檢測與診斷齒輪裂紋故障的一種方法
2014-02-27 01:50:08陳漢新楊詩琪
武漢工程大學學報 2014年9期
陳漢新,劉 岑,楊詩琪
武漢工程大學機電工程學院,湖北 武漢430205
0 引 言
齒輪的作用主要體現(xiàn)在齒輪箱傳遞動力和連接的過程中,齒輪箱的故障診斷是對其中的零部件進行診斷,例如齒輪、轉(zhuǎn)子和滾動軸承.根據(jù)統(tǒng)計,由齒輪問題引起的故障占到機械傳動中所發(fā)生的故障至少有60%,因此對齒輪箱中的齒輪進行故障診斷的深入研究勢在必行.
粒子濾波是在20世紀90年代出現(xiàn)的濾波計算方法[1],他主要是通過利用隨機的樣本來對概率分布加以描述,其中被描述的樣本就叫做“粒子”,再根據(jù)測量情況,適當調(diào)整每個粒子其權(quán)值的數(shù)據(jù)以及每個樣本的具體方位,來近似實際概率分布.Merwe[2]等提出了無跡粒子濾波算法,但實時性不佳;文獻[3]在粒子濾波方法中引入徑向基函數(shù)網(wǎng)絡(RBFN)學習方法,即在采樣的時候?qū)αW蛹械乃辛W泳垲悾皶r更新粒子狀態(tài),提高先驗概率密度分布估計精度,消除猶豫過程噪聲引起的誤差,將粒子濾波的性能提高.
Wald[4]在1947年提出了序貫概率比檢驗算法,近年來,該檢驗方法在故障診斷方面有了廣泛的運用,但在齒輪箱故障診斷時必須要事先確定好樣本的數(shù)目.從文獻[5]中可知序貫概率比檢驗算法比傳統(tǒng)抽樣檢測所需要的樣本量更少.由文獻[6-7]可以知道在所有故障模式中,齒輪裂紋最易模擬,因此選擇齒輪裂紋來進行診斷分析是可行的,但是實驗中得到的信號不僅包括有用信號同時還夾雜著噪聲等干擾,影響了系統(tǒng)的穩(wěn)定性.
基于參數(shù)序貫概率比檢驗的齒輪裂紋故障診斷方法,是將每個假設(shè)檢驗數(shù)據(jù)與設(shè)定值進行比較,具有不預先規(guī)定觀測樣本群數(shù)量的優(yōu)點;因此,文中提出的將RBF網(wǎng)絡優(yōu)化的粒子濾波與序貫概率比檢驗相結(jié)合的方法,即首先運用RBF網(wǎng)絡優(yōu)化粒子濾波算法對信號進行降噪處理,獲得穩(wěn)定信號;然后采用對沖擊性振動極其敏銳的峭度值作為特征參數(shù),利用時域分析法來處理對信號加以降噪處理之后的特征數(shù)值;最后利用序貫概率比檢驗算法來分析齒輪裂紋的故障.實驗研究表明,文中提出的方法對齒輪裂紋故障診斷是有效與可靠的.
1 RBF網(wǎng)絡優(yōu)化的粒子濾波原理
RBF網(wǎng)絡優(yōu)化的粒子濾波原理就是利用徑向基函數(shù)網(wǎng)絡能以任意精度逼近任意連續(xù)函數(shù)的性能來優(yōu)化粒子濾波的采樣過程.通過RBFN對初始化后的目標狀態(tài)進行完整性的全局估計,利用徑向基函數(shù)神經(jīng)網(wǎng)絡學習算法更新各粒子狀態(tài),從而獲取新的重要性權(quán)值.基本步驟如下:


步驟5:輸出.得到更新后的狀態(tài)估計.
2 序貫概率比檢驗原理
文獻[8]中序貫概率比檢驗算法可總結(jié)為:設(shè)x1,x2,…為一組滿足獨立同分布的隨機變量序列.xi在這里代表的是樣本集{xi}中任意的觀察數(shù)值,假設(shè){xi}是離散型隨機變量,其條件概率分布假定為f(x/θ),其中,{xi}之分布由θ確定.
就二元變量序貫概率比檢驗而言,初假設(shè)是H0∶θ=θ0,備擇假設(shè)是H1∶θ=θ1.
