十字架式高速伺服分瓶器的研究開發
2014-04-21 06:49:30楊曉紅賈香芝
機械工程師 2014年2期
楊曉紅, 賈香芝
(廣州市萬世德包裝機械有限公司,廣州510800)
0 引言
大部分瓶裝物在出廠前需要進行二次包裝,二次包裝最初開發是用來保護產品,或使它更加容易地將一些產品包裝在一起。這些特點今天依然對包裝產業很重要。通常,二次包裝本身就成為一個銷售單元,目前,在飲料、酒類、石化、食用油、食品的多數產品采用三大類型的二次包裝:紙箱、收縮膜包裝和塑料箱。但無論哪種型式的包裝,都需要把集中輸送的瓶子分成組,在成組之前的進瓶至關重要。對于標準的圓形瓶進瓶目前來看沒有多大障礙,但異形瓶進瓶便會產生堵瓶、卡滯現象,嚴重影響生產效率。為了解決這個難題,2009年開發出了第一代分瓶器,此機器框架上設有輸送帶,框架內位于輸送帶輸出端的一側設有移動隔板,用于將輸送過來的瓶裝物分成所需要的排數,移動隔板上有止瓶星輪計數和讓瓶子短暫停止以便分排。實現分排和分列輸送,因為本機是間歇運動,不能實現連續輸送,這種分瓶機在低速生產線上可能很好地實現本機功能,但隨著時代的進步,越來越多的高速生產線出現了,為了適應高速生產線,在原來機器的基礎上,開發出第二代分瓶器——龍門架式分瓶器(發明專利號為ZL 2010 1 0266725.7),這種分瓶器在現場使用效果很好,它用了3個電缸和3套伺服電機及控制器(其中1套用在輸送鏈上進行調速),但因整體機架占用空間面積較大,且制造成本很高,一般中小客戶不能承受。為了更好地使本產品推廣應用,考慮到可靠性和經濟性,又開發了第三代分瓶器——十字架式高速伺服分瓶器,對設備結構和性能進行了優化設計。
1 機器構成
高速伺服分道器由框架、前端固定隔板、中間隔板組件、X軸伺服驅動裝置、Y軸伺服驅動裝置、擺動隔板組件、進瓶隔板組件、導向板組件、輸送鏈組件、電柜控制系統等構成,見圖1。
2 工作原理
輸送鏈高速輸送來的瓶子從進瓶隔板進入,通過導向板組件到擺動隔板組件,X軸伺服驅動裝置上伺服電機驅動絲杠式驅動軸向前加速運動,當輸送鏈輸送瓶子的速度跟中間隔板和Y軸伺服驅動裝置的運動速度同步時,Y軸伺服驅動裝置上的絲杠式驅動軸驅動擺動隔板沿Y軸移動一個瓶子寬度的距離,達到分瓶目的。此時,X軸伺服驅動裝置上的伺服電機減速,瓶子繼續輸送,前面的計數光電計瓶達到設定值,X軸伺服驅動裝置帶動Y軸伺服驅動裝置和擺動隔板組件向X進瓶的反方向運行,完成一個循環。
