一種基于卡爾曼濾波的壓縮跟蹤算法研究
2014-06-05 15:27:41孫少軍李惠宋華軍
山東科學 2014年5期
孫少軍,李惠,宋華軍
(1.91404部隊裝備部測靶科,河北 秦皇島 066001;2.山東科技大學電子通信與物理學院,山東 青島 266510;3.中國石油大學(華東)信息與控制工程學院,山東 東營 257061)
一種基于卡爾曼濾波的壓縮跟蹤算法研究
孫少軍1,李惠2*,宋華軍3
(1.91404部隊裝備部測靶科,河北 秦皇島 066001;2.山東科技大學電子通信與物理學院,山東 青島 266510;3.中國石油大學(華東)信息與控制工程學院,山東 東營 257061)
根據(jù)道路交通監(jiān)控視頻的特點,采用壓縮跟蹤(CT)算法進行運動車輛的檢測與跟蹤。在攝像頭變化較大、運動車輛尺度變化和背景變化等情況下,CT算法均具有很強的魯棒性。但是當車輛被遮擋時,跟蹤算法容易失效。為了解決這一問題,提出使用卡爾曼濾波對遮擋的車輛進行軌跡預測。卡爾曼濾波能根據(jù)CT算法跟蹤目標的軌跡,有效地預測目標遮擋時的軌跡。實驗結果表明,本算法不但可以較好地處理跟蹤車輛尺寸變化的問題,在車輛丟失或被部分遮擋時,能準確而穩(wěn)定地跟蹤車輛,而且具有很好的實時性,滿足了工程應用的需求。
壓縮跟蹤算法;實時跟蹤;目標檢測;卡爾曼濾波
在視頻圖像處理中,道路交通監(jiān)控視頻較為特殊,由于攝像頭運動角度的變化,車輛和背景的運動比較復雜。傳統(tǒng)的方法可以進行車輛的提取,但是實時性不高。近些年來,模式識別和分類技術用于車輛的提取與跟蹤獲得較多成果[1-4]。其主要思想是從當前幀中提取圖像特征,依據(jù)該特征更新分類器。分類器的任務是將提取的特征進行分類,一類屬于車輛,一類屬于背景,進而達到背景去除的目的[5-6]。
視頻的目標跟蹤方法有很多種,傳統(tǒng)的算法有相關跟蹤算法和重心跟蹤算法,這些算法適合背景單一的情況下的目標跟蹤。而近年來提出了很多種有效的目標跟蹤算法,Babenko等[7]提出了一種新穎的更新自適應外觀模型的跟蹤系統(tǒng),利用多實例學習(multiple instance learning,MIL)而不是傳統(tǒng)的監(jiān)督學習方法,解決了傳統(tǒng)分類器由于部分遮擋和外觀變化引起的漂移問題。但是,當目標被完全遮擋很長時間或目標完全離開視場時,任何利用自適應外觀模型的跟蹤器也將不可避免地對不正確的實例進行學習,從而丟失跟蹤目標。Felzenszwalb等[8-9]描述了一種基于多尺度和可變形部件的目標檢測模型,該模型采用判別方法訓練得到。雖然光照變化、觀察視角的不同以及目標旋轉尺度變化對文獻提出的方法影響不大,但檢測速度相對較慢,不能達到實時處理的要求。Mei等[10]提出基于模型特征的車輛檢測與跟蹤算法,其主要分為兩類:產(chǎn)生式算法(generative algorithm)[11-12]和判別式算法(discriminative algorithm)[13]。產(chǎn)生式算法通過典型的學習模型來表示車輛物體,然后使用這個模型,以最少的重建誤差搜索圖像的邊界。判別式算法把檢測與跟蹤問題變成二值分類任務,該分類器能夠確定車輛和背景的邊界,進而把車輛從背景中分離出來。本文使用的壓縮跟蹤(compressive tracking,CT)算法對目標的旋轉、縮放和亮度變化等具有較高的魯棒性,但是當目標被遮擋的時候,CT算法不能跟蹤目標。針對這一缺陷,使用卡爾曼濾波完成目標被遮擋的時候的軌跡預測,當目標被遮擋的時候,卡爾曼濾波預測目標的位置,目標重新出現(xiàn)后,繼續(xù)使用CT算法跟蹤目標。
1 CT算法
CT算法[14-15]屬于判別式算法,通過隨機投影將高維信號變?yōu)榈途S空間的圖像特征進行處理,降低了算法的時間復雜度。算法的流程圖如圖1所示。
1.1 隨機投影

