利用矩陣初等變換求二維射影變換
2014-01-13 10:14:44周明旺
宜春學(xué)院學(xué)報(bào)
2014年9期
關(guān)鍵詞:規(guī)范化
周明旺
(連云港師范高等專(zhuān)科學(xué)校 數(shù)學(xué)與信息工程學(xué)院,江蘇 連云港 222006)
二維射影變換是高等幾何的核心內(nèi)容之一,由無(wú)三點(diǎn)共線(xiàn)的四對(duì)對(duì)應(yīng)點(diǎn)唯一確定。然而其射影變換式的求解在教材中采用的是由12 個(gè)線(xiàn)性方程求13 個(gè)未知量比值的方法,計(jì)算量很大。基于上述原因另辟新徑,利用矩陣的初等變換知識(shí)給出了二維射影變換基本定理的一種新證法,進(jìn)而給出二維射影變換的矩陣算法。這樣以來(lái)不單簡(jiǎn)化了計(jì)算,更重要的是對(duì)于密切學(xué)科間的滲透、思想觀(guān)念的更新、思維方法的訓(xùn)練、探究能力的培養(yǎng)等方面起著重要作用。[1]
1 預(yù)備知識(shí)
定義1 設(shè)在點(diǎn)場(chǎng)π 與π/上各建立了齊次射影坐標(biāo)系,x = (x1,x2,x3),x/= (x/1,x/2,x/3)分別是其上點(diǎn)的射影坐標(biāo),如果映射φ:π →π/可以表示成
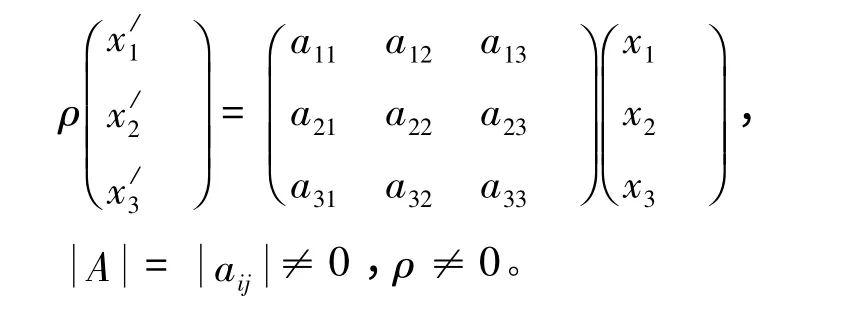
則稱(chēng)φ 是π 到π/的二維射影對(duì)應(yīng)。特別地,若π/= π,則稱(chēng)φ 是π 上的二維射影變換。[2]
引理1 設(shè)A,B,C 為平面上不共線(xiàn)三點(diǎn),其齊次坐標(biāo)分別為a,b,c,則平面上任一點(diǎn)的齊次坐標(biāo)可以表示為la +mb +nc,其中l(wèi),m,n ∈R,且l2+m2+ n2≠0 。[2]
定義2 設(shè)A,B,C,D 為平面上無(wú)三點(diǎn)共線(xiàn)的四點(diǎn),適當(dāng)選取其齊次坐標(biāo)分別為a,b,c,d,若d= a+b+c,則稱(chēng)a,b,c,d 為點(diǎn)A,B,C,D 的規(guī)范化齊次坐標(biāo)。
2 主要結(jié)果

其中l(wèi),m,n ∈R,且lmn ≠0 ,
則la,mb,nc,d 是A,B,C,D 的規(guī)范化齊次坐標(biāo)。
證明:因?yàn)閷?duì)矩陣施行初等行變換不改變列向量的線(xiàn)性關(guān)系。[3]
對(duì)于

即d = la+mb+nc,所以la,mb,nc,d 是A,B,C,D 的規(guī)范化齊次坐標(biāo)。
定理2 射影平面上任意的兩個(gè)四點(diǎn)組(其中各組內(nèi)均無(wú)三點(diǎn)共線(xiàn)),則存在唯一的二維射影變換。[4]
下證A 的存在性與唯一性。
由φ P( )i = P/i,i = 1,2,3,4。則

由引理1,存在全不為零的λ1,λ2,λ3使得P4= λ1P1+ λ2P2+ λ3P3,同理存在全不為零的使得于是
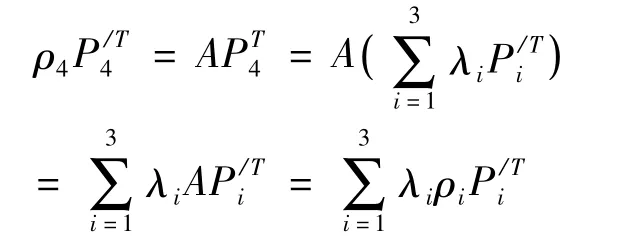

而對(duì)于ρ4的不同取值,結(jié)合點(diǎn)的齊次坐標(biāo)的性質(zhì)知:射影變換是相同的,即射影變換唯一。……
登錄APP查看全文
猜你喜歡
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:29
商周刊(2017年23期)2017-11-24 03:24:09
蘭臺(tái)內(nèi)外(2017年5期)2017-06-06 02:24:19
中外醫(yī)療(2016年15期)2016-12-01 04:25:46
時(shí)代農(nóng)機(jī)(2016年6期)2016-12-01 04:07:29
中國(guó)老區(qū)建設(shè)(2016年9期)2016-02-28 09:34:05
行政事業(yè)資產(chǎn)與財(cái)務(wù)(2015年23期)2015-10-26 03:13:30
中國(guó)衛(wèi)生產(chǎn)業(yè)(2015年10期)2015-03-11 18:58:41
中國(guó)當(dāng)代醫(yī)藥(2015年9期)2015-03-01 02:02:15
中國(guó)衛(wèi)生(2014年3期)2014-11-12 13:18:18