它們的聯(lián)合分布密度函數(shù)為:

序貫概率比檢驗的似比λ為:
λn(x)=λn(x1,…,xn)=
依照假設(shè)檢驗里面的一類錯誤概率α以及二類概率β得出閾值A(chǔ)與B(A>B).在這里x1為集合里面的首個觀察數(shù)值,把它代進上一個公式里面求出似然比,即λ1(x1).之后同之前設(shè)置的閾值加以對比,最終判斷故障模式.如果似然比滿足:
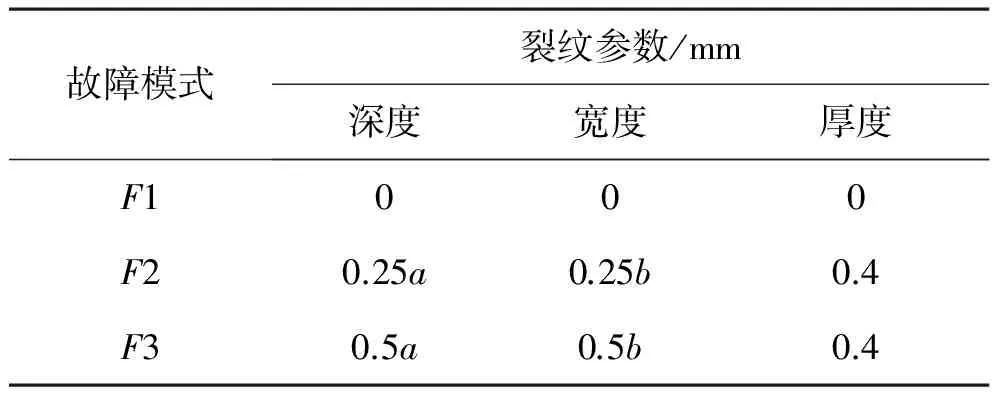
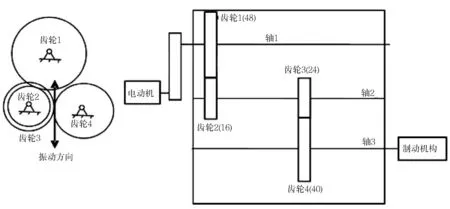
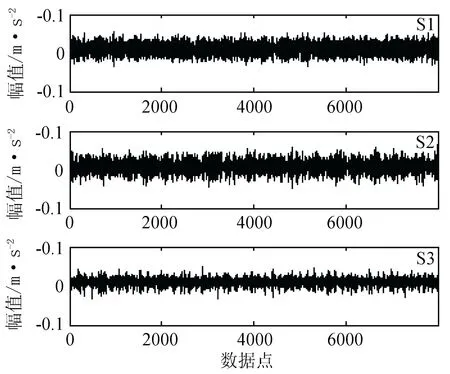
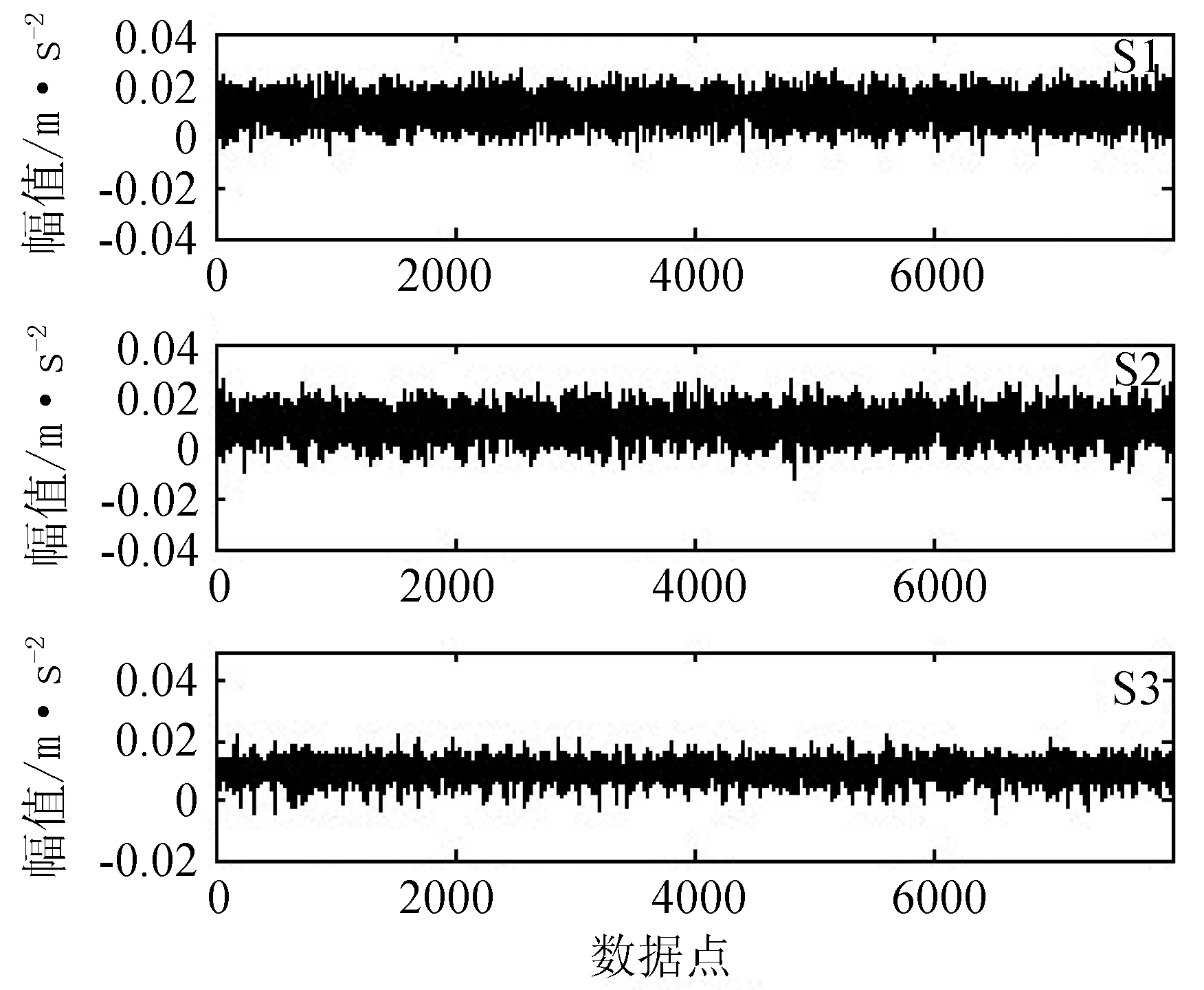
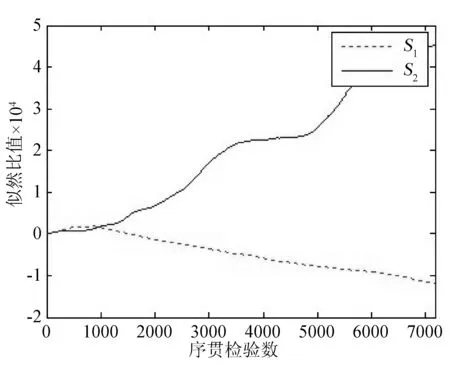
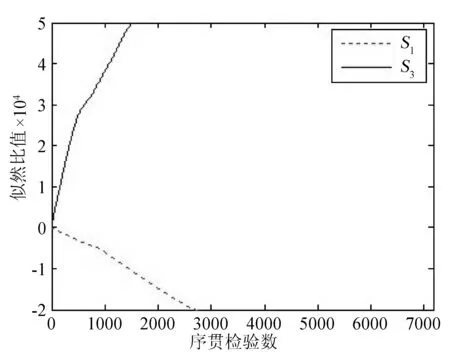
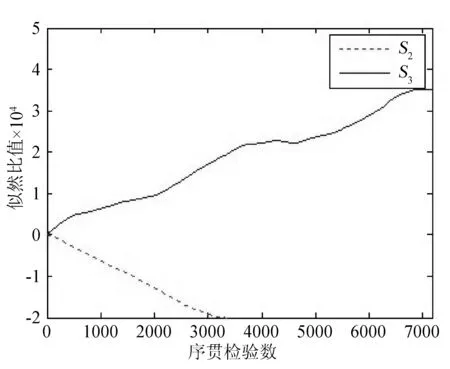
λ1(x1) 則終止檢測,按照初假設(shè)H0處理,放棄H1;如果似然比滿足: λ1(x1)>A 依然終止抽樣,拒絕初假設(shè)H0同時接受備擇假設(shè)H1;如果似然比為: B≤λ1(x1)≤A 接著使用下一個觀察數(shù)值求出似然比λ2(x1,x2).假如似然比符合λ2(x1,x2) 整個系統(tǒng)允許出現(xiàn)的錯誤概率α與β直接確定檢驗當中的主要的邊界常數(shù)A、B.α、β同A、B兩個常數(shù)有著以下的密切聯(lián)系: 為檢驗所設(shè)計的新檢測方法對于故障的確定是否有效,模擬了齒輪箱振動實驗,這里有三種情況組成,分別為非故障情況下的F1與故障情況下的F2、F3.所謂的非故障就是不存在裂紋,用F1代表;故障情況的是用F2與F3代表,亦即存在裂紋.在這里的F2代表裂紋的深度和寬度分別是裂紋全深度和全寬度的25%,而F3代表的裂紋分別為全深度和全寬度的50%.其中裂紋全深度a為2.4 mm,是弦齒厚度的的50%,裂紋全寬度b為25 mm,厚度是0.4 m,壓力角均為45°.將齒輪箱設(shè)定為空載狀態(tài)下運行,轉(zhuǎn)速為800 r/min,設(shè)定的三個故障情況如表1所示. 