其中n<m,在理想狀態(tài)下,R可以保留原始信號所有部分的信息Achlioptas[16]證明了如果向量中的點投影到隨機選擇的子空間中,那么在高維向量空間中點的距離能夠被保存。Baraniuk等[17]證明了壓縮感知中的隨機矩陣滿足Achlioptas提到的RIP(restrictedisometry property)條件由此可以得到,如果X是可壓縮的,就能以最小的誤差和較大的成功概率從V中重建X。同時V中含有X幾乎全部的信息。這樣,隨機投影矩陣是存在的,并且其低維特性也可以用于實時跟蹤[17]。

圖1 壓縮算法的流程圖Fig.1 Flowchart of the CT algorithm
1.2 隨機測量矩陣
一個典型的滿足RIP條件的隨機測量矩陣是隨機高斯矩陣,矩陣中的元素服從正態(tài)分布。當m很大時,矩陣中非零元素比較多,計算機的存儲量和計算量都會增加,滿足不了實時性。在本文中,定義的隨機測量矩陣為

其中,ri,j為隨機測量矩陣元素。當s=2或者3時,矩陣均滿足RIP條件,而且容易計算,僅需要一個均勻的隨機數(shù)產(chǎn)生器。特別是當s=3時,矩陣已經(jīng)非常稀疏,三分之二的計算量可以避免。
1.3 高效降維處理


其中,i和j分別表示矩形濾波器的寬度和高度。然后將濾波后的圖像變成一個w×h維的列向量,再把該向量處理成為高維多尺度圖像特征向量X=(x1,…,xm)T,其中,m=(wh)2,維數(shù)一般在106~1010。當采用隨機矩陣R把X投影到低維空間的V向量時,隨機矩陣R只需要計算一次,然后在整個計算過程中保持定值。根據(jù)非零元素在矩陣中的位置,在隨機矩陣R中存儲這些元素和輸入圖像中矩形濾波器的位置,就能以積分圖的形式有效計算出V,從而能夠采用稀疏的方法得到矩形的特征。
1.4 低維壓縮特征分析
低維特征向量V中每一個元素vi是矩形空間不同尺度分布特征的線性組合。由于隨機測量矩陣的系數(shù)可正可負,所以可以采用計算廣義Haar-like特征的方法計算壓縮特征的相關灰度差。Haar-like特征已經(jīng)廣泛應用于車輛檢測中,根據(jù)不同的目的和任務,Haar-like特征可以設計成不同的形式,但是計算量也比較大,選擇重要特征的提升算法可以解決此類問題。Babenko[4]采用廣義的Haar-like特征,每一個特征都是隨機產(chǎn)生的矩形特征的線性組合,并使用在線提升算法為車輛跟蹤選擇其中的一小部分。在本文中,隨機測量矩陣實現(xiàn)了對Haar-like特征的壓縮,而且壓縮感知理論也確保了算法中選擇的特征能夠保留原始圖像中幾乎所有的信息。因此,可以在低維的壓縮域中,簡捷高效地實現(xiàn)對投影特征的分類處理,避免了高維計算量大的問題。
1.5 分類器的重建與更新

式中,假設先驗概率p(y=1)=p(y=0),y只有兩種取值情況,代表樣本標簽。其中y=1代表正樣本,y=0代表負樣本。Diaconis等[18]表明高維隨機向量的投影大部分情況下是滿足高斯分布的。分類器中的條件概率p(vi|y=1)和p(vi|y=0)服從4個參數(shù)的高斯分布,即

這4個參數(shù)的更新公式為


式中,λ代表學習參數(shù),規(guī)定λ>0。均值和方差的公式為


兩式可通過極大似然估計得到。
樣本集更新分類器依據(jù)

其中,Dα和Dζβ代表兩個圖像塊,It代表第t幀圖像。
2 處理車輛跟蹤丟失的卡爾曼濾波算法
在車輛丟失或被遮擋時,采用卡爾曼濾波對車輛運動軌跡進行預測。卡爾曼濾波[19]是一種最優(yōu)化自回歸數(shù)據(jù)處理算法(optimal recursive data processing algorithm),是一個對動態(tài)系統(tǒng)的狀態(tài)序列進行線性最小方差誤差估計的算法。它以動態(tài)的狀態(tài)方程和觀測方程來描述系統(tǒng),具有無偏、穩(wěn)定和最優(yōu)的特點,并且算法計算量小,是一種處理車輛跟蹤軌跡預測很好的工具。
假定系統(tǒng)是線性離散系統(tǒng),系統(tǒng)和測量中的噪聲是高斯白噪聲,系統(tǒng)用一個線性隨機狀態(tài)方程和觀測方程表示

