船舶直線航行控制技術(shù)綜述
2014-07-24 01:56:38中國船級社
中國船檢 2014年8期
中國船級社 劉 超
直線航行是船舶運行的重要形式之一,對于降低船舶運營成本,提高船舶航行效率、縮短航行時間具有重要的意義。然而,在實際航行中,直線航行會受到諸多因素的限制。首先,船舶的航跡模型具有較強的非線性特性,傳統(tǒng)閉環(huán)控制策略很難處理這一復(fù)雜的系統(tǒng);其次,船舶航行系統(tǒng)為典型的欠驅(qū)動系統(tǒng),即此類系統(tǒng)的控制變量比控制輸入的數(shù)量多,進(jìn)而增大了控制器設(shè)計的難度;第三,通常情況下,船舶的運行環(huán)境較為惡劣,易受到風(fēng)浪等因素(如航行中會受到風(fēng)流壓差角)的影響,從而導(dǎo)致船舶實際航跡偏離期望的航行路線。因此,設(shè)計高性能的航行控制器,保證船舶的直線航行、節(jié)約船舶運營成本具有十分重要的意義。本文主要介紹船舶航行的非線性模型和航行控制器設(shè)計中常用的理論技術(shù),為實際中船舶航行控制器設(shè)計提供有價值的參考依據(jù)。
船舶直線航行理論模型
實際中,船舶航行示意圖和航跡示意圖分別如圖1和圖2所示。
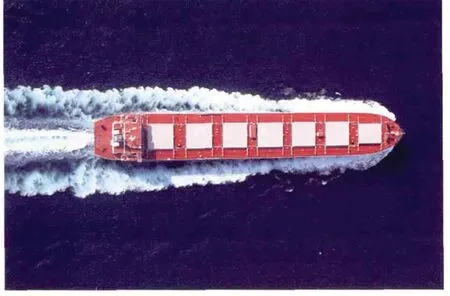
圖1 實習(xí)船航行示意圖
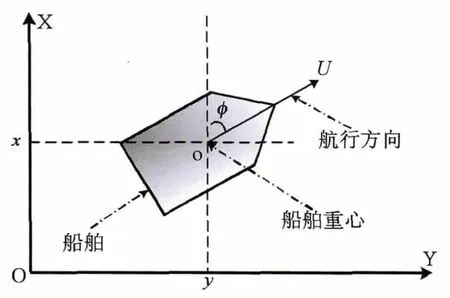
圖2 船舶航跡示意圖
圖1顯示,直線航行是船舶作業(yè)的重要形式,在實際應(yīng)用中具有重要的價值。圖2展示了船舶航行中的控制變量。圖2中,x,y分別為船舶所在海洋坐標(biāo)系XOY中的橫縱坐標(biāo),U為船舶航行的實際速度(同時表示船舶的航行方向);φ表示航向角,假設(shè)船舶期望的航行方向為X軸正方向,則φ表示船舶實際航行方向與X軸之間的夾角。
在理論分析中,通常采用Nomoto理論模型來表示船舶航行模型,其具體形式如下
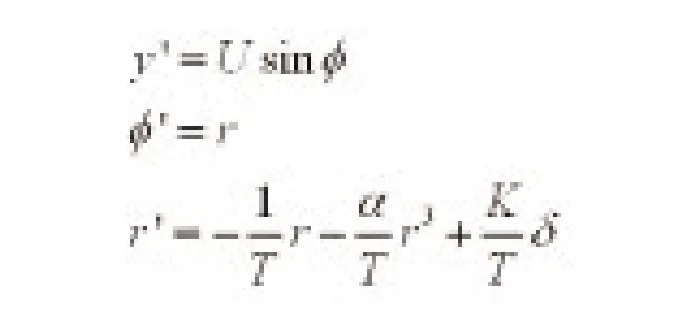
式中:r 為艏搖角角速度;δ 為控制輸入,其物理意義為舵角;T,K,α 表示船舶控制系統(tǒng)參數(shù)。顯然,Nomoto 模型為欠驅(qū)動模型,并且具有很強的非線性。
船舶直線航行控制器設(shè)計的目標(biāo)就是通過設(shè)計舵角δ,使船舶在海洋坐標(biāo)系XOY中,能夠沿X軸保持直線行駛,即通過改變船舶舵角的輸出,來調(diào)整船舶的運行方向,保持其直線航行。
船舶航行中的控制技術(shù)
近年來,針對模型中的強非線性、所受擾動的復(fù)雜性,很多先進(jìn)的控制理念和控制技術(shù)應(yīng)用到了這一領(lǐng)域中,并取得了較好的仿真和實驗效果。下面對控制器設(shè)計通常采用的技術(shù)做詳細(xì)的介紹。常用技術(shù)主要:
反饋線性化技術(shù)。由于非線性系統(tǒng)的復(fù)雜性,在理論分析和實際控制中,根據(jù)輸出反饋或者狀態(tài)反饋,通常將非線性系統(tǒng)等價地表示為線性系統(tǒng),從而降低控制器設(shè)計的復(fù)雜性,這一技術(shù)稱為反饋線性化技術(shù)。反饋線性化的核心目的是將原系統(tǒng)的狀態(tài)方程轉(zhuǎn)換為線性的、能控能觀的狀態(tài)方程。一般地,反饋線性化方法包括輸入-狀態(tài)反饋線性化、輸入-輸出反饋線性化、直接反饋線性化和逆系統(tǒng)方法等,其中前兩者較為常用。對于,輸入-狀態(tài)反饋線性化,設(shè)計中要求系統(tǒng)中全部的狀態(tài)變量是可測的,并且轉(zhuǎn)換后的狀態(tài)變量也是可測的。輸入-輸出反饋線性化,不需要系統(tǒng)狀態(tài)變量是可測的,只需要輸出可測且r階可導(dǎo),其中r為系統(tǒng)的相對階數(shù)。
在實際船舶直線航行控制中,如果只考慮系統(tǒng)的鎮(zhèn)定問題,可以采取輸入-狀態(tài)反饋線性化;如果考慮航跡的追蹤問題(即追蹤直線軌跡),則需要采用輸入-輸出反饋線性化,從而提高控制器設(shè)計的效率。
