智能小車對提高智能居家系統(tǒng)穩(wěn)定性的應(yīng)用研究
2014-01-24 02:35:28李玲香
湖南科技學(xué)院學(xué)報(bào) 2014年5期
李玲香 羅 鵬
(湖南科技學(xué)院 計(jì)算機(jī)與通信工程系,湖南 永州 425199)
智能小車對提高智能居家系統(tǒng)穩(wěn)定性的應(yīng)用研究
李玲香 羅 鵬
(湖南科技學(xué)院 計(jì)算機(jī)與通信工程系,湖南 永州 425199)
針對ZigBee智能居家系統(tǒng)中的網(wǎng)絡(luò)節(jié)點(diǎn)覆蓋范圍受環(huán)境因素影響較大,網(wǎng)絡(luò)可能出現(xiàn)不穩(wěn)定的情況,從而導(dǎo)致智能居家系統(tǒng)整體性能下降的問題。論文設(shè)計(jì)了一個移動的ZigBee節(jié)點(diǎn)——智能小車,它可以識別用戶家居環(huán)境中不同的房間及巡視居家環(huán)境,從而采集居家環(huán)境的不同地點(diǎn)傳感器節(jié)點(diǎn)的數(shù)據(jù),對故障節(jié)點(diǎn)進(jìn)行修復(fù)。實(shí)驗(yàn)證明,在智能家居系統(tǒng)中加入智能小車可以降低系統(tǒng)出故障的概率,提高了系統(tǒng)的覆蓋范圍和穩(wěn)定性。
智能家居;ZigBee;智能小車
0 引 言
當(dāng)前,智能家居系統(tǒng)中的內(nèi)部家庭網(wǎng)絡(luò)所采用的連接技術(shù)可以“有線”和“無線”兩大類[1]。有線方式雖然穩(wěn)定可靠,但是布線困難,可可擴(kuò)展性和維護(hù)性差,而無線技術(shù)以其傳輸靈活,移動性強(qiáng)等有線方式無法比擬的優(yōu)點(diǎn)而成為智能家居聯(lián)網(wǎng)技術(shù)的發(fā)展方向。近年來研究的無線傳感網(wǎng)絡(luò)ZigBee網(wǎng)絡(luò)已經(jīng)成為智能家居家內(nèi)部組網(wǎng)的研究重點(diǎn)[2]。