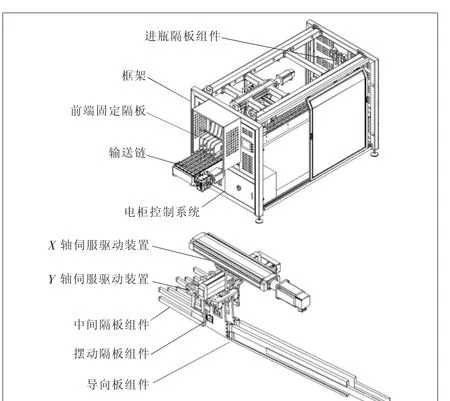
圖1 高速伺服分道器結構
單排輸送進來的瓶子,根據包裝形式的不同,出瓶時可以分三道、四道,最多可以分成八道,在機器上只增減分隔板就可實現不同的分道。
設輸送鏈的的速度為V,X軸方向的電缸速度為V1,Y 軸方向的電缸速度為 V2,瓶子大小為( 長×寬)=b×a,瓶子進瓶方向如圖2所示。
當計數器所數瓶子達到額定值(假定為20)后,為防止卡瓶,分道的最佳位置如圖2所示。
此時,V1方向電缸的動作可分為4階段:1)加速階段。V1從0加速到V,所需時間為t1,加速度為a1,隔板前進了S1,在此時間里,輸送鏈前進了S;2)勻速階段。V1=V,分道動作在此階段完成;3)減速階段。V1從V減到0;4)返回原點。
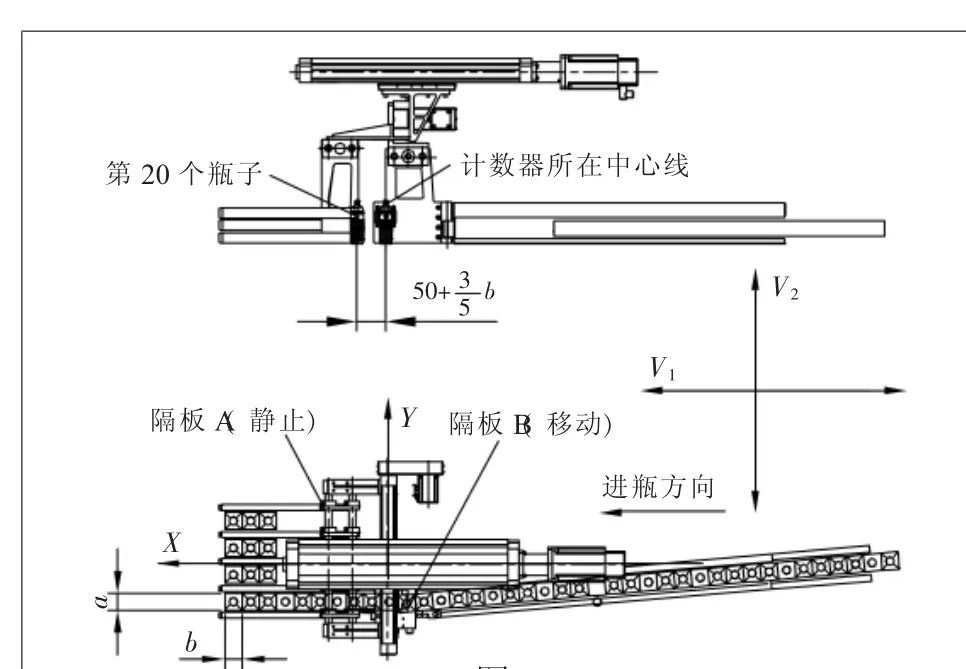
圖2
為了使瓶子在V1加速完成后瓶子剛好達到圖3的位置,有以下經驗關系式:S-S1=50+3b/5。
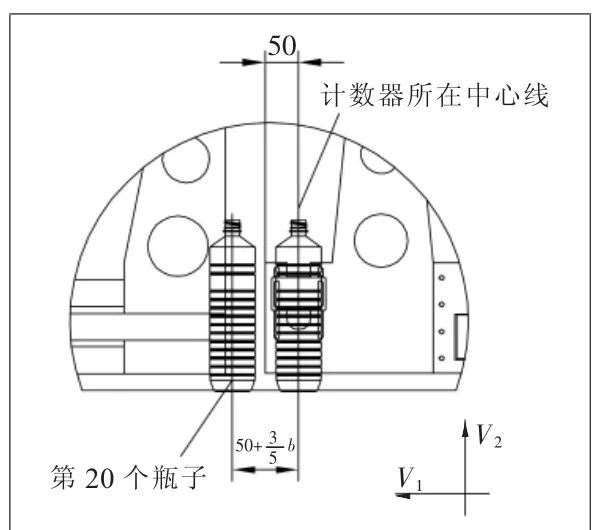
圖3
3 整體結構及方案配置
為了既減輕質量又確保整體結構的強度與剛度,分道器主體框架的材料主要采用碳鋼烤漆制成,分道板和支撐運動模塊的支架全部采用鋁合金表面陽極化處理制成。
十字架式分道器整體配置如圖4,輸送鏈電機減速器上連接的編碼器跟蹤輸送鏈的線速度,也就是瓶子的運動速度,當X軸從0速開始加速追蹤輸送鏈的線速度進入等速階段,運動控制器輸入變道信號,Y軸收到變道信號后,在等速段結束前完成變道,X軸開始減速,X軸的運動行程最大為400 mm。
加速度 a1可根據輸送鏈速度做出適當調整,保證整機運行平穩,分道時整機振動小,以減少倒瓶卡瓶的可能性。
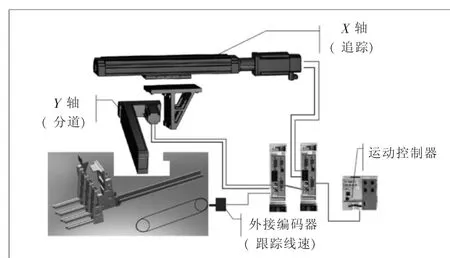
圖4
3.1 X軸運動規律及結構