Backstepping技術(shù)。Backstepping技術(shù)是Kokotovic等人于1991年針對具有特定結(jié)構(gòu)的非線性系統(tǒng),提出的一種系統(tǒng)化的控制器設(shè)計方法。這一方法對于改善系統(tǒng)H2/H∞特性,保證系統(tǒng)穩(wěn)定性,提高系統(tǒng)的追蹤精度有良好的效果。這一方法已經(jīng)在航空航天控制領(lǐng)域、船舶控制等領(lǐng)域得到了實際應(yīng)用,并取得了較大的進(jìn)展。一般情況下,Backstepping技術(shù)適用于具有“下三角結(jié)構(gòu)”的系統(tǒng)模型中,而船舶航行欠驅(qū)動系統(tǒng)恰恰屬于這類模型。
Bacstepping技術(shù)設(shè)計中的三要素為:“下三角”結(jié)構(gòu)的系統(tǒng)模型、控制Lyapunov函數(shù)(CLF)和遞歸設(shè)計程序。設(shè)計流程為:首先,將原系統(tǒng)分解為子系統(tǒng);其次,從第一個子系統(tǒng)開始(通常為控制系統(tǒng)輸出),為使每一個子系統(tǒng)實現(xiàn)漸近穩(wěn)定,選擇對應(yīng)的CLF,從而設(shè)計該子系統(tǒng)的虛擬控制輸入;第三,根據(jù)上一個子系統(tǒng)的虛擬輸入,做坐標(biāo)變換,以誤差信號為狀態(tài)變量繼續(xù)設(shè)計對應(yīng)的虛擬輸入;重復(fù)上述過程直到最后一個子系統(tǒng),從而保證整個系統(tǒng)的穩(wěn)定性或者收斂性。
在船舶的直線航行控制中,為降低算法的復(fù)雜性,減少運算量,通常會結(jié)合反饋線性化技術(shù):首先,根據(jù)輸入-輸出反饋或輸入-狀態(tài)反饋,將Nomoto非線性模型轉(zhuǎn)化為具有“下三角結(jié)構(gòu)”的線性模型,而后應(yīng)用Backstepping技術(shù),使系統(tǒng)鎮(zhèn)定,實現(xiàn)船舶的直線航行。
滑模控制技術(shù)。滑模控制理論是魯棒變結(jié)構(gòu)控制理論的主體,是針對非線性系統(tǒng)設(shè)計控制器的一種有效工具。滑模控制技術(shù)的核心思想為,根據(jù)系統(tǒng)的狀態(tài)變量或者追蹤誤差,選擇合適的滑模面。通過控制滑模面的動態(tài)特性和收斂特性,迫使系統(tǒng)按照預(yù)定的“滑模動態(tài)”的狀態(tài)軌跡運行,實現(xiàn)漸近穩(wěn)定或者漸近追蹤。滑模控制技術(shù)具有響應(yīng)快,對系統(tǒng)參數(shù)的魯棒性較好,物理實現(xiàn)簡單等優(yōu)點。通常情況下,滑模面的動態(tài)收斂過程如圖3所示。
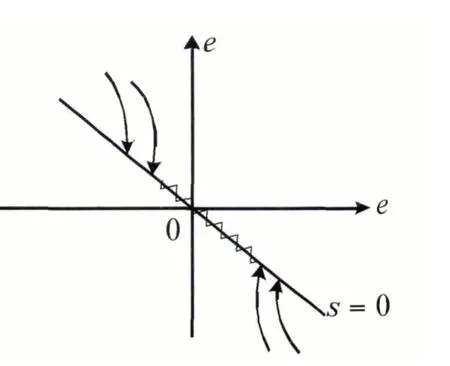
圖3 滑模面動態(tài)示意圖
圖3中,s=0表示滑模面動態(tài),e為誤差或者狀態(tài)變量,e'為誤差或者狀態(tài)變量的導(dǎo)數(shù)。滑模面的選擇對控制器的性能有很大的影響。通常滑模面的選擇分為線性滑模面和非線性滑模面。線性滑模面通常選擇為系統(tǒng)狀態(tài)變量或者追蹤誤差的線性組合;而非線性滑模面在選擇時有很大的空間,如二次切換線、連續(xù)二階滑模、積分滑模等。
在實際船舶直線航行控制中,可以不通過反饋線性化的方法,直接對非線性系統(tǒng)設(shè)計動態(tài)滑模面,通過滑模面的收斂使船舶航行系統(tǒng)鎮(zhèn)定(或追蹤理想航行軌跡),從而有效提高系統(tǒng)響應(yīng)的快速性,并降低系統(tǒng)對參數(shù)擾動的敏感程度。