表1 三種故障模式 圖1表示齒輪箱工作結(jié)構(gòu),齒輪3、4由于沖擊力會導致振動,可任意選擇其一來對故障情況進行模擬.本實驗中選取齒輪3來模擬. 把2個加速傳感器裝到齒輪箱水平垂直方向,利用動態(tài)模擬器收集它的振動信號,應用頻譜分析儀,對收集到的信號數(shù)據(jù)加以傳輸存儲.本文僅就水平方向的信號加以處理分析,其中,使用S1代表非故障情況下的信號,S2表示25%裂紋齒輪下采集到的振動信號,而S3表示50%裂紋齒輪下采集到的原始振動信號. 圖1 齒輪箱工作結(jié)構(gòu)圖 通過RBFN的優(yōu)化,各粒子狀態(tài)更新將趨向于真實狀態(tài),更加符合實際情況.同時也提高了對目標狀態(tài)的概率分布估計精度,減少了粒子更新過程中誤差累計對狀態(tài)估計的影響.它不再利用固定的狀態(tài)方程更新目標狀態(tài),而是根據(jù)對目標狀態(tài)預測的實際需要,通過前若干時刻測量值的干預,避免粒子狀態(tài)估計受到積累誤差的影響,增強粒子狀態(tài)估計過程的適應能力,從而獲得更細致、準確的平穩(wěn)信號,用以序貫概率比檢驗. 特征參數(shù)能夠反映振動信號的特征信息,將原始振動信號進行優(yōu)化粒子濾波降噪得到接近真實值的數(shù)據(jù)集合,再從中提取相關(guān)特征參數(shù),實驗中的離散待檢信號xi=[x1,x2,…,xN] ,N=8 192,每組取1 024個檢驗點,這樣就可以得到7 169組檢驗數(shù)據(jù).能夠使用下列方式就算出不同的參數(shù). 峭度值集合ki=[k1,…,kn]是研究中需要的離散檢驗信號,其均值和標準差分別為: 峭度值對于振動信號非常敏銳,因此序貫概率比檢驗參數(shù)選擇峭度值來進行計算. 通過似然比計算發(fā)現(xiàn),方差以及平均值對其結(jié)果有很大的影響.通過RBF優(yōu)化粒子濾波降噪,發(fā)現(xiàn)提取出的振動真實值序列符合高斯分布.當齒輪箱為正常狀態(tài)時,這一信號序列符合初假設(shè)H0:μ=μ0;當處于故障情況時,這一信號序列符合備擇假設(shè)H1:μ=μ1.