蝶閥煤氣調(diào)節(jié)系統(tǒng)增量式模糊PID控制器的動(dòng)態(tài)特性研究
2014-06-05 15:27:41王志冉祥濤
山東科學(xué) 2014年5期
關(guān)鍵詞:系統(tǒng)
王志,冉祥濤
(山東省海洋環(huán)境監(jiān)測(cè)技術(shù)重點(diǎn)實(shí)驗(yàn)室,山東省科學(xué)院海洋儀器儀表研究所,山東 青島 266001)
蝶閥煤氣調(diào)節(jié)系統(tǒng)增量式模糊PID控制器的動(dòng)態(tài)特性研究
王志,冉祥濤
(山東省海洋環(huán)境監(jiān)測(cè)技術(shù)重點(diǎn)實(shí)驗(yàn)室,山東省科學(xué)院海洋儀器儀表研究所,山東 青島 266001)
為實(shí)現(xiàn)鋼廠循環(huán)發(fā)電過程中對(duì)混合煤氣的穩(wěn)壓控制,設(shè)計(jì)了應(yīng)用于蝶閥壓力調(diào)節(jié)系統(tǒng)的增量式模糊PID控制器,在MATLAB/Simulink環(huán)境下進(jìn)行了動(dòng)態(tài)特性仿真,并與常規(guī)PID仿真進(jìn)行了對(duì)比分析。結(jié)果表明,模糊PID控制能夠使該調(diào)節(jié)系統(tǒng)具有良好的動(dòng)態(tài)特性,滿足穩(wěn)壓系統(tǒng)的控制要求。
蝶閥;模糊PID;動(dòng)態(tài)特性;仿真
鋼廠循環(huán)發(fā)電過程中,送往燃?xì)廨啓C(jī)的混合煤氣氣壓有一個(gè)正常工作范圍[1],為了實(shí)現(xiàn)對(duì)管道中混合煤氣壓力的調(diào)節(jié),使循環(huán)發(fā)電系統(tǒng)穩(wěn)定工作,本文設(shè)計(jì)了一套蝶閥壓力調(diào)節(jié)系統(tǒng)。混合煤氣管道系統(tǒng)是一個(gè)擾動(dòng)劇烈、非線性強(qiáng)且壓力調(diào)節(jié)滯后較大的系統(tǒng),常規(guī)PID控制器結(jié)構(gòu)簡(jiǎn)單,其控制參數(shù)是在某一特定條件下整定完成的,不具有在線整定參數(shù)的能力,難以達(dá)到理想的穩(wěn)壓控制要求。將智能控制領(lǐng)域的模糊控制和常規(guī)PID控制相結(jié)合的增量式模糊PID控制,可以實(shí)現(xiàn)對(duì)PID參數(shù)的在線調(diào)整[2-4],從而快速地對(duì)壓力波動(dòng)做出調(diào)節(jié)。本文針對(duì)鋼廠循環(huán)發(fā)電過程中壓力調(diào)節(jié)系統(tǒng)的工作要求,設(shè)計(jì)了增量式模糊PID控制器,并在MATLAB/Simulink環(huán)境下進(jìn)行了動(dòng)態(tài)特性仿真。
1 蝶閥調(diào)節(jié)系統(tǒng)簡(jiǎn)介
本蝶閥調(diào)節(jié)系統(tǒng)包括控制器、步進(jìn)電機(jī)、雙向定量齒輪泵、雙螺旋擺動(dòng)油缸、蝶閥以及其他液壓附件(液壓管、液壓鎖等)。
蝶閥調(diào)節(jié)系統(tǒng)的工作原理如圖1所示。步進(jìn)電機(jī)接收控制器發(fā)出的信號(hào),驅(qū)動(dòng)雙向齒輪泵正(反)轉(zhuǎn)供油,液壓油經(jīng)管道,驅(qū)動(dòng)擺動(dòng)油缸輸出螺桿的正向(反向)回轉(zhuǎn),輸出螺桿與蝶閥的閥桿相固聯(lián),從而帶動(dòng)蝶閥閥桿回轉(zhuǎn),調(diào)整蝶閥的開度,在蝶閥出口管道裝有壓力傳感器,控制器通過對(duì)人工設(shè)定的壓力信號(hào)和反饋信號(hào)進(jìn)行分析,輸出控制信號(hào)驅(qū)動(dòng)電機(jī)動(dòng)作,最終實(shí)現(xiàn)對(duì)閥后管道中流體的穩(wěn)壓控制。

