R-T-S平滑算法在POS數(shù)據(jù)后處理中的應(yīng)用
2013-12-06 08:59:02郝萬(wàn)亮孫付平
測(cè)繪工程 2013年6期
郝萬(wàn)亮,孫付平
(信息工程大學(xué) 測(cè)繪學(xué)院,河南 鄭州 450052)
近年來(lái),POS系統(tǒng)發(fā)展迅速,其在軍事偵察、航空攝影測(cè)量、移動(dòng)測(cè)圖等方面發(fā)揮著越來(lái)越重要的作用。作為一種高精度的定位定姿平臺(tái),POS充分利用DGPS/INS組合導(dǎo)航技術(shù)和一系列的后處理算法,來(lái)獲取平臺(tái)精確的位置和姿態(tài)信息。目前,工程上普遍采用卡爾曼濾波(kalman Filter,KF)對(duì)POS數(shù)據(jù)進(jìn)行處理,但其精度有限,同時(shí)該方法在衛(wèi)星信號(hào)失鎖區(qū)間定位精度不高。加拿大的Applanix公司在其產(chǎn)品中成功應(yīng)用了平滑技術(shù),其具體細(xì)節(jié)未公開(kāi)報(bào)道[1]。本文把反向R-T-S(Rauch-Tung-Streibel)平滑算法應(yīng)用到POS數(shù)據(jù)后處理過(guò)程中,并對(duì)該算法進(jìn)行了仿真分析,結(jié)果表明,該方法不僅能夠大大減小定位定姿誤差,而且在衛(wèi)星信號(hào)失鎖段精度也能大幅提高。
1 POS后處理算法
為了獲取載體精確的位置及姿態(tài)信息,POS系統(tǒng)一般利用GPS差分技術(shù)來(lái)提高精度,例如偽距差分、載波相位差分等,然后再與慣導(dǎo)或里程儀組合,以及利用GPS雙天線來(lái)抑制航向角的發(fā)散,進(jìn)一步提高姿態(tài)精度。一方面GPS信息可以用來(lái)估計(jì)慣導(dǎo)設(shè)備的偏差;另一方面在衛(wèi)星信號(hào)失鎖時(shí),慣導(dǎo)設(shè)備提供的信息可以用來(lái)估計(jì)載體的運(yùn)動(dòng)狀態(tài),從而減小衛(wèi)星信號(hào)重新捕獲所需的時(shí)間[2]。
平滑技術(shù)在POS數(shù)據(jù)后處理中起著重要的作用,理論上可以證明,經(jīng)過(guò)平滑之后的精度比單向卡爾曼濾波精度更高[3]。POS后處理算法結(jié)構(gòu)如圖1所示。
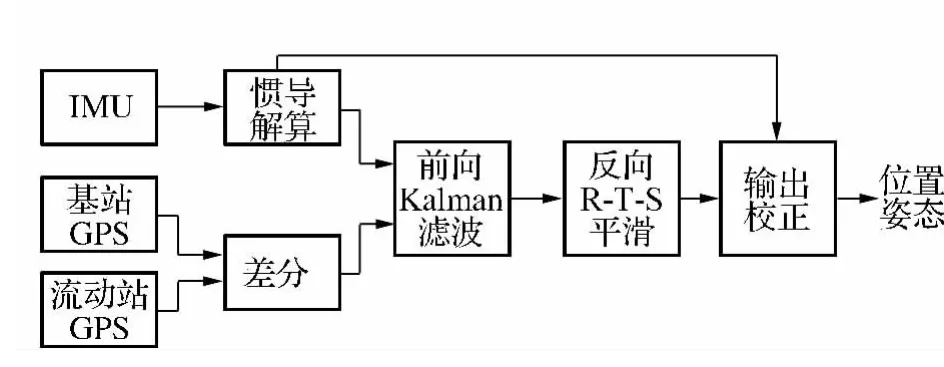
圖1 POS后處理算法結(jié)構(gòu)
POS后處理算法主要包括兩個(gè)過(guò)程:首先利用IMU測(cè)量的加速度、角速度進(jìn)行慣性導(dǎo)航解算,將獲得的位置、速度與經(jīng)過(guò)差分處理的GPS信息同步做差,作為前向Kalman濾波的觀測(cè)量。其次利用前向Kalman濾波過(guò)程中獲得的協(xié)方差陣和狀態(tài)轉(zhuǎn)移矩陣,對(duì)狀態(tài)估計(jì)值進(jìn)行反向R-T-S平滑,根據(jù)平滑結(jié)果對(duì)慣性導(dǎo)航輸出的位置、速度和姿態(tài)進(jìn)行校正,作為POS的最終輸出[4]。
2 平滑技術(shù)
平滑技術(shù)作為事后或準(zhǔn)實(shí)時(shí)數(shù)據(jù)處理的一種方法,可以大大提高數(shù)據(jù)處理的精度,在測(cè)繪領(lǐng)域獲得了廣泛的應(yīng)用。平滑技術(shù)分為3類:固定 區(qū) 間 平 滑(Fixed-Interval Smoothing)、固 定 點(diǎn)平滑(Fixed-Point Smoothing)和 固 定 滯 后 平 滑(Fixed-Lag Smoothing)[5-6]。其 中 固 定 區(qū) 間 平 滑在數(shù)據(jù)后處理中應(yīng)用最為廣泛,其示意圖如圖2所示。它是在前向卡爾曼濾波的基礎(chǔ)上進(jìn)行的反向?yàn)V波,充分利用了區(qū)間內(nèi)所有時(shí)刻的測(cè)量值對(duì)狀態(tài)進(jìn)行估計(jì),該方法能提供比單向?yàn)V波更高的精度,同時(shí)在衛(wèi)星信號(hào)失鎖段也是一種很好的橋接算法。
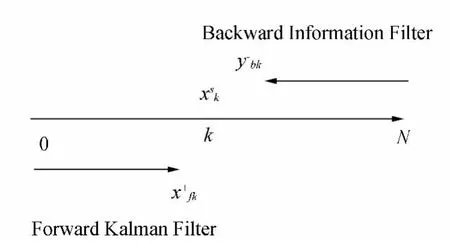
圖2 固定區(qū)間平滑示意圖
3 R-T-S平滑
R-T-S平滑是固定區(qū)間平滑的一種,它是Rauch等人于1965年提出的,該方法計(jì)算簡(jiǎn)單,工程實(shí)現(xiàn)容易,已被證明是一種有效的事后分析算法,可以獲得比卡爾曼濾波精度更高的融合結(jié)果[7]。
R-T-S平滑由前向?yàn)V波和后向?yàn)V波組成,前向?yàn)V波是經(jīng)典的卡爾曼濾波器,用來(lái)估計(jì)每一時(shí)刻的狀態(tài),后向?yàn)V波是在前向?yàn)V波的基礎(chǔ)上獲取更精確的狀態(tài)估計(jì)值[2]。
對(duì)于式(1)的系統(tǒng)模型:
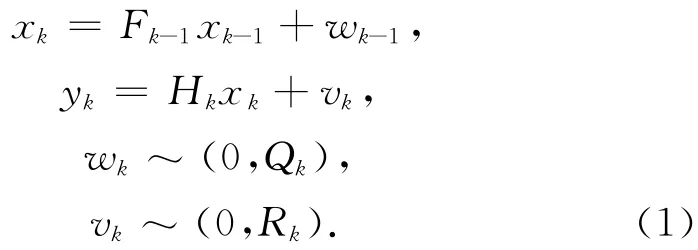
前向卡爾曼濾波估計(jì)的濾波初值