雖然Zigbee技術(shù)基本可以滿足當(dāng)前的組網(wǎng)需求,但是在網(wǎng)絡(luò)容量,網(wǎng)絡(luò)覆蓋,抗干擾性等方面還存在不足[3]。無線智能家居網(wǎng)絡(luò)節(jié)點(diǎn)通信范圍小、穩(wěn)定性差是現(xiàn)階段智能家居網(wǎng)絡(luò)需要解決的主要問題之一。
本文在搭建好ZigBee智能家居網(wǎng)絡(luò)的基礎(chǔ)上,采用廣東天嵌公司的TQ2440開發(fā)板和三星公司的ARM9芯片,設(shè)計(jì)可以自動尋跡的移動ZigBee節(jié)點(diǎn)來提高智能家居網(wǎng)絡(luò)的通信范圍,增加網(wǎng)絡(luò)的穩(wěn)定性。
1 移動巡航節(jié)點(diǎn)必要性分析
智能家居系統(tǒng)內(nèi)部網(wǎng)絡(luò)拓?fù)涑2捎眯切汀湫秃途W(wǎng)狀結(jié)構(gòu)。對于靈活性、可靠性最優(yōu)的網(wǎng)狀網(wǎng)絡(luò),網(wǎng)絡(luò)中有一條鏈路斷開時(shí),ZigBee協(xié)調(diào)器都會根據(jù)路由表找到新的傳輸路徑,但是有一種情況如圖-1所示,當(dāng)節(jié)點(diǎn)B發(fā)生故障時(shí),節(jié)點(diǎn)A就會脫離網(wǎng)絡(luò),為了解決這種突發(fā)情況,將節(jié)點(diǎn)C安裝在擁有自動巡航功能的智能小車上,當(dāng)節(jié)點(diǎn)B發(fā)生故障時(shí)智能小車搭載節(jié)點(diǎn)C通過紅外尋跡,到達(dá)故障節(jié)點(diǎn)B的大概位置,對網(wǎng)絡(luò)進(jìn)行修復(fù)與補(bǔ)充。
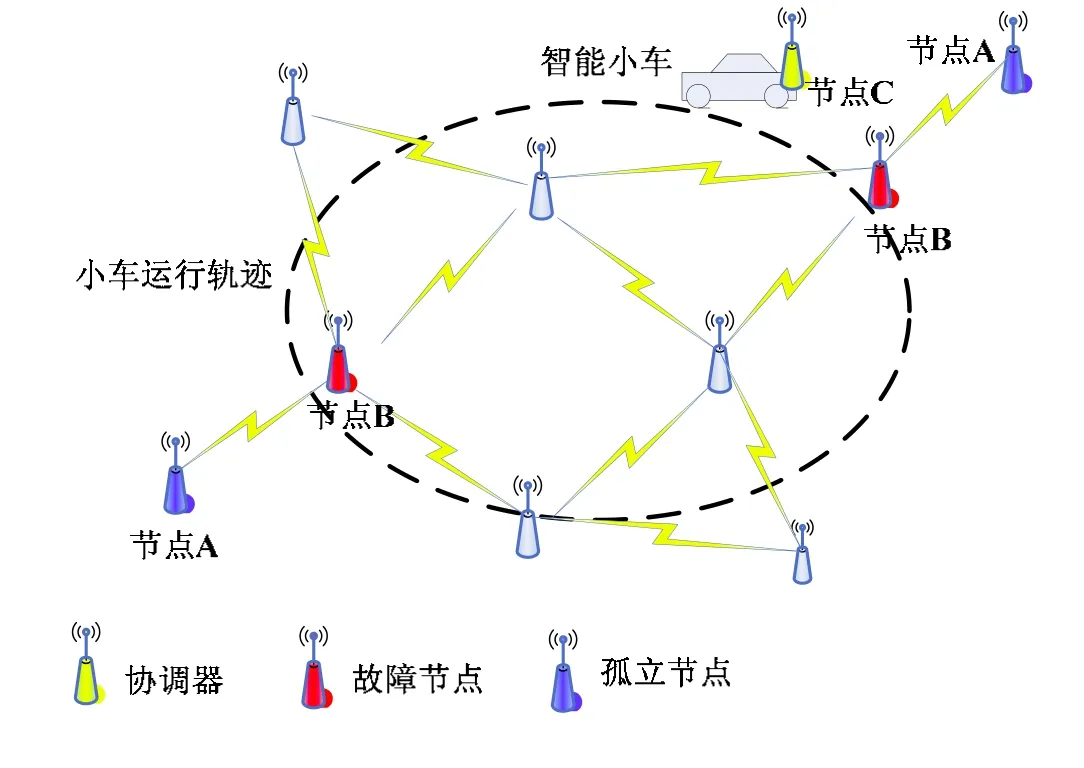
圖1 智能小車排障示意圖
如果用戶對系統(tǒng)的連接時(shí)延,誤碼率要求非常高,可以采用星型網(wǎng)絡(luò)結(jié)構(gòu),星型網(wǎng)絡(luò)具有最低的網(wǎng)絡(luò)復(fù)雜度,但是其網(wǎng)絡(luò)覆蓋范圍與網(wǎng)絡(luò)穩(wěn)定性也是最低的,引入智能小車巡航功能也可以提高其網(wǎng)絡(luò)覆蓋范圍。在星型網(wǎng)絡(luò)中,智能小車必須安裝ZigBee協(xié)調(diào)器,這樣才能最大程度的提高網(wǎng)絡(luò)的覆蓋范圍。
