模糊Petri網(wǎng)在某型武器載車系統(tǒng)故障診斷中的應(yīng)用
2014-07-03 06:08:08熊盛
兵器裝備工程學(xué)報(bào) 2014年4期
熊 盛
(92155 部隊(duì),海南 三亞 572000)
現(xiàn)代作戰(zhàn)中,機(jī)動(dòng)能力是武器系統(tǒng)作戰(zhàn)效能的重要影響因素,因此機(jī)動(dòng)武器載車系統(tǒng)的可靠性和穩(wěn)定性對(duì)作戰(zhàn)的勝敗有著重大影響。某型武器載車系統(tǒng)包含機(jī)械、電氣設(shè)備和液壓、氣動(dòng)裝置。由于系統(tǒng)中設(shè)備種類多,結(jié)構(gòu)復(fù)雜,工作時(shí)任何一個(gè)部位的故障都可能導(dǎo)致一系列后續(xù)故障的發(fā)生,表現(xiàn)為故障的并發(fā)性;另一方面,同一個(gè)故障也可能由多個(gè)原因造成,多個(gè)不同的原發(fā)性故障沿各自不同的傳播途徑可引發(fā)同一系統(tǒng)級(jí)故障,因此該系統(tǒng)的故障診斷過(guò)程存在不確定性和模糊性[1]。如果采用科學(xué)系統(tǒng)的方法描述故障的產(chǎn)生模式,維修人員則可在較短的時(shí)間內(nèi)實(shí)現(xiàn)對(duì)故障的定位和排除,從而保證載車系統(tǒng)的可靠性和穩(wěn)定性[2]。本文以某型武器載車系統(tǒng)底盤啟動(dòng)故障診斷為例,對(duì)模糊Petri 網(wǎng)在故障診斷中的應(yīng)用方法進(jìn)行了研究。
1 故障診斷模糊Petri 網(wǎng)模型
故障診斷就是利用已知信息去認(rèn)識(shí)這個(gè)含有不可知信息系統(tǒng)的特性、狀態(tài)與發(fā)展趨勢(shì),并對(duì)未來(lái)做出預(yù)測(cè)與決策。采用專家系統(tǒng)進(jìn)行故障診斷是當(dāng)前應(yīng)用較為廣泛的方法,在專家系統(tǒng)中,傳統(tǒng)的知識(shí)表達(dá)方法包括邏輯表示法、語(yǔ)義網(wǎng)絡(luò)表示法、產(chǎn)生式表示法、框架表示法等。這些方法雖然能表達(dá)故障特征的縱向和橫向聯(lián)系,但由于對(duì)故障僅僅是一種靜態(tài)描述,不能表現(xiàn)故障的動(dòng)態(tài)行為,且無(wú)法進(jìn)行并行推理,現(xiàn)實(shí)系統(tǒng)中的模糊性也無(wú)從體現(xiàn),使整個(gè)系統(tǒng)診斷效率受到約束[3]。Petri 網(wǎng)理論是關(guān)于分布式系統(tǒng)和分布式進(jìn)程的理論,它具有較強(qiáng)的描述并發(fā)現(xiàn)象和故障傳播過(guò)程的能力,因而是對(duì)動(dòng)態(tài)系統(tǒng)進(jìn)行建模和分析的重要工具[4]。