帶落角約束與控制約束的縱向制導律①
2014-03-15 06:50:06王松艷
固體火箭技術 2014年3期
關鍵詞:指令
董 晨,晁 濤,王松艷,楊 明
(哈爾濱工業大學 控制與仿真中心,哈爾濱 150080)
0 引言
攻擊地面目標的飛行器在保證終端脫靶量滿足指標要求的同時,還要根據目標類型達到特定的落角,以獲得最佳的毀傷效果。這種需求促使帶落角約束的制導問題得到廣泛研究。目前,研究的制導律包括改進的比例導引律、最優制導律、變結構制導律及復合制導律等[1]。改進的比例導引律是通過在經典的比例導引律中增加偏置項[2]、引入變比例系數[3]等方法實現終端角度約束,對制導輸入信息要求較少,易于工程實現。最優制導律是在一定的假設和簡化基礎上,將帶落角約束的制導問題轉化為帶終端約束的最優控制問題,并利用最優控制方法得到的[4-6]。最優制導律能夠得到顯式的制導方程,算法較簡單,但對模型的精確性要求較高,且推導過程中的簡化與假設限制其應用范圍。為此,利用變結構控制具有的強魯棒性,根據落角約束設計滑動模態,推導得到變結構制導律[7-9]。變結構制導律能有效抑制參數攝動和外部擾動,但存在抖震現象,降低制導精度與性能[10]。復合制導律則通過將若干種制導控制方法相結合,產生較好的制導效果,如最優變結構制導律[11]、神經網絡自適應制導律[12]等。然而,目前對同時考慮落角約束和控制約束的制導問題鮮有研究。在末制導階段飛行器的航向一般已對準目標,在保持航向的同時,制導系統會給出較大幅值的攻角指令,使飛行器在縱向平面內快速下降,并獲得期望落角。但由于結構強度、氣動特性等因素的制約,攻角指令存在幅值限制。因此,有必要對帶落角約束和控制約束的縱向制導問題進行研究,在控制受限的情況下保證終端脫靶量和落角滿足指標要求。
針對帶落角約束與控制約束的制導問題,本文提出一種攻擊地面固定目標的縱向制導律。利用非線性系統的反饋線性化和坐標變換得到用于制導律設計的線性模型。在此基礎上,將制導問題轉化為存在控制飽和的線性定常系統的鎮定問題。基于參量Lyapunov方程方法為該線性系統設計低增益狀態反饋律,推導得到帶落角約束和控制約束的縱向制導律。給出制導律參數的在線整定方法,保證視線角及其轉率在一定時間內分別收斂至期望落角和零,且控制約束得到滿足。以某飛行器為例,針對多種攻擊任務,利用數值仿真驗證本文提出制導律的有效性。
1 帶落角約束和控制約束的制導問題
1.1 質心運動、彈目運動及制導律設計模型
假設平面地球,并忽略地球自轉和飛行器側向運動,以時間t為自變量,慣性系下的飛行器縱向質心運動方程[13]如下所示:
(1a)
(1b)
(1c)
(1d)
式中v、θ、x、y分別為速度、彈道傾角、水平方向位置、高度;m為質量;g為重力加速度;L與D分別為升力和阻力,L=ρv2SrefCL(α,Ma)/2,D=ρv2SrefCD(α,Ma)/2;Sref為參考面積;ρ為大氣密度,由標準大氣(1976美國)模型計算;CL、CD分別為升力系數與阻力系數,是攻角α和Ma的函數,由擬合多項式計算。
不失一般性,設地面固定目標位于慣性系(x-y)原點,飛行器初始位置在慣性系的第二象限內,則彈目距離r及其對時間的導數、視線角λD及其對時間的導數可通過下式計算:
(2a)
(2b)
(2c)
(2d)
記常量λD*為期望落角,基于式(2c)與式(2d)取坐標變換:
(3)
可得線性制導律設計模型:

(4a)

(4b)
其中,控制量u為
(4c)
x與y的二階導可通過質心運動方程(1)得到:
(4d)
1.2 制導問題描述
帶落角約束和控制約束的制導問題轉化為存在輸入飽和的線性定常系統的鎮定問題。
設計控制律,使系統
(5)
的狀態由初值Z0收斂至原點。
定義Uu為
Uu={u∈|umin≤u≤umax}
(6)
(7)
其中,umax與umin可由式(4c)與式(4d)根據氣動數據及攻角的允許范圍計算。
2 帶落角及控制約束的制導律
2.1 基于參量Lyapunov方程的制導律設計
針對所描述的制導問題,通過一個定理給出基于參量Lyapunov方程的制導律設計方法,得到帶落角和控制約束的制導律。在給出定理及證明前,首先給出如下的引理。
引理(基于PLE的低增益反饋)[14]對存在控制飽和的線性系統:

(8)
其中,x∈n,u∈m,飽和函數sat():m→m。設(A,B)可控且A的所有特征值均位于虛軸上,則如下的一組低增益狀態反饋律