神經(jīng)網(wǎng)絡(luò)控制技術(shù)。神經(jīng)網(wǎng)絡(luò)控制是智能控制技術(shù)的一種,屬于現(xiàn)代數(shù)學(xué)的范疇,是處理非線性系統(tǒng)的一種有效工具。這一方法通過模仿生物神經(jīng)網(wǎng)絡(luò)行為,從而對非線性系統(tǒng)進(jìn)行并行分布式控制。神經(jīng)元網(wǎng)絡(luò)系統(tǒng)的設(shè)計核心分為三個部分:神經(jīng)元模型、神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)、神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)方法。從神經(jīng)元模型的角度,神經(jīng)元分為線性處理單元和非線性處理單元;從神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)分析,可以分為前向網(wǎng)絡(luò)、反饋網(wǎng)絡(luò)和自組織網(wǎng)絡(luò),其中比較常用的有Hopfield網(wǎng)絡(luò)、RNN網(wǎng)絡(luò);神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)方法分為有導(dǎo)師學(xué)習(xí)(相關(guān)學(xué)習(xí)、糾錯學(xué)習(xí)等)和無導(dǎo)師學(xué)習(xí)。神經(jīng)網(wǎng)絡(luò)控制技術(shù)通過訓(xùn)練網(wǎng)絡(luò),來逼近模型中的非線性因素。因此,網(wǎng)絡(luò)越復(fù)雜對非線性逼近越好,同時控制器的運算耗時也越大。
在船舶直線航行控制中,由于船舶航行模型具有較強的非線性,因此可以選擇合適的人工神經(jīng)網(wǎng)絡(luò)(如Hopfield網(wǎng)絡(luò))逼近非線性模型,從而設(shè)計航行控制器。這種方法避免了使用反饋線性化技術(shù),但是控制器的設(shè)計需要同時考慮模型的逼近誤差和系統(tǒng)的實時性。
自適應(yīng)控制技術(shù)。自適應(yīng)控制是控制領(lǐng)域中非常重要的一種控制技術(shù)。由于被控對象中存在元器件的老化等因素,因此會導(dǎo)致模型中的參數(shù)不準(zhǔn)確。自適應(yīng)控制正是針對這類參數(shù)化的不確定提出的。一般地,自適應(yīng)控制器設(shè)計方法分為頻域和時域兩種方法。頻域方法主要針對線性系統(tǒng),通常采用模型參考自適應(yīng)控制;時域方法則可以同時處理線性和非線性系統(tǒng),通常根據(jù)Lyapunov函數(shù)設(shè)計未知參數(shù)的自適應(yīng)律。
在船舶控制技術(shù)中,為了處理模型中的參數(shù)化的不確定,一般會在控制器中同時引入自適應(yīng)策略。例如,將自適應(yīng)控制策略與Backstpping技術(shù)相結(jié)合,通過設(shè)計未知參數(shù)的Tuning Function,可以顯著提高控制系統(tǒng)對未知參數(shù)的魯棒性,提高船舶航直線行控制器的性能。
本文主要研究了船舶直線航行控制中常用的理論模型和相關(guān)自動控制技術(shù)。首先,介紹了船舶航行的非線性Nomoto模型。其次,針對Nomoto模型強非線性的特點,闡述了在控制器設(shè)計過程中通常采用的控制技術(shù)及其具體的實現(xiàn)方式和方法。文中重點描述了反饋線性化技術(shù)、Backstepping技術(shù)、滑模控制技術(shù)、神經(jīng)網(wǎng)絡(luò)控制技術(shù)和自適應(yīng)技術(shù)的原理與設(shè)計流程,同時說明了各種方法的優(yōu)缺點和相互結(jié)合的控制策略。因此,本文對船舶航行控制器的實際設(shè)計與應(yīng)用具有一定的參考價值。相信在我國科研人員的更痛努力下,一定會克服一個又一個理論、實踐難關(guān),使我國屹立于世界船舶強國之列。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
電測與儀表(2014年1期)2014-04-04 12:00:32