高動態GPS載波跟蹤組合環路控制策略
2014-01-13 01:52:52雷明東
探測與控制學報 2014年1期
胡 輝,雷明東,李 林,方 玲,徐 健
(華東交通大學信息工程學院,江西 南昌 330013)
0 引言
人們常將應用于導彈、火箭、衛星、航天飛船等航天軍工領域的接收機定義為高動態接收機。在高動態環境下,接收機接收到的信號會具有較高的多普勒及多普勒頻率變化率,這會使GPS接收機對信號的跟蹤產生較大的困難[1]。由于載體的動態在偽碼跟蹤環路上引起的多普勒可以通過載波環的輔助來進行消除,所以對于高動態接收機來說,設計一種性能優越的載波跟蹤環是至關重要的。
常用的載波跟蹤環有鎖頻環(FLL)和鎖相環(PLL),其中FLL 跟蹤的動態范圍較大,但跟蹤精確度不高;而PLL,跟蹤精度較高,但跟蹤的動態范圍較小[2]。針對上述問題,文獻[3-6]提出了先利用FLL將頻率牽引到PLL 的跟蹤門限內,然后再切換到PLL跟蹤的模式,該類復合環較好地解決了對動態的適應性問題,但存在牽引時間不易確定、環路切換頻繁、強制切換造成濾波不連續等缺陷。為了兼顧PLL 和FLL 的特性,文獻[2]提出了FLL輔助PLL 的復合環路結構。在此基礎上,文獻[7-8]為了更好地適應動態性和加快收斂速度,在文獻[2]的基礎上增加了FLL 環路來進行頻率牽引,但是該復合環路也存在切換門限不易確定、環路切換頻繁、濾波不連續等問題。
針對上述問題,本文提出了一種基于頻率牽引和自適應加權技術的載波跟蹤組合環路控制策略。
1 傳統GPS信號跟蹤技術
GPS接收機一般載波跟蹤環如圖1所示,在完成對信號的下變頻、濾波、數字量化后,將中頻數字信號與本地復現的C/A 碼、載波做相關,然后經過積分-清零器形成Ip(k)、Qp(k)兩路值。環路鑒別器利用Ip(k)、Qp(k)得到載波誤差值,將該誤差值濾波去噪后,加載到本地載波NCO 上,產生新的載波信號,從而保持對輸入信號的跟蹤。
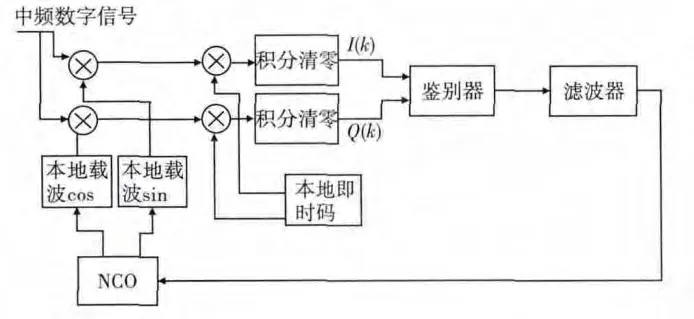
圖1 一般GPS載波跟蹤環路Fig.1 General GPS carrier tracking loop
文中的Ip(k)和Qp(k)兩路信號模型的表達式如下所示:
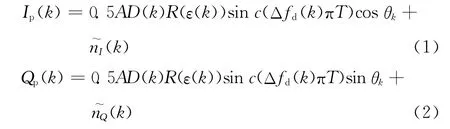
其中A 為信號的幅度,D(k)為導航數據位,Δfd(k)為多普勒殘差,ε(k)為碼相位偏差,T 為預檢積分時間,)和)分別為引進的同相和正交噪聲分量。
而載波跟蹤環路根據選取的鑒別器的不同,常用的載波跟蹤環路有FLL和PLL。當環路的鑒別器被確定后,主要分析的是環路參數對于跟蹤環路的影響。