u(t)=-R-1BTP(γ)x(t),γ>0
(9)
以不低于e-(γ/2)t的收斂速率半全局鎮定系統(8)。其中,P(γ)=W-1(γ),W(γ)為PLE
(10)
的唯一正定解,即對于任一給定的有界集合X∈n,存在γ*>0,使得對任意γ∈(0,γ*),閉環系統是漸進穩定的,X位于吸引域中,且閉環系統狀態收斂至原點的速度不低于e-(γ/2)t。
基于引理,由如下的定理給出帶落角約束及控制約束的制導律,使飛行器的視線角轉率收斂至0,同時視線角收斂至期望的落角,且收斂速率可通過取合適的制導律參數保證。
定理(帶落角約束及控制約束的制導律) 對于所描述的制導問題,制導律
(11)
使視線角及視線角轉率以不低于e-(γ/2)t的速度分別收斂于期望落角λD*和0。其中,γ為可調的制導律參數,aLOSy為總加速度在視線坐標系y軸的分量。
證明:易知總加速度在視線坐標系y軸的分量為
(12)
聯立式(11)與式(12),整理可得
(13)
基于式(3),取坐標變換方程:
(14)
將式(2)與式(4d)代入式(13),并利用式(14)進行坐標變換,經整理有
(15)
取R=1,I∈2×2為單位陣,式(15)滿足:
(16)
其中,P(γ)∈2×2為
?γ>0
(17)
取W(γ)=P(γ)-1,則
(18)
易知,W(γ)為PLE(10)的唯一正定解。結合系統(5)可見,式(16)為系統(5)的低增益狀態反饋律。系統階數n=2,控制量數m=1,(A,B)可控,且A的2個特征值λ1,2(A)=0(均位于虛軸上)。由引理,狀態反饋律(16)以不低于e-(γ/2)t的速率半全局鎮定系統(5)。因此,制導律(11)使視線角及視線角轉率以不低于e-(γ/2)t的速度分別收斂于期望落角和零。
注1(系統狀態的收斂時間) 不失一般性設初始時刻為0,?γ>0,則式(5)與式(16)構成的閉環系統可由如下的二階常系數齊次線性微分方程描述:
(19)
該微分方程特解為
(20)
記z(t)的收斂時間為tγ,|z(t)|≤δ,?t≥tγ,δ為一給定的小正數。tγ為γ的函數,但函數|z(tγ)|-δ=0不存在解析解。由z(t)的收斂速度隨γ單調遞增可知,tγ隨γ單調遞減,故tγ可由數值算法快速計算。
注2(與最優制導律比較) 由帶落角約束的最優制導律[1]整理可得
(21)
(22)
對比式(21)與式(22)可見,本文提出的制導律與最優制導律有相同的反饋項,2種制導律計算所需的信息是一致的;本文的制導律可由參數γ調整制導律中視線角速率與視線角偏差的權重,參數γ對制導的影響將在第3節中做具體分析。
2.2 制導律參數在線整定
在得到如式(11)所示制導律后,需要確定制導律參數γ,使得系統(5)的狀態由初值收斂至原點,且控制量滿足約束條件。
參數γ影響控制量的幅值以及系統狀態收斂的速度。若要以期望的落角擊中目標,需使收斂時間小于等于飛行時間,則γ應取足夠大的值;但增大γ會使控制量增大,可能導致控制飽和破壞閉環系統的穩定性[15]。此外,攻擊階段的飛行狀態大范圍急劇變化,采用常值γ難以獲得良好的制導效果。故需要對制導律參數γ進行在線整定,權衡對收斂時間和控制量的要求,獲得最佳的制導效果。
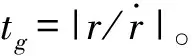
為此,給出制導律參數在線整定方法。制導律參數整定原理如圖1所示。
圖1 制導律參數整定
在參數整定過程中,對控制未飽和與控制飽和情況作如下處理。
(1)當控制未飽和時,取參數整定方程
tr(γ)-tg=0
(23)
由式(23)整定制導律參數γ,使由式(5)與式(16)構成的閉環系統的狀態在終端時刻收斂至原點,進而保證終端視線角等于期望落角,且視線轉率為零。
(2)當控制飽和時,取參數整定方程
(24)
其中,us為控制飽和時起作用的控制量邊界值(umax或umin),方程(24)的2個解為
(25)
取γ1,2中大于零的解作為控制飽和時的制導律參數γ,保證控制量滿足約束條件的限制。
基于整定后的制導律參數γ,由式(11)計算制導指令。制導律(11)得到的是總加速度在視線坐標系y軸上的分量。基于升力系數和阻力系數的擬合多項式以及飛行速度、高度、彈道傾角等狀態,通過求解非線性代數方程,即可解得相應的攻角指令。
3 數值仿真與分析