2 智能小車在智能居家系統(tǒng)中的應(yīng)用實(shí)現(xiàn)
2.1 智能小車尋跡策略實(shí)現(xiàn)
智能小車的巡航功能要通過尋跡算法實(shí)現(xiàn)智能小車對任務(wù)點(diǎn)的識別和智能小車出軌后的尋線動作[4]。本文中的智能小車采用文獻(xiàn)[4]中紅外線尋跡策略,在智能小車的車頭部分安裝了8個紅外傳感器,用于檢測小車行駛路徑。每個傳感器間距20mm,在制作尋跡道路的時(shí)候,將道路的寬度定為40~45mm,通過檢測到黑色路徑的傳感器編號來確定小車在道路中的位置,如圖-2所示。智能小車通過尋跡路線預(yù)判路徑的方向與轉(zhuǎn)角,然后,通過安裝在電機(jī)上的光電編碼器碼盤檢測小車底部4個電機(jī)的傳動速度,根據(jù)紅外傳感器獲取到的道路情況,使用脈寬調(diào)制PWM控制技術(shù)調(diào)節(jié)4個電機(jī)的轉(zhuǎn)速,從而達(dá)到小車轉(zhuǎn)彎的目的[5]。
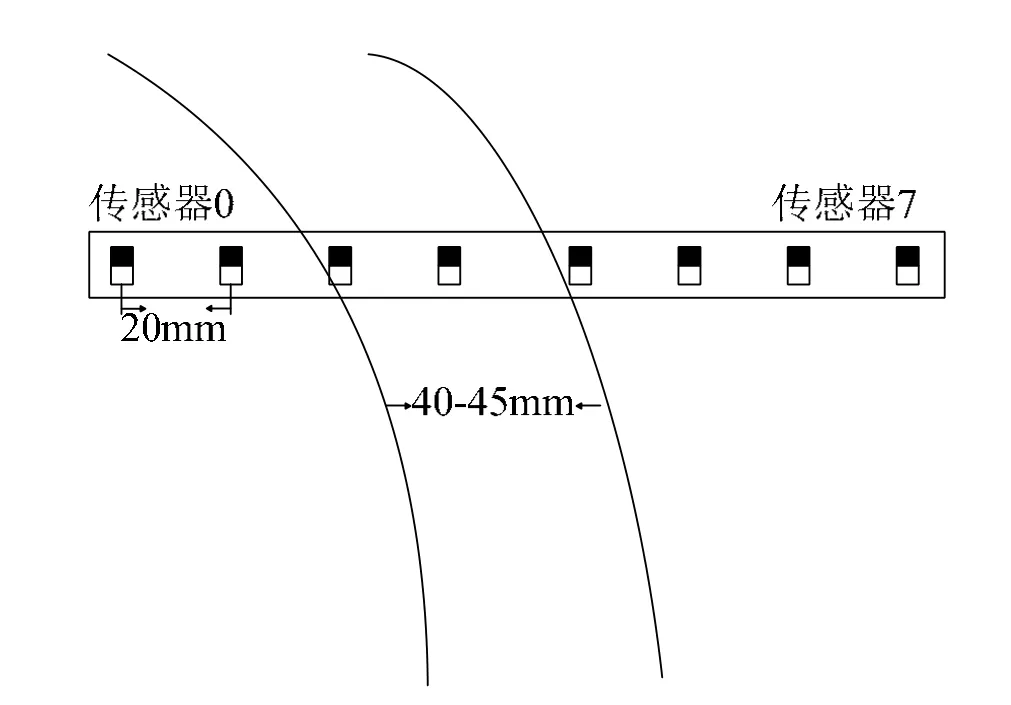
圖2 紅外尋跡與軌道示意圖
圖2中所示的每個紅外線傳感器之間的距離和黑線的寬度,這就使得小車在走直線時(shí)最少有2個紅外傳感器線檢測到黑線,最多有3個紅外傳感器檢測到黑線,如果用0表示紅外傳感器檢測到白,用1表示紅外傳感器檢測到黑,則智能小車就可以通過紅外傳感器獲取黑線信息,從而控制小車的轉(zhuǎn)向。
本文中的智能小車是通過4個由直流電機(jī)驅(qū)動的輪子不同轉(zhuǎn)速來實(shí)現(xiàn)小車的轉(zhuǎn)彎動作。由于處理器輸出的信號功率不能驅(qū)動直流電機(jī)轉(zhuǎn)動,所以通過2塊電機(jī)驅(qū)動芯片L298N芯片來驅(qū)動4個直流電機(jī)。
2.2 任務(wù)點(diǎn)設(shè)置
