算是網絡RTK的基礎。
目前對長基線模糊度解算方法國內外許多學者開展了許多研究工作,文獻 [6]提出了參考站間的單歷元整周模糊度搜索法,該方法的主要思想是不解方程組,直接利用測站坐標已知、模糊度為整數和雙頻整周模糊度之間的線性關系這三個條件進行搜索,但其原理并不完善、可靠,故該方法沒得到廣泛應用。相比文獻 [1]的快速整周模糊度解算是一種有效的長基線模糊度固定方法,其解算思路是在常規的 “三步法”基礎上使用并行濾波和擴波技術:先對寬巷模糊度和電離層無關模糊度并行進行卡爾曼濾波,由于寬巷的長波特性,濾波過程中必然先得到求解,再將其作為己知值代入電離層無關組合,使電離層無關組合波長由0.006m擴大到0.107m,最后通過對天頂對流層延遲濕分量的估計和對L1模糊度的整數估計來固定模糊度并計算參數固定解。本文依據上述方法,結合區域CORS系統參考站網絡的特點,給出一種快速且易實現的模糊度固定方法,并成功應用在中海達CORS軟件ZNetVRS中,即先利用寬巷組合的長波特性確定寬巷模糊度,然后通過估計對流層延遲干濕分量,利用電離層無關組合分離出L1模糊度并通過卡爾曼濾波進行參數估計[3]。具體處理流程見圖1。
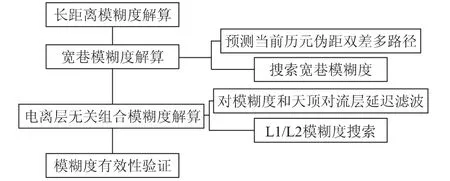
圖1 模糊度解算和大氣延遲計算模塊結構圖
5 系統實現與分析
5.1 軟件實現
根據上述理論與方法,在西南交通大學與廣州中海達公司聯合開發的CORS服務器軟件ZNetVRS基礎上增加和修改了若干模塊,主要包括BDS與GLONASS數據預處理、GPS/GLONASS/BDS組合模糊度固定、差分數據生成與播發等,從而開發出面向GPS/GLONASS/BDS多系統組合VRS解算軟件。用戶可以自主選擇接入的衛星系統,同時軟件支持多種數據播發格式,包括RTCM 2.3、RTCM3.1以及最新的RTCM3.2。
5.2 實例分析
為了檢驗ZNetVRS系統的理論正確性,測試系統精度指標與穩定性,在我國東部某市進行了實踐建設。整個項目一共包含11個參考站,由基準站系統,網絡通訊系統,中心服務器解算系統,移動站系統構成。基準站采用中海達VNet6三星雙頻接收機,天線選用抑制多路徑的扼流圈天線。具體測站分布如圖2所示。
5.3 系統測試結果與精度指標
經過近一年的實踐檢驗,該系統能長期穩定工作,按照CORS系統建設的規范要求,對系統進行了多方面的詳細測試,下面主要介紹RTK精度測試的結果。測試方案:在網內外均勻布設測試點,均勻分布在系統覆蓋區域及周邊。測試點盡可能利用該市已有的GPS控制點,直接獲得參考坐標,非控制點的測試點通過靜態測量和基線解算得到參考坐標,將各測試點的實時RTK定位結果與參考坐標比較,評定定位精度。一共選擇了20個測試點,在各個測試點上連續采集30個以上歷元的固定解結果進行精度分析
(1)內符合精度
內符合精度是單次觀測值均方根誤差,可以反應出定位結果的收斂情況,通過式(1)計算
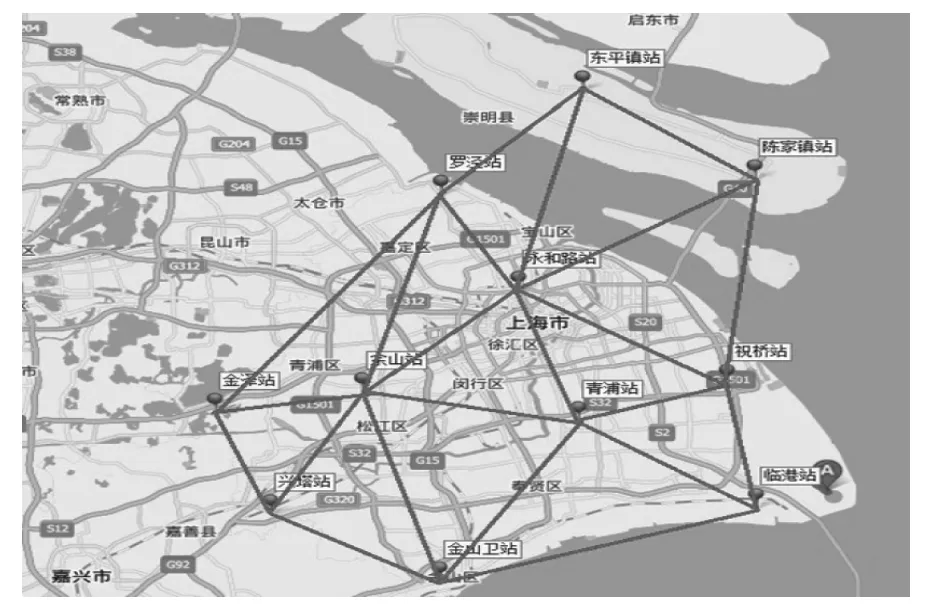
圖2 某市CORS站分布圖

式(12)中,n為測試點上的觀測子樣數、n≥20,v是測試點上每個觀測子樣與其觀測子樣平均值的差值,統計得到所有測試點內符合精度如表1所示。
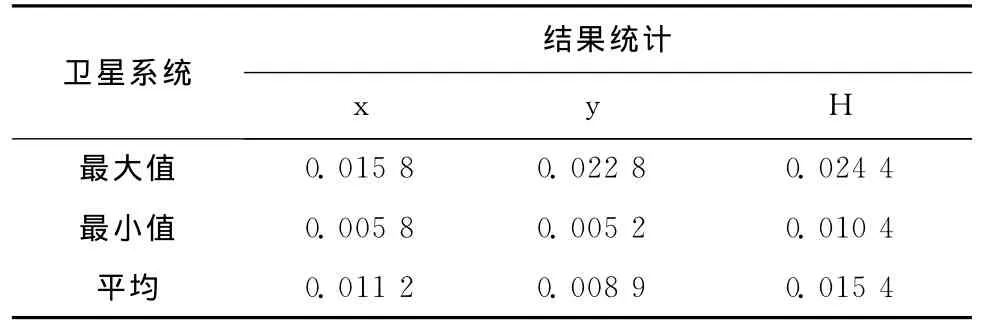
表1 系統內符合精度/m
(2)外符合精度