以某飛行器為例,假設其在飛行過程中保持零傾側,以方程(1)模擬其質心運動。對于制導問題研究,可忽略飛行器姿態運動,以攻角指令代替攻角作為質心運動模型的輸入。仿真初始條件按照表1設定。當彈目距離小于100 m時,飛行器轉為無控飛行。終端約束要求脫靶量小于1 m,落角誤差小于2°。將本文提出的制導律(22)記為PLEG。作為對比,在式(21)的最優制導律上附加由攻角指令約束轉化的控制約束,保證攻角指令在給定范圍內,將此制導律記為OPTG。針對多組具有不同落角約束和攻角指令約束的任務,對2種制導律進行仿真。考慮到飛行器姿控系統的能力限制,仿真中加入20°/s的攻角指令速率限制。
3.1 控制未受限時的仿真
取期望的落角λD*=-60°,并假設攻角指令幅值不受限制。仿真結果如表2和圖2所示。

表1 仿真初始條件

表2 控制未受限仿真結果
(a)飛行軌跡 (b)攻角指令-時間曲線
(c)制導律參數γ與剩余飛行時間
由表2可見,PLEG與OPTG的脫靶量及落角均滿足要求,且PLEG的制導精度優于OPTG。由圖2(a)可見,2種制導律導引下的軌跡均按期望的角度擊中目標,且圖2(b)中的攻角指令-時間曲線未受約束。由圖2(c)可見,PLEG的參數γ在初始時刻位于1/tg與2/tg中間偏上,飛行過程中γ逐漸向2/tg接近,直至最后階段γ超過2/tg。故由式(21)與式(22),在飛行過程中PLEG的視線轉率反饋項系數和視線角反饋項系數均大于OPTG。因此,PLEG是較OPTG以更大控制作用進行控制,取得了更好的制導效果。
3.2 控制受限時的垂直落角約束攻擊仿真
在帶垂直落角約束的攻擊任務中,取期望的落角λD*=-90°,設攻角指令范圍分別為-12°~12°和-9°~9°。仿真結果如表3與圖3所示。
表3 垂直落角約束攻擊仿真結果
(a)-12°~12°,飛行軌跡 (b)-12°~12°,攻角指令-時間曲線
(c)-9°~9°,飛行軌跡 (d)-9°~9°,攻角指令-時間曲線
由表3可見,在不同攻角指令范圍內,2種制導方法的脫靶量和落角均滿足指標要求,PLEG的脫靶量與落角偏差均小于OPTG。由圖3(a)、(b)可見,PLEG的飛行軌跡較OPTG的飛行軌跡平緩,PLEG的攻角指令較OPTG的變化平緩,有利于姿態控制系統跟蹤攻角指令。如圖3(c)所示,由于攻角指令受限,OPTG導引下的飛行軌跡未能快速下壓,軌跡由目標上空穿過并被“拉回”,導致了較大的落角偏差(約1.06°);而在同樣情況下,PLEG由于采用了制導律參數在線整定,其飛行軌跡能夠快速下壓,落角偏差(約0.16°)小于OPTG。而圖3(d)所示的OPTG攻角指令-時間曲線長期處于飽和狀態,且飛行末段攻角指令變化較大,因而影響了制導精度;而PLEG的攻角指令-時間曲線則相對平緩,且末端攻角指令幅值較小,易于獲得良好的制導精度。
3.3 控制受限時的水平落角約束攻擊仿真
在帶水平落角約束的攻擊任務中,設期望落角λD*=0°,攻角指令范圍分別為-12°~12°和-9°~9°時的仿真結果如表4與圖4所示。
表4 水平落角約束攻擊仿真結果
(a)-12°~12°,飛行軌跡 (b)-12°~12°,攻角指令-時間曲線
(c)-9°~9°,飛行軌跡 (d)-9°~9°,攻角指令-時間曲線
由表4可見,在不同攻角指令范圍內,在2種攻角指令受限的情況下,PLEG的制導精度均優于OPTG的制導精度,脫靶量和落角誤差滿足指標要求。由圖4(a)和圖4(c)所示的飛行軌跡可見,對于帶水平落角約束的攻擊任務,PLEG與OPTG導引下的飛行軌跡均能夠擊中地面目標。由圖4(b)和圖4(c)所示的攻角指令-時間曲線可見,PLEG和OPTG的攻角指令-時間曲線變化趨勢大體相同,但在飛行末段PLEG的攻角指令趨于零,其終端攻角指令幅值較小,易于獲得較高的制導精度;OPTG的攻角指令在飛行末段變化較大,且終端攻角指令幅值大于PLEG,致使OPTG的脫靶量和落角誤差均大于PLEG。
4 結論
(1)提出的制導律對多種帶落角約束及控制約束的對地攻擊任務具有良好的適應性。在所有考察的任務中,飛行過程中的攻角指令以及軌跡終端的落角均滿足指標要求,獲得了良好的制導精度。
(2)提出的制導律參數在線整定方法能夠根據過程約束及剩余飛行時間自動的對制導律參數進行在線調整,保證控制約束及落角約束的滿足。同時,避免了針對不同任務重新調整參數、離線湊試參數等問題,使制導律具有良好的工程適用性。