智能小車雖然可以根據(jù)黑線的直與彎自動尋跡行進(jìn),但它只能按照用戶規(guī)定的路線進(jìn)行巡視。在智能家居系統(tǒng)中,用戶往往需要獲取不同地點(diǎn)、不同房間的環(huán)境信息,針對這個問題,本文通過在黑線上設(shè)置任務(wù)點(diǎn),使得智能小車可以識別不同的房間和地點(diǎn)。
設(shè)置任務(wù)點(diǎn)的思想就是利用黑線和白線設(shè)置不同的排列組合,這些排列組合必須區(qū)別與正常行駛是的幾種組合方式,當(dāng)紅外線傳感器檢測到的排列組合和開發(fā)者在程序中定義排列組合相對應(yīng)的時(shí)候,小車就可以根據(jù)開發(fā)者在程序中對這種排列組合的描述來確定所處的房間位置。
由于實(shí)際環(huán)境中地面可能會出現(xiàn)裂痕、污點(diǎn)或雜物,這些因素會影響到紅外線傳感器對任務(wù)點(diǎn)檢測,從而判斷錯誤。在本文中的任務(wù)點(diǎn)選取了幾種連續(xù)黑線或者不容易產(chǎn)生混淆的黑線設(shè)置方案,又由于小車的車體可能會有大概一個傳感器距離的偏差,所以,最終可以明顯辨別的黑線編碼方式并不多,可用到的幾種編碼方式如圖-3所示。
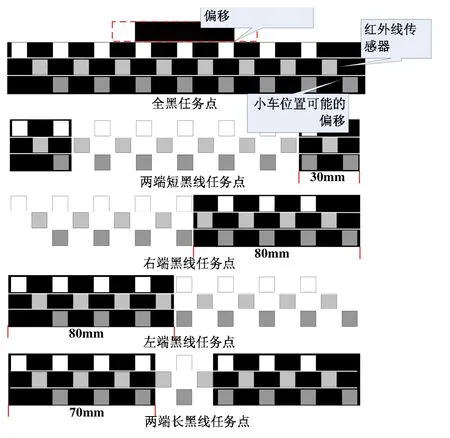
圖3 五種任務(wù)點(diǎn)示意圖
考慮到小車直行時(shí)車體位置可能出現(xiàn)的誤差,對出現(xiàn)誤差時(shí)任務(wù)點(diǎn)可能的情況進(jìn)行分析,選出了五中辨識度較高的任務(wù)點(diǎn)設(shè)置方案,具體編碼如表-1所示。
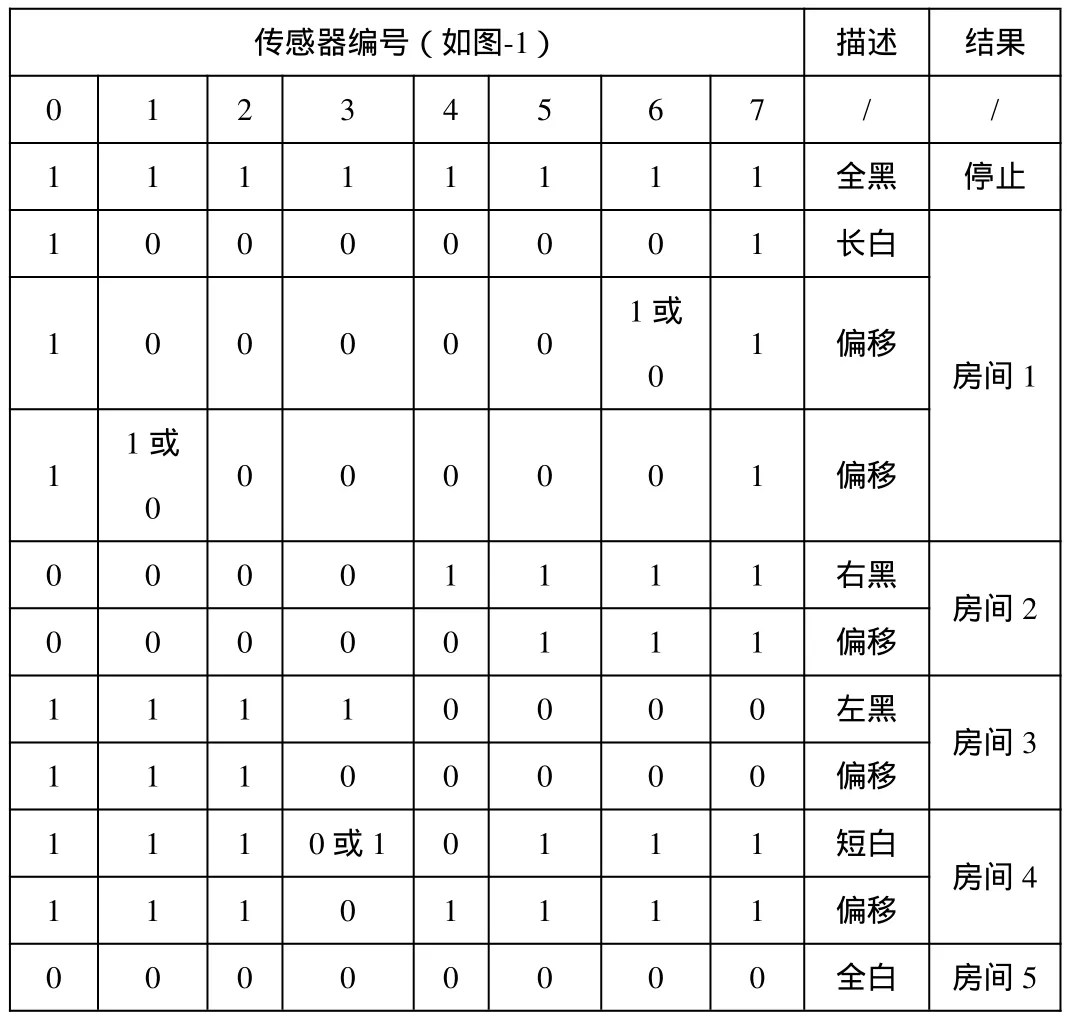
表-1任務(wù)點(diǎn)編碼表
2.3 智能小車尋跡實(shí)現(xiàn)