但是現(xiàn)實(shí)操作中,用戶對(duì)故障現(xiàn)象的描述經(jīng)常存在不確定性或模糊性,例如底盤啟動(dòng)“困難”,振動(dòng)“厲害”等,普通Petri 網(wǎng)建模方法還不能滿足故障診斷的需求。基于此,將模糊產(chǎn)生式規(guī)則與Petri 網(wǎng)相結(jié)合,定義模糊Petri 網(wǎng)模型,利用其可分層的特點(diǎn),將相對(duì)復(fù)雜的故障逐層細(xì)分,縮小范圍,推理出故障原因及可信度[5]。
1.1 故障診斷模糊產(chǎn)生式規(guī)則
故障之間存在著模糊關(guān)系和傳遞關(guān)系,這些關(guān)系可以采用模糊產(chǎn)生式規(guī)則來(lái)描述[6],模糊產(chǎn)生式規(guī)則最簡(jiǎn)單的形式如下:
規(guī)則R1:

命題di表示一組前提或狀態(tài),命題dk表示若干個(gè)動(dòng)作或結(jié)論,CF 為這條規(guī)則的置信度,CF 的值為μi,μi的取值范圍在0 和1 之間。這種形式的模糊產(chǎn)生式規(guī)則表示一個(gè)故障原因?qū)е铝艘粋€(gè)故障模式。模糊產(chǎn)生式規(guī)則的其他形式,如規(guī)則的“與”、“或”關(guān)系均可由此衍生得出,其表達(dá)式如下:
規(guī)則R2:

它表示故障多個(gè)故障d1,d2,…,dn同時(shí)出現(xiàn)導(dǎo)致故障dk的出現(xiàn);
它表示故障多個(gè)故障d1,d2,…,dn中任何一個(gè)或幾個(gè)的出現(xiàn)將導(dǎo)致故障dk的出現(xiàn),此時(shí)的μi與di之間是一一對(duì)應(yīng)的關(guān)系。
1.2 模糊Petri 網(wǎng)定義
模糊Petri 網(wǎng)由庫(kù)所P 和變遷T 組成,它將模糊產(chǎn)生式規(guī)則中的命題看作庫(kù)所,用圓圈“○”表示;將模糊產(chǎn)生式規(guī)則中的推理過(guò)程看作一種變遷,用豎線“|”表示;命題之間的因果關(guān)系用庫(kù)所和變遷之間的有向弧表示。為了更好地解釋模糊Petri 網(wǎng)(Fuzzy Petri Nets),這里將其定義為一個(gè)九元組[7]:FPN(P,T,D,I,O,f,α,β,λ);
其中:P={P1,P2,…,Pn}是一個(gè)有限的庫(kù)所集;T={t1,t2,…,tn}是一個(gè)有限的變遷集;D ={d1,…,dn}是一個(gè)有限的命題集;且P∩T∩D=Φ,︱P︱=︱D︱。
I :T→P∞表示輸入函數(shù),它決定變遷的輸入庫(kù)所;