圖1 蝶閥調(diào)節(jié)系統(tǒng)原理圖Fig.1 Schematic of the butterfly valve control system
2 模糊PID控制器原理
本蝶閥調(diào)節(jié)系統(tǒng)的模糊PID控制器結(jié)構(gòu)如圖2所示。模糊器采用兩輸入三輸出的形式,以反饋信號(hào)與設(shè)定信號(hào)的偏差量e以及偏差的變化率ec作為輸入語(yǔ)言變量,以PID參數(shù)的變化量ΔKp、ΔKi、ΔKd作為輸出語(yǔ)言變量[5]。
e、ec、ΔKp、ΔKi、ΔKd的模糊集均定義為:{NB,NM,NS,Z,PS,PM,PB},分別代表負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大。輸入輸出變量的模糊論域取為[-6,6],均采用三角形隸屬度函數(shù)。模糊規(guī)則由專家經(jīng)驗(yàn)得出,模糊推理采用重心法。

圖2 模糊PID控制原理圖Fig.2 Schematic of fuzzy-PID controller
3 系統(tǒng)建模
整個(gè)蝶閥壓力調(diào)節(jié)系統(tǒng)主要包括步進(jìn)電機(jī)系統(tǒng)、泵控缸系統(tǒng)以及蝶閥三個(gè)子系統(tǒng),下面分別對(duì)各個(gè)子系統(tǒng)進(jìn)行建模。
3.1 步進(jìn)電機(jī)系統(tǒng)
控制系統(tǒng)采用步進(jìn)電機(jī)作為執(zhí)行電機(jī),考慮到步進(jìn)電機(jī)的定位精度很高,認(rèn)為這一環(huán)節(jié)為比例環(huán)節(jié)[6]

式中,φ為步進(jìn)電機(jī)旋轉(zhuǎn)的角度;Δθ為電機(jī)步距角;N為輸入脈沖個(gè)數(shù)。
3.2 泵控缸系統(tǒng)
采用雙向定量齒輪泵驅(qū)動(dòng),雙螺旋擺動(dòng)油缸作為執(zhí)行元件,假設(shè)油液的體積彈性模量為定值,忽略管道壓力損失、流體質(zhì)量效應(yīng)和管道動(dòng)態(tài)的影響,螺旋缸輸出螺桿角位移的傳遞函數(shù)為[7-9]


3.3 蝶閥
對(duì)于氣體,根據(jù)流體連續(xù)性方程和伯努利方程可得蝶閥的流量特性方程[10]

式中,β為氣體膨脹系數(shù),也稱壓縮修正系數(shù);Ks為蝶閥的結(jié)構(gòu)常數(shù);Kv為蝶閥的流量特性系數(shù);D為蝶閥的公稱直徑;ρ為氣體的密度;P1為蝶閥出口處的氣體壓力;P0為蝶閥入口處的氣體壓力。
等效流量Qs=Q/β,在實(shí)際過程中,由于氣體的可壓縮性,系統(tǒng)輸出不能實(shí)時(shí)體現(xiàn)輸入,因此根據(jù)系統(tǒng)特點(diǎn)在仿真過程中將等效流量環(huán)節(jié)簡(jiǎn)化為慣性環(huán)節(jié)。根據(jù)所選蝶閥樣本,蝶閥的流量特性曲線近似為等百分比流量特性曲線,即Kv=Rα-1,R為蝶閥的可調(diào)比[11],并對(duì)式(3)進(jìn)行拉普拉斯變換可得

式中,ΔP=P0-P1。
4 MATLAB/Simulink仿真與分析
在MATLAB/Simulink環(huán)境下建立如圖3所示的仿真模型。步進(jìn)電機(jī)采用時(shí)代超群公司的86BYG250-65,其步距角為1.8°;齒輪泵選用0.49 mL排量的雙向齒輪泵,擺動(dòng)缸選用BDA-H內(nèi)徑為63 mm的螺旋擺動(dòng)缸,閥體選用DN50的蝶閥。氣體介質(zhì)根據(jù)實(shí)驗(yàn)室條件由空壓機(jī)提供,入口壓力的波動(dòng)變化視為階躍擾動(dòng),取入口壓力為3.0 MPa,出口壓力設(shè)定值為2.3 MPa。

圖3 Simulink仿真模型圖Fig.3 Simulation model with simulink
圖4為常規(guī)PID與模糊PID控制下的系統(tǒng)階躍響應(yīng)曲線,圖5為傳統(tǒng)PID控制時(shí)的方波跟蹤響應(yīng)曲線,圖6為模糊PID控制時(shí)的方波跟蹤響應(yīng)曲線。由圖4可知,在允許的調(diào)節(jié)誤差范圍(2.3±0.05)內(nèi)[12-13],采用常規(guī)PID控制時(shí),系統(tǒng)的超調(diào)量為32.5%,調(diào)節(jié)時(shí)間為8.26 s;而采用模糊PID控制時(shí),系統(tǒng)的超調(diào)量為12%,調(diào)節(jié)時(shí)間為4.67 s,超調(diào)量以及調(diào)節(jié)時(shí)間都有明顯減小,且有效地避免了系統(tǒng)震蕩。由圖5和圖6可知,模糊PID調(diào)節(jié)下的控制系統(tǒng)具有更好的跟蹤性能,能夠滿足穩(wěn)壓系統(tǒng)的控制要求。