式中,X(k)表示k時刻的系統(tǒng)狀態(tài),Z(k)表示時刻的測量值,A、B為狀態(tài)參數(shù),H為測量參數(shù),U(k)為控制量輸入,W(k)、V(k)分別表示過程噪聲和測量噪聲。
在車輛跟蹤的過程中,雖然車輛是快速運動的,但是相對于每秒25幀PAL制視頻來說,相鄰兩幀之間車輛變化非常小,因此可以將系統(tǒng)設置為勻速運動模型,對X、Y坐標分別進行卡爾曼濾波預測,這樣也可以減少運算量,它們的測量矩陣為HT=[1 0],狀態(tài)方程可寫為

卡爾曼濾波一些初始參數(shù)可以隨意設定,協(xié)方差初始值設置盡量大些,在車輛跟蹤過程中,這些參數(shù)可以向最優(yōu)的方向變化。

圖2 車輛跟蹤過程流程圖Fig.2 Flowchart of vehicle tracking process
3 基于卡爾曼濾波的CT算法
當車輛被遮擋時,CT算法跟蹤的車輛容易丟失,而利用卡爾曼濾波算法對跟蹤車輛進行軌跡預測,預測到新的位置后,在新位置的局部區(qū)域進行搜索,當重新搜索到車輛后,結束卡爾曼軌跡預測過程,轉入到CT算法車輛跟蹤過程。兩種算法相結合的車輛跟蹤過程流程如圖2所示。
4 實驗結果及分析
實驗中用到的攝像機為紅外高清相機,每秒30幀,分辨率為1920×1080;測試所用計算機為3.4 GHz主頻、4 G內存。當給定當前幀中車輛的位置后,算法會在車輛周圍以圓的形式搜索獲取正樣本。在本文中,將產(chǎn)生45個正樣本和50個負樣本,在降維的過程中,投影空間的維度設置在50,學習參數(shù)λ設置為0.85(這兩個參數(shù)針對不同的跟蹤對象和背景是不同的,在我們測試視頻中根據(jù)經(jīng)驗設置)。
圖3是攝像頭的變化過程的跟蹤效果,攝像頭轉動不僅導致圖像模糊,而且容易造成車輛提取的失敗。從圖3b可見,CT算法在攝像頭突變的情況下仍能有效跟蹤車輛。
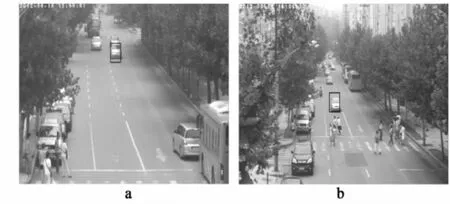
圖3 攝像頭運動時的提取效果Fig.3 Tracking effect of amotion camera
車輛被遮擋時算法的跟蹤效果如圖4所示,選中的車輛在第171幀時開始被遮擋,同時在車輛的后方出現(xiàn)了與其外觀相同的車輛;目標被遮擋,CT跟蹤算法失效,啟動卡爾曼濾波預測目標的位置,如圖4e所示,車輛在第258幀時又開始擺脫遮擋。