O:T→P∞表示輸出函數(shù),它決定變遷的輸出庫(kù)所;
f :T→[0,1],變遷的置信度集,它是變遷到一個(gè)0 ~1 間實(shí)數(shù)的映射,即μi=f(ti);
α:P→[0,1],庫(kù)所的置信度集,它是庫(kù)所到一個(gè)0 ~1間實(shí)數(shù)的映射,Pi的置信度為α(Pi);
β:P→D 為庫(kù)所與命題間的映射,即di=β(Pi)。
λ:T→[0,1],為變遷的觸發(fā)閾值集,當(dāng)α(Pi)≥λ 時(shí),變遷ti才會(huì)被觸發(fā)。
根據(jù)上述定義,將1.1 中的模糊產(chǎn)生式規(guī)則用模糊Petri網(wǎng)的形式表達(dá)出來(lái),如圖1 所示,從圖中可以看出,故障狀態(tài)的傳播過(guò)程被直觀地展現(xiàn)出來(lái)。
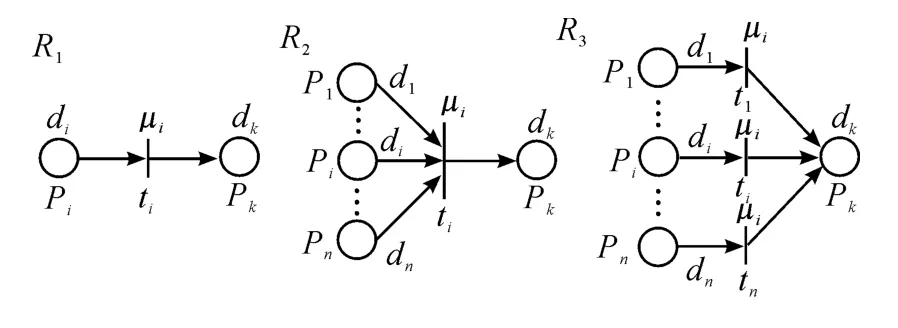
圖1 模糊產(chǎn)生式規(guī)則的模糊Petri 網(wǎng)模型
2 模糊Petri 網(wǎng)故障診斷推理算法
故障診斷與故障傳播之間是互逆關(guān)系,故障診斷是從觀察到的故障現(xiàn)象查找故障的原因,而故障現(xiàn)象正是由故障的傳播造成的。模糊Petri 網(wǎng)描述的是故障的傳播模型,因此基于模糊Petri 網(wǎng)的故障診斷是一個(gè)帶有置信度的反向推理過(guò)程,它從假設(shè)的目標(biāo)故障現(xiàn)象出發(fā),反向查找導(dǎo)致目標(biāo)故障現(xiàn)象發(fā)生的所有路徑及初始故障原因。為了便于推理過(guò)程的進(jìn)行,一般需要定義以下5 種庫(kù)所集合[7]:
1)初始庫(kù)所集合SP:由所有初始庫(kù)所組成的集合,一般用來(lái)表示故障的原因。
2)目標(biāo)庫(kù)所集合GP:由所有目標(biāo)庫(kù)所組成的集合,一般用來(lái)表示系統(tǒng)的故障狀態(tài)。
3)能達(dá)性庫(kù)所集合RS:從Pi經(jīng)過(guò)一系列的變換可以建立起聯(lián)系的庫(kù)所的集合。
4)立即可達(dá)性庫(kù)所集合IRS:從Pi經(jīng)一次變換就能立即達(dá)到的庫(kù)所的集合。
5)相鄰庫(kù)所集合AP:與Pi經(jīng)同一變換能立即達(dá)到的庫(kù)所的集合。
在故障診斷過(guò)程中首先要根據(jù)現(xiàn)場(chǎng)信息重新計(jì)算知識(shí)庫(kù)里的規(guī)則置信度,并根據(jù)模糊Petri 網(wǎng)建立各庫(kù)所的能達(dá)到性集合表,立即可達(dá)性庫(kù)所集合表和相鄰位置集合表。