1.1 鎖相環跟蹤技術
由于導航數據位中存在數據位的跳變PLL 應選取對導航數據位不敏感的Costas環。為了更好地適應動態性,本文特選取鑒相范圍廣的二象限反正切鑒相器,其相關公式和特性曲線參見文獻[10]。PLL環路經驗門限公式可以表示如下:

式中:
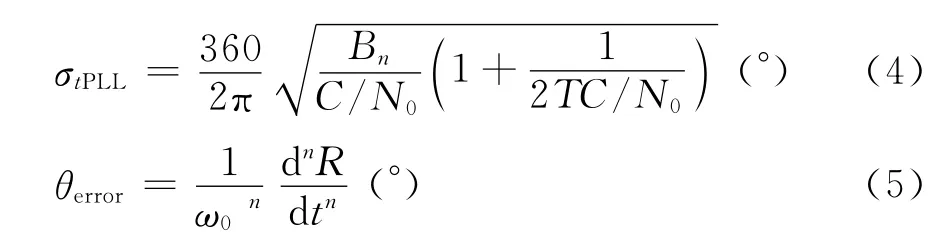
其中σtPLL表示由熱噪聲引起的相位抖動;θerror表示動態應力引起的相位抖動;σv表示由振動引起的振動器顫動;θA表示由阿倫偏差引起的振蕩器顫動;Bn為PLL環路的噪聲帶寬,ω0為環路濾波器的自然圓頻率;T 為預檢積分時間;C/N0為載噪比,由式(4)可知載噪比越高,熱噪聲誤差越小,那么環路能適應的動態應力也相應的提高;表示為視線方向上的動態應力,則d代表最大視線方向上的加加速度應力,其計算公式如下所示:

其中a′為加加速度,fL1為載波的頻率,c為光速。為了更好地適應高動態場景,本文預檢積分時間取值1ms。在對式(3)求導后,可以得到3階PLL環路最佳噪聲帶寬滿足的表達式為[6]:
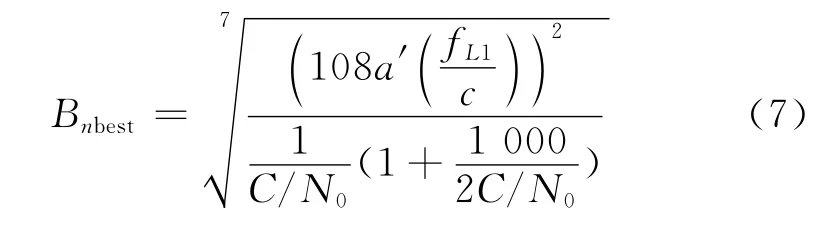
從式(7)可知,在取環路帶寬的時候,要折衷地考慮動態應力、熱噪聲誤差、預檢積分時間之間的關系。
1.2 鎖頻環跟蹤技術
在GPS跟蹤環中常用的鑒頻器主要有3種,其鑒頻公式及特性曲線見文獻[10]。而為了有效地應對加加速度帶來的沖擊,本文復合環特選取鑒頻范圍廣的四象限反正切鑒頻器。FLL 環跟蹤誤差的一般經驗門限取值為:

式中3σtFLL表示FLL熱噪聲頻率顫動,ferror表示FLL環的動態應力誤差,相關的表達式參見文獻[10]。從式(8)可知,減小預檢積分時間T,可以相應的增加動態應力的門限,提高環路對動態的適應能力。在T 取值1ms的情況下,2階FLL環路噪聲帶寬、載噪比、動態應力三者滿足的表達式如下所示:

從上面的分析可以看出,對于FLL和PLL來說,影響其跟蹤性能的主要因素為熱噪聲和載體的動態性,所以對于不同的動態場景,要綜合熱噪聲和動態應力因素的影響,來設計環路中的預檢積分時間T、環路噪聲帶寬Bn。而在本文中,環路使用的為有源比例濾波器,具體的參數設置,可以參見文獻[10]。
2 高動態GPS載波跟蹤組合環路控制策略
2.1 高動態GPS載波跟蹤組合環路控制策略原理
本文提出的高動態GPS載波跟蹤組合環路控制策略原理(后簡稱載波跟蹤組合環路)如圖2所示。載波跟蹤組合環路主要由兩個模塊組成:一個是頻率牽引模塊,另一個為復合環路模塊。為了較好地適應動態性并快速捕獲信號,捕獲算法中預檢積分時間取1ms,頻率井取值為666.67Hz,即捕獲后的最大多普勒頻差將達到333.33Hz,由于頻差較大,先由頻率牽引模塊將頻差牽引到較小的范圍內,然后再利用復合環路實現對信號的精確跟蹤。