外符合精度需要測試點的坐標參考值,其直接反映出系統快速或實時定位的精度,通過式(13)進行計算

式(13)中,Δ是測試點上每個觀測子樣與其參考值的差值,統計得到所有測試點外符合精度如表2所示。
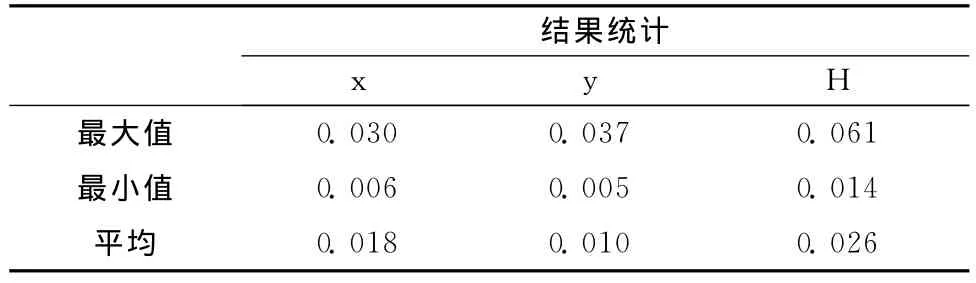
表2 系統外符合精度/m
可以看出,該CORS系統內符合精度為平面x方向1.1cm、y方向1.0cm、高程1.5cm;外符合精度達到平面x方向1.8cm、y方向1.0cm、高程2.6cm。一般CORS系統的精度設計指標為平面精度σ平面<5cm,垂直精度σ垂直<10cm,因此測試結果表明該CORS系統能夠提供穩定可靠的實時動態定位服務,滿足厘米級網絡差分定位需要。
6 結束語
本文主要研究了基于VRS的網絡RTK技術的核心算法,主要包括中長基線整周模糊度的在線固定和VRS網絡差分信息的生成與發布。中長基線整周模糊度固定采用以下方法:先利用寬巷組合的長波長特性確定寬巷模糊度,然后通過估計對流層延遲干濕分量,利用電離層無關組合分離出L1的整周模糊度。實驗證明該方法可靠有效,可以正確固定中長基線模糊度信息。
根據上述理論與方法開發CORS服務器軟件ZNetVRS,并結合廣州中海達實際CORS項目,對軟件的精度進行測試。結果表明利用該軟件,系統內符合精度為平面x方向1.1cm、y方向1.0 cm、高程1.5cm;外符合精度達到平面x方向1.8cm、y方向1.0cm、高程2.6cm。
[1]黃丁發,周樂韜,劉經南,等.基于Internet的VRS/RTK定位算法模型及實驗研究[J].武漢大學學報:信息科學版,2007,32(3):220-224.
[2]史小雨,袁本銀,鮑志雄.GPS/GLONASS/COMPASS組合定位模糊度方法研究與實現 [C]//第四屆中國衛星導航學術年會論文集.武漢:中國衛星導航學術年會組委會,2013.
[3]袁本銀,高成發,柯福陽,等.GPS/VRS虛擬觀測值生成與發布研究[J].測繪工程,2009,18(5):27-30.
[4]史小雨,程鵬飛,蔡艷輝,等.基于單差搜索的 GLONASS雙差模糊度固定方法[J].測繪科學,2013,38(5):143-145.
[5]李成鋼.網絡GPS/VRS系統高精度差分改正信息生成與發布研究[D].成都:西南交通大學,2007.
[6]高星偉,李毓麟,葛茂榮.GPS/GLONASS相位差分的數據處理方法[J].測繪科學,2004,29(2):22-24.
[7]HABRICH H.Geodetic Applications of the Global Navigation Satellite System(GLONASS)and of GLONASS/GPS Combinations[D].Switzerland:University of Berne,1999.
[8]顏琳.北斗/GPS雙模CORS網研制與測試技術研究[D].上海:上海交通大學,2013.
[9]李成鋼.網絡GPS/VRS系統高精度差分改正信息生成與發布研究[D].成都:西南交通大學,2007.
[10]張紹成.基于GPS/GLONASS集成的CORS網絡大氣建模與RTK算法實現[D].武漢:武漢大學,2010.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32