本文尋跡算法的原理是根據(jù)紅外線傳感器獲取的黑線情況估計(jì)小車與黑線的位置關(guān)系,然后通過調(diào)節(jié)左右輪子的轉(zhuǎn)速,控制小車調(diào)整車體位置,從而達(dá)到轉(zhuǎn)彎的目的,紅外線傳感器檢測到黑線則發(fā)送1到處理器,否則就發(fā)送0到處理器,處理器收到紅外線傳感器發(fā)送來的數(shù)據(jù),使用8次循環(huán)對8個傳感器數(shù)據(jù)進(jìn)行處理,紅外線傳感器從左到右依次賦以權(quán)重值i=0、1、2、3、4、5、6、7,a為傳感器傳送到處理器的信息0或1,通過公式(1)求得智能小車的轉(zhuǎn)彎速度的權(quán)值,其中sum為檢測到黑線的紅外線傳感器個數(shù),通過公式(2)和(3)可以計(jì)算出小車過彎時(shí)右側(cè)輪子和左側(cè)輪子的轉(zhuǎn)速,其中R可控制轉(zhuǎn)角大小,V是小車直行是輪子的轉(zhuǎn)速。可見當(dāng)黑線在小車中間時(shí),3、4號傳感器檢測到黑線時(shí)=0,和都等于小車直行是的轉(zhuǎn)速;當(dāng)黑線偏左時(shí),為負(fù)數(shù),變大,變小,小車做左轉(zhuǎn)彎動作;當(dāng)黑線偏右時(shí),為正數(shù),變小,變大,小車做右轉(zhuǎn)彎動作。
智能小車識別任務(wù)點(diǎn)是在尋跡程序中定義了任務(wù)點(diǎn)對應(yīng)的紅外線傳感器檢測到黑線的情況,并把他們保存在數(shù)組之中,當(dāng)紅外線傳感器輸入值和數(shù)組之中的某一項(xiàng)相同時(shí),則進(jìn)入任務(wù)點(diǎn),執(zhí)行用戶指定的任務(wù)動作。智能小車出軌后自動尋線動作要考慮到全白任務(wù)點(diǎn)的存在,當(dāng)小車紅外線傳感器輸入全零時(shí),進(jìn)入時(shí)間為2秒的延遲,期間小車?yán)^續(xù)直行,如果2秒延遲過后檢測不到黑線,則智能小車向左轉(zhuǎn)向90度,每隔一秒轉(zhuǎn)角減小5度,這樣,小車就會不斷的增大轉(zhuǎn)角做圓周運(yùn)動,當(dāng)重新檢測到黑線是,繼續(xù)通過黑線做尋跡行駛。圖-4為智能小車軟件實(shí)現(xiàn)流程圖。
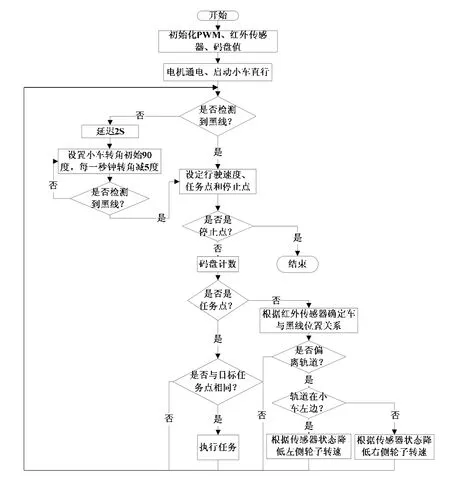
圖4 智能小車程序流程圖
3 實(shí)驗(yàn)與分析