模糊Petri 網(wǎng)故障診斷反向推理具體步驟如下:首先選定一個(gè)故障現(xiàn)象Pi并將其作為目標(biāo)庫(kù)所,然后在IRP 表中查找能導(dǎo)出該故障現(xiàn)象的變遷,按照變遷置信度的大小依次選取這些變遷,若某個(gè)變遷ti的前提庫(kù)所Pj與現(xiàn)場(chǎng)的事實(shí)相匹配,則執(zhí)行該變遷;否則將該變遷的前提庫(kù)所作為子目標(biāo),遞歸執(zhí)行上一步的過(guò)程,直到診斷出故障原因[8]。若沒(méi)有找到能導(dǎo)致該故障現(xiàn)象的規(guī)則,則推理失敗。
3 載車系統(tǒng)故障診斷實(shí)例
在某型武器載車系統(tǒng)中,底盤啟動(dòng)故障的發(fā)生頻率較高,因?yàn)榈妆P的正常啟動(dòng)要求底盤中的燃油系統(tǒng)、啟動(dòng)電路以及機(jī)械傳動(dòng)與控制三個(gè)部分都必須工作正常,任何一個(gè)部分的故障都將導(dǎo)致啟動(dòng)失敗,因此底盤的啟動(dòng)故障具備并發(fā)性和傳播性的特點(diǎn)。本文根據(jù)該型FKWQ 載車系統(tǒng)啟動(dòng)失敗的典型原因和特征,建立底盤啟動(dòng)故障的故障診斷模糊Petri 網(wǎng)模型,并采用反向推理的方法對(duì)該故障進(jìn)行診斷,從而查找出故障原因。
3.1 載車系統(tǒng)底盤啟動(dòng)故障分析與模型建立
首先根據(jù)底盤中電路系統(tǒng)、燃油系統(tǒng)和機(jī)械傳動(dòng)系統(tǒng)各自內(nèi)部的結(jié)構(gòu)原理和以往底盤啟動(dòng)故障診斷與維修經(jīng)驗(yàn)建立故障診斷的知識(shí)庫(kù),該知識(shí)庫(kù)中的規(guī)則采用本文1.1 節(jié)中介紹的模糊產(chǎn)生式規(guī)則來(lái)描述。
R01:IF(油管接頭松動(dòng),油路進(jìn)空氣P1)THEN (燃油系統(tǒng)故障P20)CF=0.98
R02:IF(燃油管路堵塞P2)THEN (燃油系統(tǒng)故障P20)CF=0.86
R03:IF(燃油濾清器堵塞P3)THEN (燃油系統(tǒng)故障P20)CF=0.88
R04:IF(輸油泵不供油或斷續(xù)供油P4)THEN (燃油系統(tǒng)故障P20)CF=0.90
R05:IF(進(jìn)油管漏氣或接頭濾網(wǎng)堵塞P5)THEN (燃油系統(tǒng)故障P20)CF=0.94
R06:IF(噴油器不出油或不霧化P6)THEN (燃油系統(tǒng)故障P20)CF=0.85
R07:IF(調(diào)速器操縱手柄位置不對(duì)P7)THEN (燃油系統(tǒng)故障P20)CF=0.92
R08:IF(蓄電池電力不足P8)THEN (啟動(dòng)電路故障P21)CF=0.98