參考文獻:
[1] 蔡洪,胡正東,曹淵.具有終端角度約束的導引律綜述[J].宇航學報,2010,31(2):315-323.
[2] Kim B S,Lee J G,Han H S.Biased PNG law for impact with angular constraint[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(1):277-288.
[3] Ratnoo A,Ghose D.Impact angle constrained guidance against nonstationary nonmaneuvering targets[J].Journal of Guidance,Control and Dynamics,2010,33(1):269-275.
[4] Kim M,Grider K V.Terminal guidance for impact attitude angle constrained flight trajectories[J].IEEE Transactions on Aerospace and Electronic Systems,1973,9(6):852-859.
[5] Lee J I,Jeon I S,Tahk M J.Guidance law to control impact time and angle[J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(1):301-310.
[6] 王川,馬清華,劉新學.一種再入機動彈頭最優制導律研究[J].彈箭與制導學報,2007,26(2):8-11.
[7] 吳鵬,楊明.帶終端攻擊角度約束的變結構制導律[J].固體火箭技術,2008,31(2):116-120.
[8] 胡正東,曹淵,蔡洪.帶落角約束的再入機動彈頭的變結構導引律[J].系統工程與電子技術,2009,31(2):393-398.
[9] Harl N,Balakrishnan S N.Impact time and angle guidance with sliding mode control[J].IEEE Transactions on Control Systems Technology,2012,20(6):1436-1449.
[10] 賈慶忠,劉永善,劉藻珍.電視制導侵徹炸彈落角約束變結構反演制導律設計[J].宇航學報,2008,29(1):208-214.
[11] Sun W M,Zheng Z Q.3D variable structure guidance law based on adaptive model-following control with impact angular constraint[C]//Proceedings of the 26th Chinese Control Conference,ZhangJiaJie,China,2007.
[12] 胡正東,郭才發,蔡洪.帶落角約束的再入機動彈頭的復合導引律[J].國防科技大學學報,2008,30(2):21-26.
[13] 錢杏芳,林瑞雄,趙亞男.導彈飛行力學[M].北京:北京理工大學出版社,2008:36-48.
[14] Zhou B,Duan G R,Lin Z.A parametric lyapunov equation approach to the design of low gain feedback[J].IEEE Transactions on Automatic Control,2008,53(6):1548-1554.
[15] Zhou B,Cui N G,Duan G R.Circular orbital rendezvous with actuator saturation and delay:a parametric Lyapunov equation approach[J].IET Control Theory and Applications,2012,6(9):1281-1287.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