而復合環路模塊先利用I、Q 兩路值進行環路的跟蹤狀態判決,輸出控制信號對復合環路中鑒頻器和鑒相器輸出值進行自適應加權,來調節復合環路中FLL和PLL的主導作用,以此形成一個動態載波跟蹤組合環路控制策略。

圖2 載波跟蹤組合環路框圖Fig.2 Block diagram of combination of carrier tracking loop
2.2 頻率牽引模塊
根據鑒頻器的鑒頻特性,本文選擇鑒頻范圍廣的四象限反正切鑒頻器作為頻率牽引模塊中的鑒頻器,頻率牽引模塊的原理圖如圖3所示。
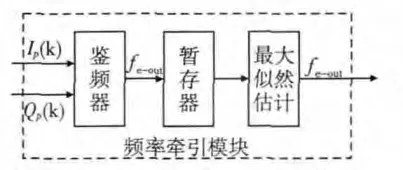
圖3 頻率牽引模塊原理框圖Fig.3 Block diagram of frequency pulling module
由于接收機動態具有隨機性,估計值fe可視為一個變量,而頻率牽引模塊輸出的最終頻率誤差控制量fe_out是對所有觀察量fe的最大似然估計,其計算公式[9]如式(10):

其 中N 為 頻 率 牽 引 階 段 的 觀 測 值 次 數,femax和femin分別是N 次觀測值中的最大值和最小值,在頻率牽引模塊中,為了和捕獲環路相一致,將頻率牽引模塊中的預檢積分時間T 也設置為1ms,那么根據四象限反正切鑒頻器的工作特點,其鑒頻的范圍為±500Hz,可完全覆蓋捕獲后的頻率偏差。
而根據動態場景的不同也應設置觀測次數N的值,其計算公式如式(11)[9]:

其中:Δf=500-333.33≈167Hz為四象限反正切鑒頻器的工作頻差冗余量。fL1為衛星L1波段的載波頻率,a為接收機運動的加速度,C為光速。在本文試驗中的最大加速度為a=150 g,則t牽引≤27.4ms。由于導航數據位的限制,選取t牽引=20 ms,則N =20。
2.3 復合環路模塊
由于在高動態場景下,輸入信號與本地信號的頻差容易超出PLL 環的同步帶,造成失鎖顯現;而FLL環的同步帶和捕獲帶比PLL更寬,但是其精度不如PLL環,所以利用FLL 和PLL 相結合的組合環路是一種較好的解決跟蹤環路對動態適應性、跟蹤精度要求的方法,所以本文復合環路采用2 階FLL輔助3階PLL的結構,復合環路模塊的原理框圖如圖4所示。
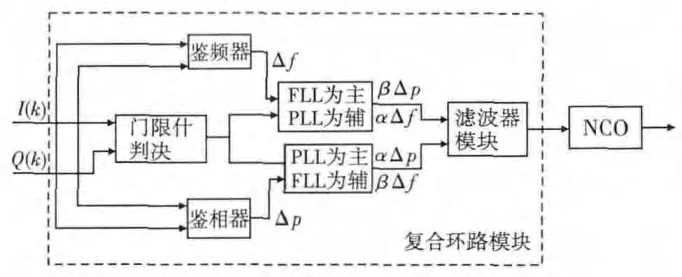
圖4 復合環路模塊原理框圖Fig.4 Block diagram of compound loop module