為了獲取ZigBee網(wǎng)絡(luò)性能參數(shù),本文將Z-Stack協(xié)議棧Profile文件夾下AF.c文件中的結(jié)構(gòu)體afIncomingMSGP acket_t提取出來,在終端節(jié)點(diǎn)上連接CC Debugger仿真器,通過IAR的程序斷定調(diào)試功能,檢測不同時(shí)刻RSSI和LQI參數(shù)指標(biāo)。
其中RSSI即為信號強(qiáng)度指示,是真實(shí)的接收信號強(qiáng)度與最優(yōu)接收功率等級間的差值,RSSI在無線網(wǎng)絡(luò)中表示信號的強(qiáng)度,它隨距離的增大而衰減,通常為負(fù)值,該值越接近零,說明信號強(qiáng)度越高;LQI是鏈路質(zhì)量指示,表示接收數(shù)據(jù)幀的能量與質(zhì)量,其大小基于信號強(qiáng)度以及檢測到的信噪比,由MAC層計(jì)算得到并提供給上一層,一般與正確接收到數(shù)據(jù)幀的概率有關(guān)[6]。圖-5與圖-6分別為協(xié)調(diào)器圖5與圖6分別為協(xié)調(diào)器與測試節(jié)點(diǎn)相距0~30米的無障礙環(huán)境中測得的RSSI指數(shù)與LQI指數(shù)分布圖。
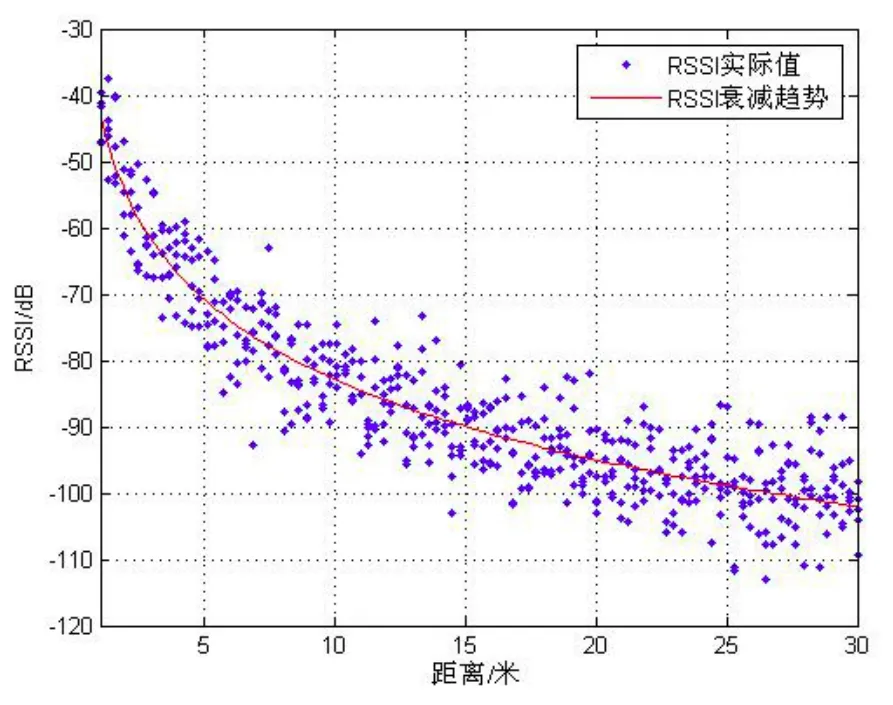
圖5 無障礙環(huán)境RSSI統(tǒng)計(jì)圖
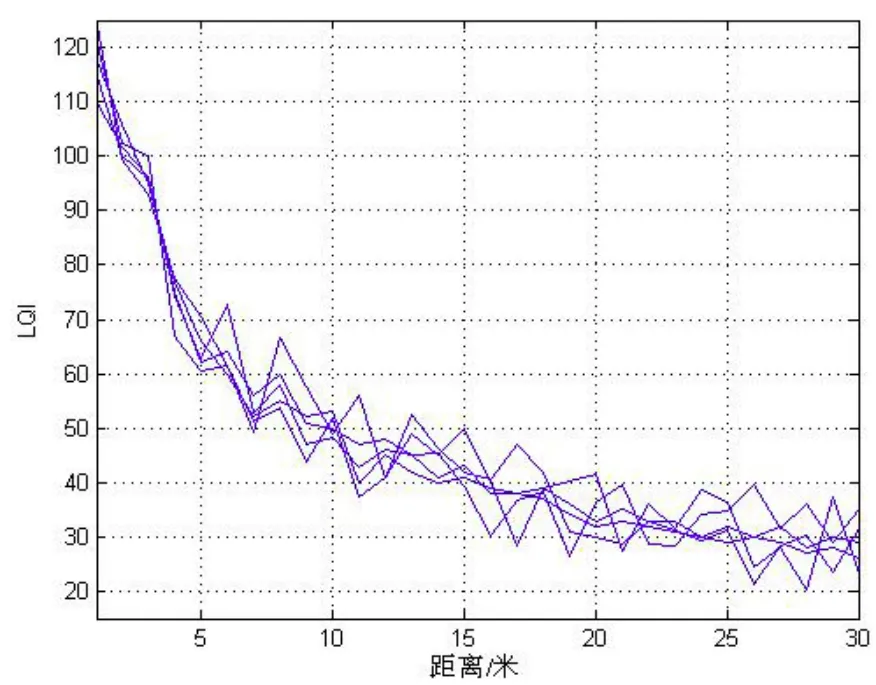
圖6 無障礙環(huán)境LQI統(tǒng)計(jì)圖
由圖-5,圖-6可以看出本文中的ZigBee節(jié)點(diǎn)在0到30米的無障礙視距環(huán)境中,隨著兩個節(jié)點(diǎn)之間距離的增大,信號強(qiáng)度RSSI和鏈路質(zhì)量LQI呈下降趨勢。 通過實(shí)際的測試與總結(jié),當(dāng)兩個節(jié)點(diǎn)相距在30米以內(nèi)時(shí),通信基本可靠與快捷,當(dāng)距離大于30米時(shí),節(jié)點(diǎn)之間經(jīng)常發(fā)生丟包或者綁定斷開的情況,從而影響系統(tǒng)的可靠性和穩(wěn)定性。