其標準差σ不發(fā)生變化,均值產(chǎn)生變動,如果上述兩個假設(shè)都能成立,那么這一序列聯(lián)合密度如下. 式中,p0i表示初假設(shè)條件下的概率密度函數(shù),p1i表示備擇假設(shè)條件下的概率密度函數(shù).其似然比能夠用下面式子進行表示: 其中,p0為初假設(shè)條件下的先驗概率,p1為備擇假設(shè)條件下的先驗概率.在現(xiàn)實處理時,應當把公式作如下處理,從而使得計算更精確簡便. 此時,閾值a=lnA,b=lnB. 假如似然比符合Δ 圖3是正常模式以及兩種故障模式下所采集到的原始振動信號.其中S1為正常模式,S2表示裂紋為25%的齒輪振動信號,S3為50%的裂紋齒輪振動信號.將上述信號輸入濾波運算程序,即用RBF優(yōu)化粒子濾波去噪,得到最終的穩(wěn)定信號,如圖4所示. 峭度值對振動信號反應非常敏銳,其均值的變化對于檢驗時間、精確性及似然比影響甚大.假設(shè)H0與H1兩種情況下其對應的犯第一類錯誤和第二類錯誤概率是一致的,取α=β=0.005,同時確定觀測所得的信號的先驗概率一致. 圖2 序貫概率比檢驗流程圖 圖3 實驗中得到的三組振動信號 通過似然比計算公式可知,均值的偏差對于計算結(jié)果Δ的影響很大.非故障情況信號S1的平均值記為參數(shù)μ0,故障情況S2與S3的平均值記為參數(shù)μ1,檢驗其信號,可得到圖5. S1的平均值記為μ0,S2的平均值記為μ1,代入似然比公式計算,得到圖5(a).從圖5(a)可知,將真實振動序列S1輸入序貫檢驗程序時,計算結(jié)果滿足Δ 圖4 RBF優(yōu)化粒子濾波去噪后的振動信號 (a) (b) 值得注意的是,對不同程度的齒輪裂紋信號也可以運用序貫概率比檢驗算法進行區(qū)分.對于S2與S3,將S2的平均值記為μ0,將S3的平均值記為μ1,構(gòu)建檢驗模加以計算,可得到圖6. 圖6 序貫概率比檢驗結(jié)果 由圖6可知,將S2的均值記為參數(shù)μ0,S3的均值記為μ1,將信號S2輸入似然比計算程序時,計算結(jié)果滿足Δ 基于RBF網(wǎng)絡優(yōu)化的粒子濾波降噪與序貫概率比檢驗相結(jié)合的原理,提出了一種對齒輪箱故障進行診斷與檢測的方法.