相比傳統復合環路,文中復合環路先利用判決算法對跟蹤狀態進行粗略的預測(門限值判決),然后利用自適應加權算法對FLL和PLL進行調節。在接收機具有較大動態性的時候,可以通過降低PLL、增加FLL在復合環路中的作用,使得FLL 能快速將輸入信號和本地信號之間的頻差牽引到PLL的快捕帶內,加快復合環路的收斂速度;而接收機在動態性較弱的時候,可以通過增加PLL、降低FLL在復合環路中的作用,來提高環路的跟蹤精度。復合環路模塊中的算法具體如下:
1)門限值判決算法
門限值判決公式如下:

式中Ip(k)、Qp(k)的表達式如式(1)、(2)所示。在環路基本鎖定后,殘余多普勒Δfd趨近于零,此時碼 相 位 誤 差 也 基 本 為 零, 那 么R(ε(k))sinc(Δfd(k)πT)的值趨近于1,在忽略噪聲的影響后,判決式子簡化為:

其中θk為殘余載波相位,如果環路跟蹤穩定后,則θk趨近于零,那么判決式子的值趨近于1。對一般高動態條件下,在忽略弱信號影響的情況下,該算法能粗略地反映出跟蹤環路的跟蹤狀態,從而為后面的自適應權值算法提供加權控制信息。
2)自適應加權算法
①權值因子的選取
在復合環模塊中,設FLL 中鑒頻器輸出值為Δf-d,由分析可知,該值能時刻地反應跟蹤環的跟蹤狀態,如果輸入信號剛結束頻率牽引而進入復合環路時,輸入信號和本地信號還會具有較大的頻差,此時估計值Δf-d會偏大;當環路處于鎖定狀態時,載體突然遭到較大的動態性沖擊,此時輸入信號具有較大的多普勒及多普勒頻率變化率,也會使得估計值Δf-d偏大。而當環路趨于鎖定狀態或者環路已經鎖定,但載體的運動緩和時,此時估計值Δf-d會較小。所以為了對FLL和PLL在不同狀態下的作用進行自適應調節,特選取α、β兩對權值系數如下:
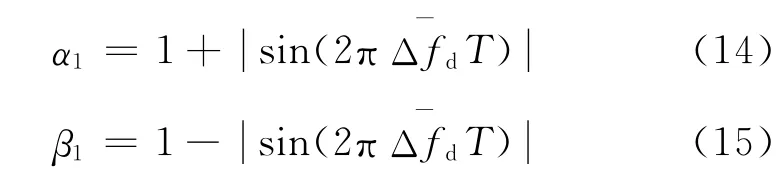
在本文中,接收機的最大加速度a=150 g、a′=±50 g/s,當T 取值為1 ms時,(Hz)。由于sin(x)函數在這個區間上為遞增函數,當Δf-d增加時,α1會隨著增加,而β1 會相應的減小,式中T 為環路的預檢積分時間。
②當判決值Vjudgment小于門限值H 時,說明輸入信號與本地信號頻差還較大,此時復合環需以FLL為主、PLL為輔。對FLL和PLL輸出值進行加權:

如果當判決值Vjudgment大于門限值H 時,說明環路的輸入信號與本地信號的頻差較小,此時主要以PLL工作為主、FLL為輔。對FLL和PLL輸出值進行加權:
③將自適應加權后的ΔF、ΔP 通過濾波器濾波融合后來調整NCO產生新的本地載波信號,從而保持環路對于輸入信號的跟蹤。
3 試驗驗證