X軸負責帶動整個分道機構在流水線方向前后運動,完成追蹤線速度的工作。X軸方向折合負載約為80 kg,有效運動行程為400 mm,預定線速為720 mm/s,完成單向追蹤的時間約為0.70 s,結構及運動規律如圖5所示。
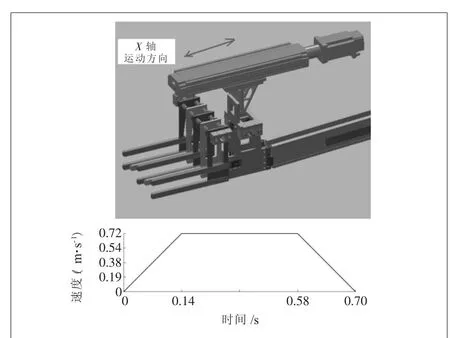
圖5
為實現跟蹤速度準確,加減速時運動平穩,選用進口某知名品牌的滾珠絲杠式集成運動模塊,伺服電機直接驅動滾珠絲杠方式代替了以往由伺服電機通過減速器驅動同步皮帶運動方式,結構更加合理。而且也只用一個運動集成模塊代替了以往2個平行安裝的同步帶式電缸,使機器整體布局大大縮小,節約了成本,滾珠絲杠的高精度、高強度使運動更加平穩可靠。
3.2 Y軸運動規律及結構
Y軸負責帶動導向機構在流水線交叉方向左右運動,完成分道的工作;Y軸方向折合負載約為45 kg,有效運動行程為390 mm(6道×65 mm),每次移動 65 mm,須在X軸等速段完成后,開始做加速減速運動。完成變道的時間約為0.28 s,運動規律如圖5示。為使Y軸運動模塊能承擔更高載荷和Y軸運動距離小的特點,結合機器的整體結構,Y軸運動模塊選用伺服電機通過皮帶傳動減速后,再驅動滾珠絲杠帶動擺動隔板組件的運動模式。Y軸運動模塊以縱向安裝,可以選比X軸運動模塊負載更小的系列型號,經濟性是顯而易見的。
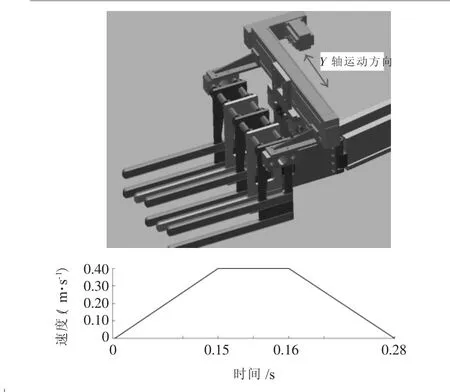
圖6
4 結語
本文較詳細地介紹了十字架式高速伺服分瓶器的結構和工作原理。經過多家飲料廠使用后,驗證了它具有工作可靠、運轉靈活、操作方便、分瓶速度快,分瓶精度高等特點,且本機與瓶子接觸的鋁合金隔板上包有一層低摩擦系數的塑料材料,使維護運行操作的成本降低,是食品飲料行業包裝異型瓶時的首選設備。
[參考文獻]
[1]徐元昌.工業機器人[M].北京∶中國輕工業出版社,1999.
[2]陳曉勇.機器人的結構設計[J].機械研究與應用,2004,17(1):53-54.
[3]熊有倫.機器人技術基礎[M].武漢∶華中科技出版社,2002∶79-82.
[4]劉遠強,楊曉紅.一種高速分瓶機:中國,CN101905753A[P].2010-12-08.