R09:IF(啟動(dòng)開(kāi)關(guān)接觸不良P9)THEN (啟動(dòng)電路故障P21)CF=0.93
R10:IF(啟動(dòng)繼電器故障P10)THEN (啟動(dòng)電路故障P21)CF=0.90
R11:IF(啟動(dòng)電機(jī)故障P11)THEN (啟動(dòng)電路故障P21)CF=0.86
R12:IF(熄火開(kāi)關(guān)閉合P12)THEN (啟動(dòng)電路故障P21)CF=0.85
R13:IF(易熔線燒斷P13)THEN (啟動(dòng)電路故障P21)CF=0.98
R14:IF(啟動(dòng)機(jī)與飛輪嚙合故障P14)THEN (機(jī)械故障P22)CF=0.96
R15:IF(噴油提前角控制錯(cuò)誤P15)THEN (機(jī)械故障P22)CF=0.93
R16:IF(配氣相位控制錯(cuò)誤P16)THEN (機(jī)械故障P22)CF=0.92
R17:IF(活塞環(huán)或缸套過(guò)度磨損P17)THEN (機(jī)械故障P22)CF=0.90
R18:IF(氣門漏氣P18)THEN (機(jī)械故障P22)CF=0.92
R19:IF(燃燒室容積過(guò)大P19)THEN (機(jī)械故障P22)CF=0.86
R20:IF(燃油系統(tǒng)故障P20)THEN (底盤啟動(dòng)故障P23)CF=0.98
R21:IF(啟動(dòng)電路故障P21)THEN (底盤啟動(dòng)故障P23)CF=0.95
R22:IF(機(jī)械故障P22)THEN (底盤啟動(dòng)故障P23)CF =0.91
根據(jù)以上模糊產(chǎn)生式規(guī)則建立相應(yīng)的故障診斷模糊Petri 網(wǎng)如圖2 所示。
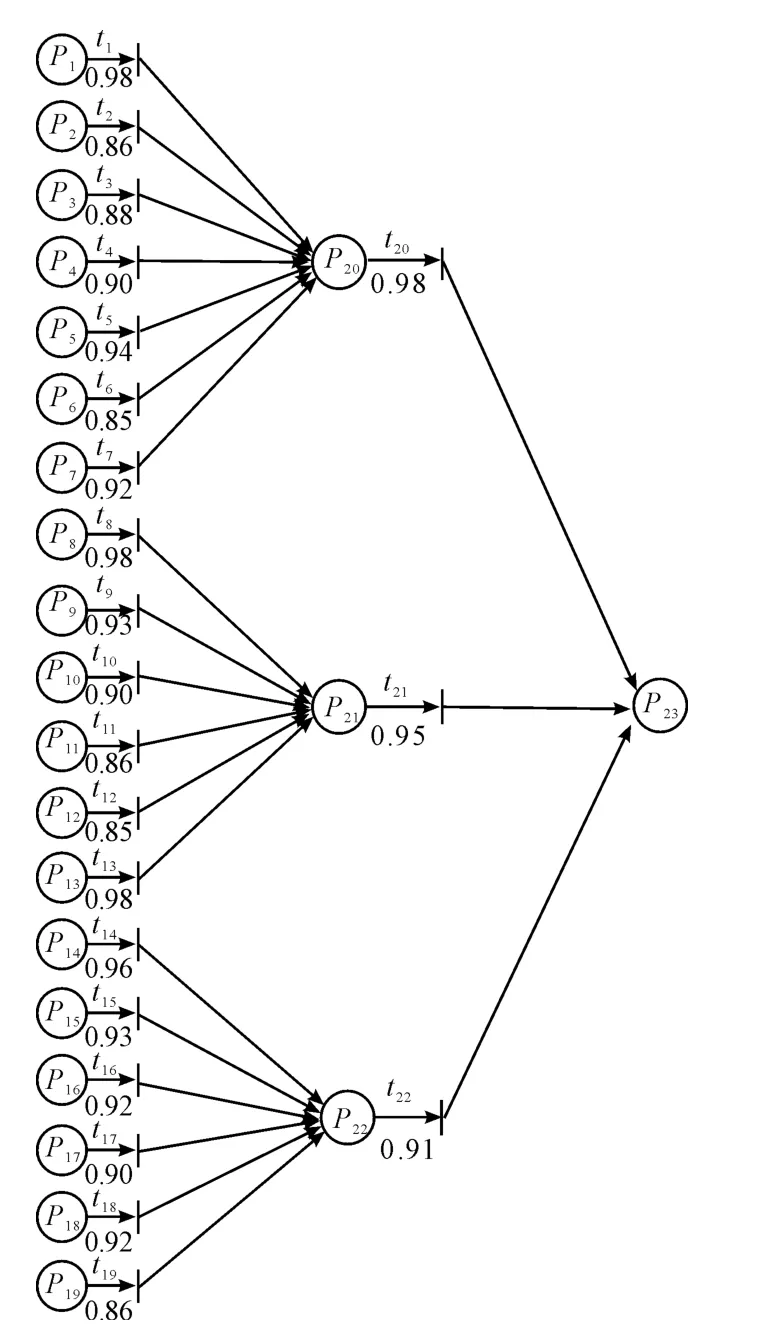
圖2 底盤啟動(dòng)故障診斷模糊Petri 網(wǎng)模型
3.2 基于模糊Petri 網(wǎng)的載車系統(tǒng)底盤啟動(dòng)故障診斷
由圖2 可知,底盤啟動(dòng)故障診斷模糊Petri 網(wǎng)模型中的起始庫(kù)所PS= {P1,P2,P3,P4,P5,P6,P7,P8,P9,P10,P11,P12,P13,P14,P15,P16,P17,P18,P19},目標(biāo)庫(kù)所PG={P23},能達(dá)性庫(kù)所集合、立即可達(dá)性庫(kù)所集合和相鄰庫(kù)所集合如表1所示。
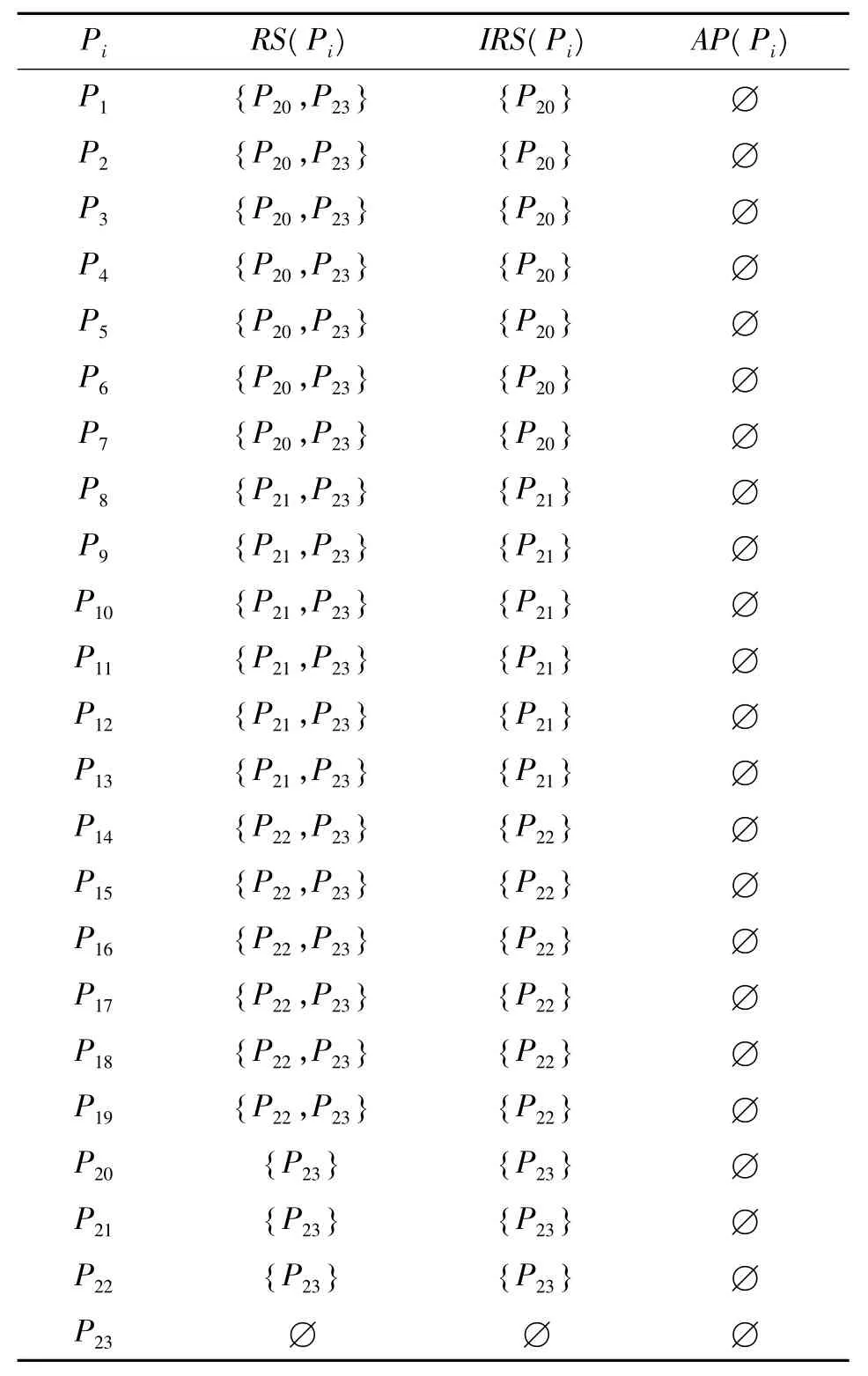
表1 能達(dá)性集合、立即可達(dá)性集合、相鄰庫(kù)所集合
在故障診斷中,設(shè)置所有變遷的觸發(fā)閾值λ =0.75,故障診斷的過(guò)程如下:
1)首先根據(jù)Petri 網(wǎng)模型中的庫(kù)所數(shù)量和變遷數(shù)量初始化兩個(gè)標(biāo)志數(shù)組FLAG_P[22]和FLAG_T[22],數(shù)組中各元素的值可以為0 或者1,用來(lái)標(biāo)記當(dāng)前庫(kù)所和變遷是否已經(jīng)被查詢過(guò),從而避免推理過(guò)程中重復(fù)查詢。當(dāng)前數(shù)組中元素的值均為0,表示尚未被查詢。
2)底盤啟動(dòng)故障P23在表1 中的相鄰庫(kù)所為?,表明沒(méi)有其他故障同時(shí)發(fā)生。再查表1 可知,P23的發(fā)生是由P20、P21或P22引起的,且P20對(duì)應(yīng)的變遷t20的置信度最大(CF =0.98),因此選擇路徑P20→P23,然后將標(biāo)志數(shù)組元素FLAG_P[20]和FLAG_T[20]置1;
3)由于P20不是初始庫(kù)所,所以繼續(xù)反向查找能引發(fā)P20的路徑。從表1 中查出能夠到達(dá)P20的路徑共有7 條,其中庫(kù)所P1對(duì)應(yīng)的變遷t1的置信度最大(CF=0.98),因此選擇路徑P1→P20繼續(xù)反推,并將標(biāo)志數(shù)組元素FLAG_P[1]和FLAG_T[1]置1。由于P1是初始庫(kù)所,因此向用戶詢問(wèn)“油管接頭松動(dòng),油路進(jìn)空氣?”。用戶檢查所有油管接頭后,發(fā)現(xiàn)確實(shí)有接頭松動(dòng),則向系統(tǒng)回答“是”。系統(tǒng)根據(jù)統(tǒng)計(jì)信息計(jì)算出庫(kù)所P1的置信度α(P1)=0.95,由于α(P1)大于預(yù)先設(shè)定的閾值λ=0.75,所以變遷t1 可以被觸發(fā)。相應(yīng)的,庫(kù)所P20的置信度也可計(jì)算出來(lái):α(P20)= α(P1)×0.98 =0.960 4,也大于閾值λ。由此可以判斷“底盤啟動(dòng)故障”的原因是“油管接頭松動(dòng),油路進(jìn)空氣”。至此,推理結(jié)束,故障診斷成功。
4)如果向用戶詢問(wèn)“油管接頭松動(dòng),油路進(jìn)空氣?”。用戶檢查所有油管接頭后,發(fā)現(xiàn)接頭沒(méi)有松動(dòng),向系統(tǒng)回答“未發(fā)現(xiàn)”。系統(tǒng)計(jì)算出庫(kù)所P1的置信度α(P1)=0. 3,由于α(P1)小于預(yù)先設(shè)定的閾值λ,所以變遷t1 不能被觸發(fā)。但是引發(fā)P20的路徑還有6 條,接下來(lái)系統(tǒng)將按照這6 條路徑所對(duì)應(yīng)的變遷的置信度大小次序,重復(fù)進(jìn)行前面的查詢過(guò)程,這里不再贅述。