圖4 階躍響應(yīng)曲線Fig.4 Response curve of step input

圖5 PID控制方波響應(yīng)曲線Fig.5 Response curve of PID square wave
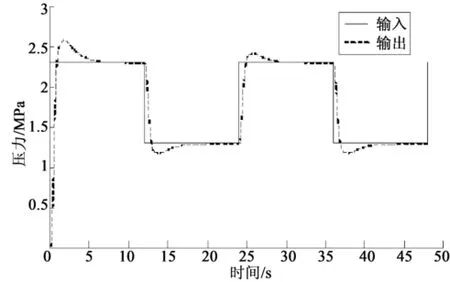
圖6 模糊PID控制方波響應(yīng)曲線Fig.6 Response curve of fuzzy PID square wave
5 結(jié)論
本文基于鋼廠循環(huán)發(fā)電中混合煤氣的蝶閥穩(wěn)壓控制系統(tǒng),研究了增量式模糊PID控制器的動(dòng)態(tài)特性。在MATLAB/Simulink環(huán)境下對(duì)本調(diào)節(jié)系統(tǒng)進(jìn)行了動(dòng)態(tài)特性仿真。結(jié)果表明,與常規(guī)的PID控制相比較,增量式模糊PID控制時(shí),控制系統(tǒng)的超調(diào)量以及調(diào)節(jié)時(shí)間都有明顯減小并且具有更優(yōu)秀的跟蹤性能,滿足穩(wěn)壓系統(tǒng)的要求。
[1]王勇,謝玉東.大流量管道煤氣的控制技術(shù)研究[J].山東大學(xué)學(xué)報(bào):工學(xué)版.2009,39(2):70-74.
[2]韓成浩,趙丁選.基于自整定模糊PID控制算法的電液伺服系統(tǒng)設(shè)計(jì)[J].制造業(yè)自動(dòng)化,2012,34(4):11-14.
[3]邢峰,張讓輝,王敦富,等.模糊PID控制仿真與實(shí)驗(yàn)研究[J].機(jī)床與液壓,2012,40(10):147-149.
[4]翟旭升,謝壽生,楊偉,等.基于自適應(yīng)模糊PID控制的恒壓供氣系統(tǒng)[J].液壓與氣動(dòng),2008(2):21-23.
[5]黃偉,巫茜.基于參數(shù)自整定的模糊PID控制器及其應(yīng)用[J].機(jī)床與液壓,2013,41(6):81-86.
[6]郜立煥,褚金利,周剛,等.一種數(shù)字式多路換向閥及其PLC控制[J].蘭州理工大學(xué)學(xué)報(bào),2005,31(4):55-57.
[7]郭建宇.無閥電液伺服系統(tǒng)的建模與仿真研究[D].大連:大連理工大學(xué),2005.
[8]姜繼海,涂婉麗,曹健.直驅(qū)式容積控制電液伺服系統(tǒng)動(dòng)態(tài)性能研究[J].液壓與氣動(dòng).2005(8):29-32.
[9]侯艷艷,曹克強(qiáng),胡良謀,等.采用遺傳PID整定的電液伺服系統(tǒng)仿真研究[J].現(xiàn)代制造工程.2012(5):74-77.
[10]范邦達(dá).蝶閥流量特性系數(shù)[J].流體機(jī)械,1985(11):25-28.
[11]章威軍.線性調(diào)節(jié)蝶閥的研究[D].浙江:浙江大學(xué),2008.
[12]熊俊.混合煤氣管道輸送壓力電液調(diào)節(jié)閥控制技術(shù)研究[D].濟(jì)南:山東大學(xué),2010.
[13]許茂林.直驅(qū)式電液調(diào)節(jié)閥穩(wěn)壓控制技術(shù)研究[D].濟(jì)南:山東大學(xué),2012.
Dynamic characteristics of incremental fuzzy PID of butterfly valve gas regulating system
WANG Zhi,RAN Xiang-tao
(Shandong Provincial Key Labo ratory of Ocean Environmental Monitoring Technology,Institute of Oceanographic Instrumentation,Shandong Academy of Sciences,Qingdao 266001,China)
We designedan inc remental fuzzy PID controller ap plicable to butterfly valve pressure regulating systemto stabilize pressure control of mixedgas in recyc ling power generation of steel fac tory.Dynamic charac teristics simulation was conduc tedw ith MATLAB/Simulink,which were comparedw ith traditional PID.Results show that the controller can achieve better dynamic charac teristics and satisfy control requirement for a stable controller.
butterfly valve;fuzzy PID;dynam ic charac teristics;simulation
TP137
A
1002-4026(2014)05-0042-04
10.3976/j.issn.1002-4026.2014.05.008
2014-03-23
王志(1988-),男,碩士,研究方向?yàn)橄到y(tǒng)智能控制與監(jiān)測(cè)。Email:sduwangzhi@163.com
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32