圖4 車輛被遮擋的跟蹤Fig.4 Tracking effect of a sheltered vehicle
5 結 論
通過改變窗口大小和位置坐標,兩種情況下的跟蹤誤差曲線圖都能很快收斂,說明該算法具有很強的魯棒性,而且誤差較小。CT算法能在背景變化比較大的情況下跟蹤車輛而不會引起較大的偏離,表現(xiàn)出很強的魯棒性,運行速度較快。該結果說明,從高維信號中提取的特征投射到低維空間是可行的,而且是有效的。針對遮擋的時候目標容易丟失,提出結合卡爾曼濾波的算法預測目標的位置。提出的算法在汽車尺度變化較大的時候,仍然不能有效地跟蹤目標,后續(xù)需要針對尺度跟蹤的問題進行研究。
[1]AVIDAN S.Support vector tracking[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2004,26(8):1064-1072.
[2]BLACK M J,JEPSON A D.EigenTracking:Robustmatching andtracking of articulatedobjects using a view-basedrepresentations[J].International Journal of Computer Vision,1998,26(1):63-84.
[3]GRABNER H,GRABNER M,BISCHOF H.Real-time tracking via online boosting[J].BMVC06,2006,1:47-56.
[4]BABENKO B,YANGM H,BOLONGIES.Robustobject trackingwith onlinemultiple instance learning[J].IEEE Transactions onPattern Analysis and Machine Intelligence,2011,33(8):1619-1632.
[5]詹群峰.基于opencv的視頻道路車輛檢測與跟蹤[D].廈門:廈門大學,2009.
[6]劉振華.運動場景中目標檢測與跟蹤技術研究[D].南京:南京航空航天大學,2008.
[7]BABENKO B,YANGM H,BELONGIES.Visual tracking with onlinemultiple instance learning[EB/OL].[2013-11-20]. http://www.docin.com/p-270052250.html
[8]FELZENSZWALBP,McALLESTER D,RAMANAN D.A discriminatively trained,multiscale,deformable partmodel[J].IEEE Conference on Computer Vision andPattern Recognition,2008.Piscataway,US:IEEE,2008:1-8.
[9]FELZENSZWALB P F,GIRSHICK R B,MCALLESTER D,et al.Object detection with discriminatively trainedpart-basedmodels[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2010,32(9):1627-1645.
[10]MEIX,LING H.Robust visual tracking andvehicle classification via sparse representation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2011,33(11):2259-2272.
[11]ROSSD A,LIM J,LIN R,etal.Incremental learning for robust visual tracking[J].International Journal of Computer Vision,2008,77(1/2/3):125-141.
[12]LIH,SHEN C,SHIQ.Real-time Visual Tracking using Compressive Sensing[J].2011 IEEE Conference on Computer Vision andPattern Recognition,2011:1305-1312.
[13]COLLINSR,LIU Y,LEORDEANU M.Online selection of discriminative tracking features[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27(10):1064-1072.
[14]ZHANG K H,ZHANG L,YANGM H.Real-time compressive tracking[M]//Computer Vision.ECCV,2012:864-877.
[15]朱秋平,顏佳,張虎,等.基于壓縮感知的多特征實時跟蹤[J].光學精密工程,2013,21(2):437-443.
[16]ACHLIOPTASD.Database-friendly randomprojections:Johnson-Lindenstrauss with binary coins[J].Journal of computer and System Sciences,2003,66(4):671-687.
[17]BARANIUK R,DAVENPORTM,DeVORE R,et al.A simple proof of the rectrictedisometry property for randommatrices[J]. Constr Approx,2008,28(3):253-263.
[18]DIACONISP,F(xiàn)REEDMAN D.Asymptotics of Graphical Projection Pursuit[J].Ann Stat,1984,12(3):793-815.
[19]KALMAN R E.A new approach to linear filtering andprediction problems[J].Journal of basic Engineering,1960,82(1):35-45.
Compressive tracking algorithm based on Kalman filter
SUN Shao-jun1,LI Hui2*,SONG Hua-jun3
(1.Target Section of Equipment Department,Troop 91404,Qinhuangdao 066001,China;2.School of Electronics,Communication and Physics,Shandong University of Science and Technology,Qingdao 266510,China;3.School of Information and Control Engineering,China University of Petroleum(East China),Dongying 257061,China)
We employ compressive tracking(CT)algorithmto detect and track motion cars basedon the charac teristics of traffic monitoring video.The algorithmhas strong robustness for greater camera change,motion vehicles scale change,and backg roundchange.However,the algorithmis easy tofail when a vehicle is sheltered.We therefore present a Kalman filter basedmodified CT algorithmto predict the motion trailof a shelteredvehicle.Kalman filter can track the trail of a target with CT algorithm,and effec tively predict the trail of a shelteredtarget.Experimental results show that the algorithmcan not only better solve the issue of motion vehicles scale change-precisely and stably track a vehicle when it disap pears or is partly sheltered-,but also has better real-time performance.It thus satis fies the requirements of engineering application.
compressive tracking algorithm;real-tim e tracking;target detec tion;Kalm an filter
TP391.41
A
1002-4026(2014)05-0054-06
10.3976/j.issn.1002-4026.2014.05.010
2014-01-13
國家自然科學基金(61305012);中央高校基本科研業(yè)務費專項資金(12CX04064A)
孫少軍(1976-),男,學士,工程師,研究方向為車輛跟蹤、雷達信號處理。
*通訊作者。Email:lh1816@163.com
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
數(shù)學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28