為了驗證載波跟蹤組合環路控制策略的性能,本文在環路噪聲帶寬和預檢積分時間設置都相同的情況下,將傳統的2 階FLL 輔助3 階PLL(簡稱FLL/PLL)的復合環與載波跟蹤組合環路控制策略(簡稱F-PLL)在相同動態場景下對GPS信號進行了跟蹤試驗。
1)載體以最大加速度a=-150 g,a′=±50 g/s的加加速度運動的狀態圖如圖5所示。
在綜合考慮了熱噪聲誤差和動態應力的情況下,根據式(7)、式(9),FLL/PLL、F-PLL 兩種復合環路中FLL的帶寬設置為10Hz,PLL的帶寬設置為18Hz,環路對載體運動狀態(1)跟蹤的相關結果圖如圖6-圖11所示。
從圖6、圖7中可以看出,由于F-PLL使用了自適應加權技術,使得環路對于突發的加加速度對環路帶來的沖擊比FLL/PLL能更快地收斂。從圖8、圖9可以看出,F-PLL中鑒相器估計出的相位誤差均值比FLL/PLL小一個數量級,所以相比于FLL/PLL來說精度更高。
從圖10、11 可以看出,FLL/PLL 的I、Q 支路輸出值的離散圖比F-PLL的輸出值更加分散,前者的Q 路值集中于±600之間,而后者的Q 路值集中于±400之間,這說明前者的Q 路信號中除了含有噪聲外還含有大量的信號信息。因此F-PLL 相比于FLL/PLL來說具有更佳的跟蹤性能。
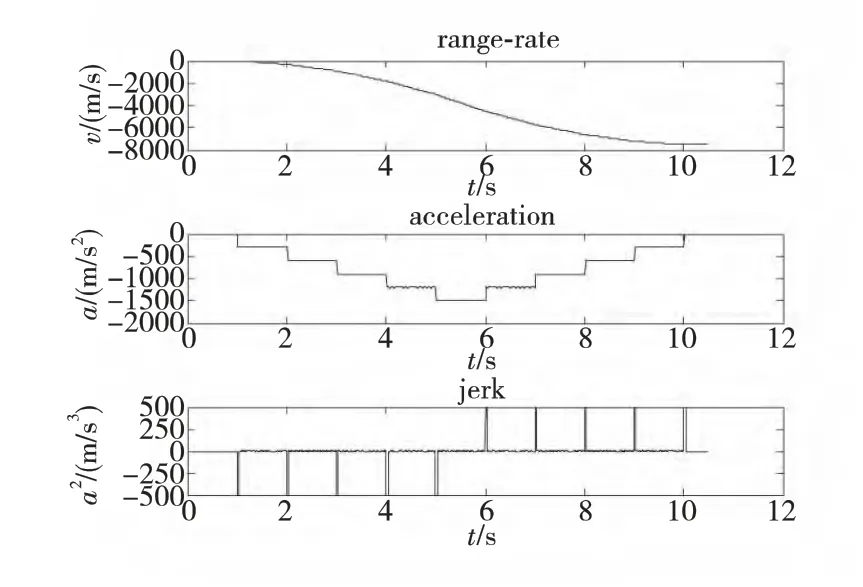
圖5 載體的運動狀態1Fig.5 Carrier state of motion 1
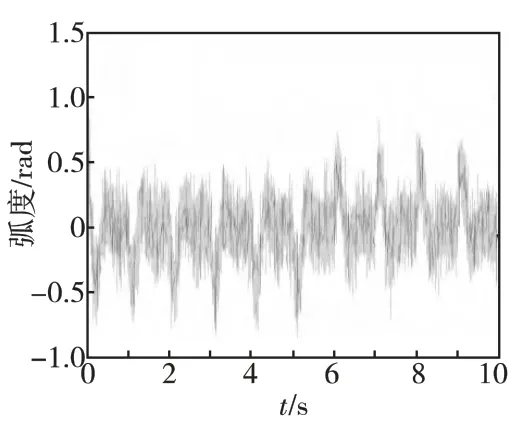
圖6 FLL/PLL中鑒相器輸出值Fig.6 Phase detector output value(without control strategies)
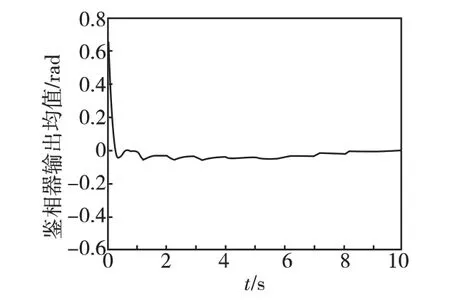
圖8 FLL/PLL中3階PLL環鑒相器輸出均值Fig.8 Output mean of 3-order PLL loop phase detector(without control strategies)
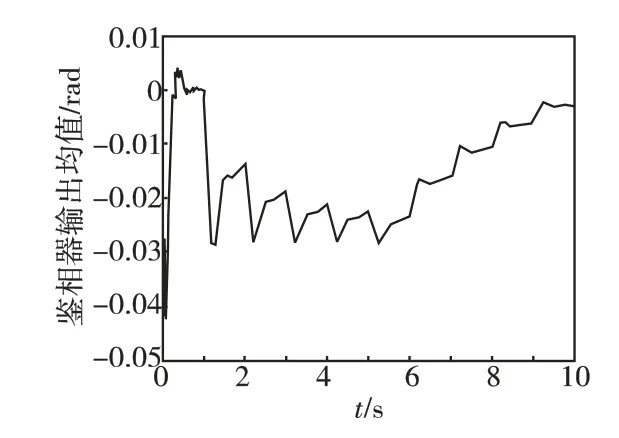
圖9 3階PLL環鑒相器輸出均值Fig.9 3-order PLL loop phase detector(with control strategies)
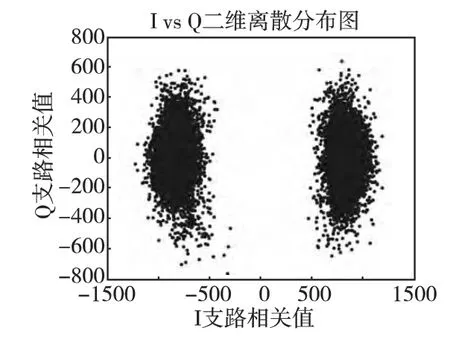
圖10 I、Q 兩路輸出值離散圖Fig.10 I,Q branch discrete figure(without control strategies)
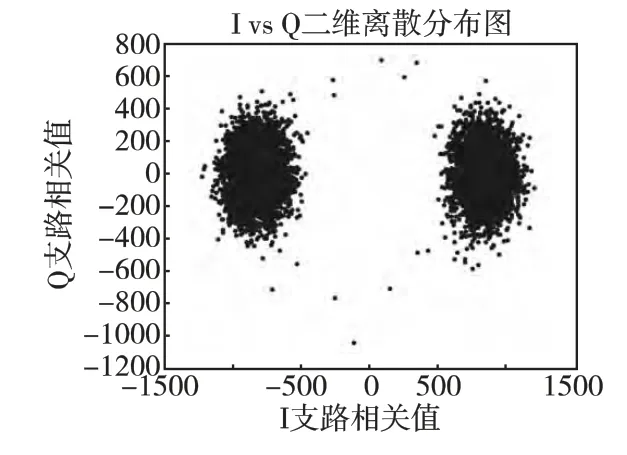