將正常齒輪和兩種故障齒輪的狀態(tài)進行對比,最終識別不同齒輪箱狀態(tài),證實文中提出的方法能有效可靠地對齒輪進行故障的分析與診斷;研究成果可供復雜旋轉(zhuǎn)機械的故障檢測與診斷參考. 致 謝 感謝國家自然科學基金(61273176),教育部新世紀優(yōu)秀人才支持計劃(201010621237),湖北省教育廳科學技術(shù)研究重大項目(Z20101501)和教育部留學回國人員科研啟動基金(20091001)對本研究的資助. [1] GORDON N J, SALMOND D J, SMITH A F M . A novel approach to nonlinear/non-Gaussian Bayesian state estimation[J]. IEE Proceedings on Radar and Signal Processing, 1993, 140(2): 107-113. [2] MERWE R V, DOUCET A, FREITAS N D,et al. The unscented particle filter[R]. Technical Report CUED/F-INPENG/TR 380, Cambridge University Engineering Department, 2000. [3] CHEN Hanxin, TU Ling, SUN Kui, et al. Noise reduction method based on RBF network optimized particle filter[C]//Key Engineering Materials Vols,(589-590)2014:629-633. [4] WALD A. Sequential Analysis[M]. New York: Wiley,1947. [5] WALD A. Sequential tests of statistical hypotheses[J]. Ann. Math. Statist. 1945, 16(2): 117-186. [6] STANDER C J, HEYNS P S, SCHOOMBIE W. Using vibration monitoring for local fault detection on gears operating under fluctuating local conditions[J]. Mechanical Systems and Signal Processing. 