在搭建好ZigBee智能家居網(wǎng)絡(luò),實(shí)現(xiàn)Android智能終端的遠(yuǎn)程控制后,將一個ZR設(shè)備安裝到智能小車上,通過智能小車的自動尋跡功能,這個ZG節(jié)點(diǎn)可以在其他ZR節(jié)點(diǎn)出現(xiàn)故障時(shí)修復(fù)故障節(jié)點(diǎn),如果將ZC設(shè)備安裝到智能小車上,則小車可以在很大的范圍內(nèi)收集各個終端節(jié)點(diǎn)的環(huán)境信息。如圖7所示智能居家環(huán)境中,小車能根據(jù)黑線中設(shè)置的任務(wù)點(diǎn)來識別不同的房間,在到達(dá)不同房間后收集環(huán)境信息,也可以在協(xié)調(diào)器和終端節(jié)點(diǎn)之間建立路由,從而使終端節(jié)點(diǎn)可以接收到來自與協(xié)調(diào)器的控制命令,提高了網(wǎng)絡(luò)的可靠性和穩(wěn)定性,擴(kuò)展了網(wǎng)絡(luò)覆蓋范圍。

圖7 智能小車循跡示意圖
5 結(jié)束語
本文在智能家居系統(tǒng)中引入了能夠自動尋跡的智能小車,這樣做的優(yōu)點(diǎn)是:一時(shí)通過智能小車自動尋跡功能,在某些節(jié)點(diǎn)脫離網(wǎng)絡(luò)時(shí),智能小車移動到此節(jié)點(diǎn)和協(xié)調(diào)器之間的位置,在其和協(xié)調(diào)器之間建立中繼路由,提高居家網(wǎng)絡(luò)系統(tǒng)的可靠性和穩(wěn)定性;二是可以在某些星狀網(wǎng)絡(luò)中搭載協(xié)調(diào)器,對網(wǎng)絡(luò)中各個節(jié)點(diǎn)的數(shù)據(jù)進(jìn)行收集,從而在減小網(wǎng)絡(luò)復(fù)雜度的前提下,擁有比較大的網(wǎng)絡(luò)覆蓋范圍。
[1]高小平.中國智能家居的現(xiàn)狀及發(fā)展趨勢[J].低壓電器, 2005,(04):18-21.