圖11 I、Q 兩路輸出值離散圖Fig.11 I,Q branch discrete figure(with control strategies)
載體以a=150 g 勻加速運動的運動狀態圖如圖12所示。
根據式(7)、式(9),FLL/PLL、F-PLL兩個復合環路中FLL的帶寬設置為10 Hz,PLL 的帶寬設置為15Hz,環路對載體運動狀態(2)跟蹤的相關結果如圖13、圖14所示。從圖13、14可以看出,由于在初始階段,150 g/s的勻加速運動會短暫的帶來較大的沖擊,對于FLL/PLL來說未能跟蹤該信號,而F-PLL在大約200ms后進行收斂,能正確地解算出導航電文,說明F-PLL具有更佳的動態適應性能。
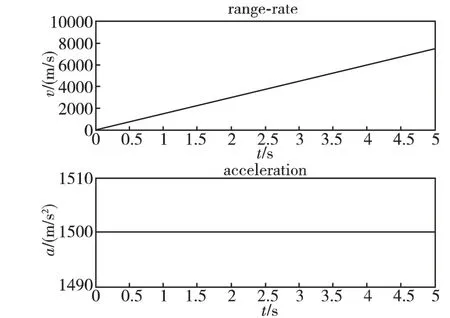
圖12 載體的運動狀態2Fig.12 Carrier state of motion 2
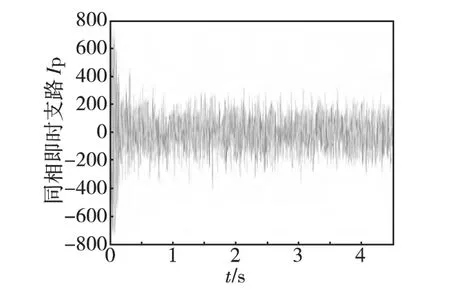
圖13 FLL/PLL環跟蹤后的導航電文信息Fig.13 The output value of the navigation message(without control strategies)
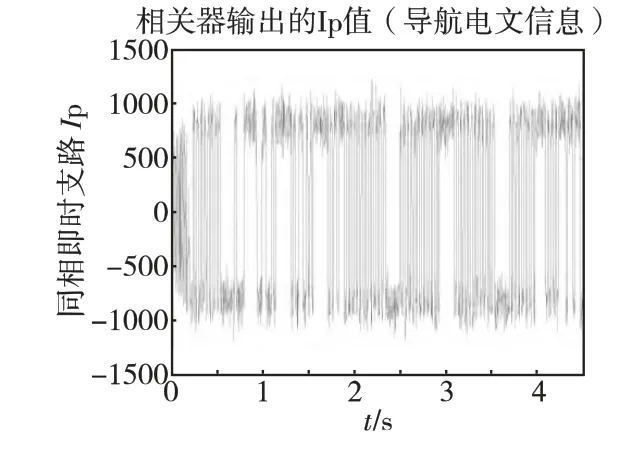
圖14 F-PLL環路跟蹤后的導航電文信息Fig.14 The output value of the navigation message(with control strategies)
從上面的兩組實驗可以看出,基于頻率牽引和自適應加權技術的高動態GPS載波跟蹤組合環路控制策略,能使得復合環路在遇到較大的動態沖擊下,能較快地收斂,具有更佳的跟蹤性能。
4 結論
本文在分析了FLL和PLL跟蹤技術的基本原理及特點的基礎上,提出了一種基于頻率牽引和自適應加權技術的載波跟蹤組合環路控制策略。該策略先通過頻率牽引算法將捕獲后的頻差牽引到較小的范圍內,然后利用帶有跟蹤狀態判決算法來自適應調節FLL 和PLL 主導作用的復合環路對信號進行跟蹤。在對不同高動態運動場景下的GPS信號進行跟蹤仿真試驗后表明,該策略較好地解決了傳統復合環路存在的切換門限不易確定、環路切換頻繁、濾波不連續等問題,具有更好的跟蹤精度和對動態的適應性,載體能在最大加速度a=150 g,最大加加速度a′=50 g/s的動態性指標下正常工作,這為后期開發高性能GPS接收機奠定了基礎。
[1]王偉,張廷新,史平彥.高動態環境下GPS信號跟蹤算法綜述[J].空間電子技術,2000(1):1-9.