2002, 16(6):1005-1024. [7] FAKHFAKH T, CHAARI F, HADDER M. Numerical and Experimental Analysis of a Gear System with Teeth Defects[J]. International Journal of Advanced Manufacturing Technology, 2005, 25(5-6):542-550. [8] YU Chenggang, SU Bingjing, A non-parametric sequential rank-sum probability ratio test method for binary hypothesis testing[J]. Signal Processing, 2004(84): 1267-1272.3 齒輪箱故障診斷試驗
4 齒輪裂紋的序貫概率比檢驗
4.1 RBF網(wǎng)絡優(yōu)化粒子濾波降噪
4.2 特征參數(shù)提取
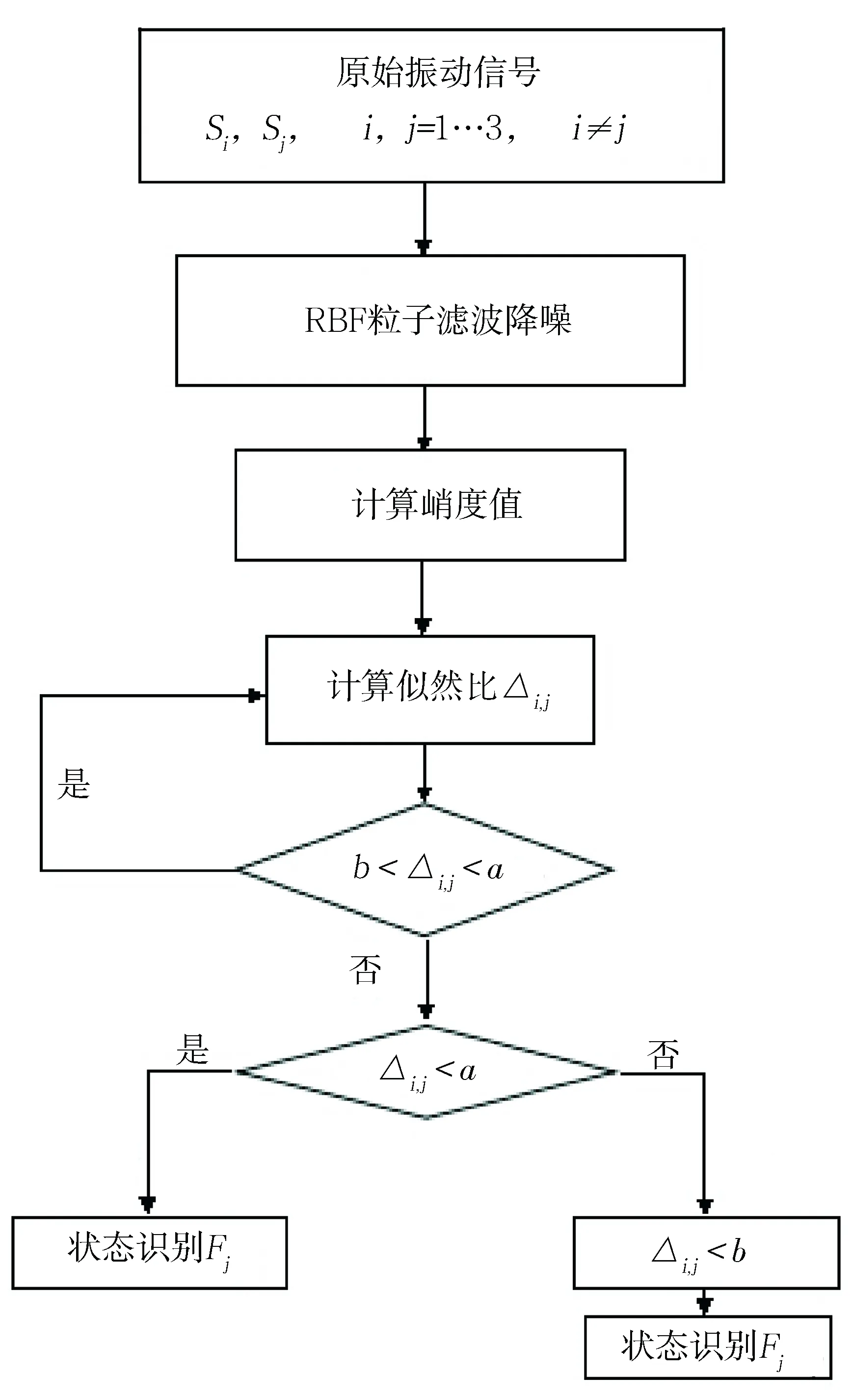
4.3 Wald序貫檢驗
5 結(jié)果與分析
6 結(jié) 語
猜你喜歡
艦船科學技術(shù)(2022年13期)2022-08-11 09:29:16鴨綠江(2021年35期)2021-04-19 12:24:18考試與評價·高一版(2020年6期)2020-11-02 02:45:24汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42World Journal of Diabetes(2019年7期)2019-07-23 11:52:08電子制作(2018年11期)2018-08-04 03:25:42汽車維護與修理(2016年10期)2016-07-10 08:17:41鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50汽車維護與修理(2015年2期)2015-02-28 12:15:39