5)若遍歷完能引發(fā)P20的7 條路徑,仍未找到故障原因,則按照步驟3、4 中的方法,查詢所有能夠到達(dá)P21或P22的路徑,直到找出故障原因?yàn)橹埂H绻闅v完全部路徑后還未找到故障原因,則說(shuō)明故障原因不在知識(shí)庫(kù)中,需要另外查找故障原因。
4 結(jié)束語(yǔ)
在對(duì)某型武器載車系統(tǒng)底盤啟動(dòng)故障進(jìn)行診斷時(shí),采用模糊Petri 網(wǎng)建立的模型使系統(tǒng)知識(shí)邏輯關(guān)系清晰,推理過(guò)程簡(jiǎn)單,且具有圖形直觀性。通過(guò)診斷實(shí)例,充分體現(xiàn)了模糊Petri 網(wǎng)描述系統(tǒng)動(dòng)態(tài)特性、并行特性的能力,而且推理過(guò)程便于在計(jì)算機(jī)上通過(guò)編程實(shí)現(xiàn)。由此證明基于模糊Petri網(wǎng)的故障診斷是一種行之有效的方法。
[1]吳哲輝.Petri 網(wǎng)導(dǎo)論[M].北京:機(jī)械工業(yè)出版社,2006.
[2]丁軍,張志華,周學(xué)智.模糊Petri 網(wǎng)在指火控系統(tǒng)故障診斷中的應(yīng)用[J]. 情報(bào)指揮控制系統(tǒng)與仿真技術(shù),2005,27(3):48-52.
[3]袁崇義.Petri 網(wǎng)原理與應(yīng)用[M].南京:電子工業(yè)出版社,2005.
[4]王俊國(guó),閔松,趙金,等.基于模糊Petri 網(wǎng)的故障診斷方法[J].兵工自動(dòng)化,2002,21(6),18-21.
[5]李萬(wàn),王學(xué)軍,黃善文.模糊Petri 網(wǎng)在某型艦炮系統(tǒng)故障診斷中的應(yīng)用[J].船海工程,2010,39(5):219-221.
[6]楊其宇,張霞.模糊Petri 網(wǎng)故障診斷技術(shù)應(yīng)用[J].兵工自動(dòng)化,2006,25(4):73-74.
[7]戎梅,趙廷弟,郭江杰.模糊Petri 網(wǎng)在航天發(fā)射系統(tǒng)故障診斷中的應(yīng)用研究[J]. 航天控制,2009,27(4):82-87.
[8]黃玉燕,詹素華.故障診斷的模糊Petri 網(wǎng)模型[J].集美大學(xué)學(xué)報(bào):自然科學(xué)版,2002,7(3):237-241.
猜你喜歡
小獼猴智力畫(huà)刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(bào)(哲學(xué)社會(huì)科學(xué)版)(2016年9期)2017-01-15 13:52:02
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