[2]Ward P W.Performance comparisons between FLL,PLL and a novel FLL-assisted-PLL carrier tracking loop under RF interference conditions[C]//Proceedings of the 11th International Technical Meeting of the Satellite Division of The Institute of Navigation(ION GPS 1998).US:ION,1998:783-795.
[3]Stefan K,Christian A,Daniel G,et al.GNSS receiver with vector based FLL-assisted PLL carrier tracking loop[C]//ION GNSS 21st international Technical Meeting of the Satellite Division.Savannah CA:The institute of Navigation,2008:197-203.
[4]梁丹丹,張一,張中兆.高動態直擴接收機載波跟蹤技術研究[J].電子技術應用,2005(9):51-53.
[5]田明坤,邵定蓉.高動態GPS接收機的一種設計方案[J].遙測遙控,2002(3):15-20.
[6]沈鋒,徐定杰,薛冰.基于FLL/PLL 相結合的載波跟蹤在導航接收機中的應用[J].中國航海,2004(2):51-54.
[7]羅大成,王仕成,劉志國.一種基于FQFD/FLL/PLL的混合載波跟蹤算法[J].航天控制,2009,27(1):10-14.
[8]羅大成,王仕成,曾洪貴,等.一種GPS 軟件接收機的設計[J].儀器儀表學報,2008,29(9):1856-1861.
[9]胡輝,孫函子,紀兆云.高動態GPS載波跟蹤算法和環路控 制 策 略 研 究[J].宇 航 學 報,2011,32(8):1805-1812.
[10]Kaplan E D,Hegarty C.Understanding GPS:principles and applications[M].London:Artech House Publishers,2005.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
山東冶金(2019年3期)2019-07-10 00:54:04
中國生殖健康(2019年3期)2019-02-01 06:12:26
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00