[2]易強(qiáng).基于3G和Zigee的智能家居無線傳感器網(wǎng)絡(luò)系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)[D].廣東:廣東工業(yè)大學(xué),2012.
[3]物聯(lián)網(wǎng)智能家居的發(fā)展前景[EB/OL].http://www.cnjj.com/ news/show.php?itemid=6265,2013-06-03.
[4]胡媛媛,鄧世建,王書婧.基于紅外線傳感器的智能尋跡小車設(shè)計(jì)[J].電子設(shè)計(jì)與工程,2011,19(04):141-143.
[5]Z-Stack Developer’s Guide.Texas Instruments.Document Number:SWRA176,2011.
[6]劉建國.基于DRNG的WIA-PA網(wǎng)絡(luò)拓?fù)淇刂蒲芯縖D].重慶:西南大學(xué),2011.
Application of Automatic Guided Vehicle to Improve Stability of Smart Home Systems
LI Ling-xiang LUO Peng
(Computer department,Hunan University of Science and Engineering,Hunan Yongzhou,425199,China)
To address the problem in which the overall performance of a smart home system might be degraded with the instability of its ZigBee network,due to that the area covered by its nodes subject to the impact from environmental factors,this paper proposes the design of a mobile ZigBee node,namely Automatic Guided Vehicle(AGV),which is able to identify different rooms in a smart home and to monitor the home environment,even to collect data from various sensor nodes in the smart home and to repair any fault nodes.Experiments show that an AGV unit in a smart home system reduces the probability of system failure and improves the coverage and stability of the system.
Automatic Guided Vehicle(AGV),ZigBee,Smart Home Syste
TP18,TP183,TB115
A
1673-2219(2014)05-0125-04
2014-02-22
湖南省教育廳科技項(xiàng)目(11C0599, 11C0598),永州市科技局資助項(xiàng)目(永科發(fā)[2012]9號
李玲香(1976-),女,湖南郴州人,講師。研究方向?yàn)闊o線傳感器網(wǎng)絡(luò)、移動通信、信號與信息處理。
(責(zé)任編校:劉志壯)
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
 湖南科技學(xué)院學(xué)報(bào)2014年5期
湖南科技學(xué)院學(xué)報(bào)2014年5期
- 湖南科技學(xué)院學(xué)報(bào)的其它文章
- 基于結(jié)構(gòu)方程模型的農(nóng)民專業(yè)合作社社員信任及影響因素分析——來自湖南省生豬行業(yè)的調(diào)查數(shù)據(jù)
- 城鄉(xiāng)社會管理和服務(wù)體系一體化構(gòu)建研究——以湖南省湘潭市為例
- “大土木”環(huán)境下“土木工程概論”課程教學(xué)與考試改革探討——以湖南科技學(xué)院為例
- 案例教學(xué)法在普通生物學(xué)課程教學(xué)中的應(yīng)用
- 合理化訓(xùn)練體系在體育教學(xué)中的作用
- 高職院校“個性-職業(yè)協(xié)調(diào)發(fā)展”體育教學(xué)模式的理論與實(shí)踐研究