對(duì)于k=1,2,…,m,執(zhí)行下列卡爾曼濾波循環(huán):
從而求得xm的前向估計(jì)值及其協(xié)方差。在前向卡爾曼濾波過(guò)程中存儲(chǔ)實(shí)時(shí)狀態(tài)估計(jì)值、狀態(tài)預(yù)測(cè)值、誤差估計(jì)協(xié)方差陣和預(yù)測(cè)誤差估計(jì)協(xié)方差陣,以及系統(tǒng)的狀態(tài)轉(zhuǎn)移系數(shù)矩陣Fk-1。卡爾曼濾波完成后,利用存儲(chǔ)的數(shù)據(jù)進(jìn)行反向R-T-S平滑處理。

由式(3)可知,R-T-S平滑的公式是由k=N-1到k=0的遞推過(guò)程,Kk為平滑增益,Pk為平滑誤差估計(jì)協(xié)方差陣,是平滑濾波的狀態(tài)變量[5]。通過(guò)R-T-S平滑處理,可以獲得平滑區(qū)間內(nèi)所有時(shí)刻的最佳估計(jì)值。
4 仿真及分析
為驗(yàn)證R-T-S平滑算法在POS數(shù)據(jù)后處理中的效果,進(jìn)行了數(shù)值仿真,仿真條件設(shè)置如下:
1)設(shè)置仿真軌跡如圖2所示,軌跡初始緯度φ=39°,經(jīng)度λ=108°,高度h=100m,初始速度0m/s,加速到100m/s后做勻速飛行。初始姿態(tài)角(0°,0°,0°)。慣導(dǎo)初始位置誤差為(1m,1m,1m),速度誤差(0.1m/s,0.1m/s,0.1m/s),姿態(tài)誤差(100″,100″,300″)。
2)設(shè)陀螺儀常值漂移和隨機(jī)漂移分別為0.1°/h和0.01°/h,加速度計(jì)常值零偏和隨機(jī)零偏分別為100μg和10μg。
3)GPS速度誤差不大于0.1m/s,位置誤差不大于1m。
為驗(yàn)證該算法在衛(wèi)星信號(hào)失鎖區(qū)間的性能,在區(qū)間一(100~160s)、區(qū)間二(400~460s)和區(qū)間三(600~660s)內(nèi)人為屏蔽掉衛(wèi)星信號(hào),如圖3所示。
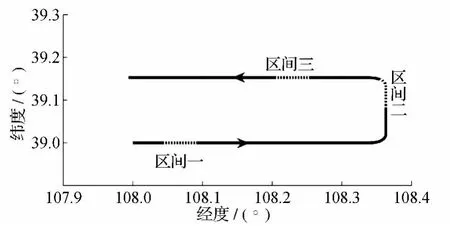
圖3 仿真軌跡
位置和姿態(tài)的仿真結(jié)果如圖4和圖5所示。

圖4 位置誤差
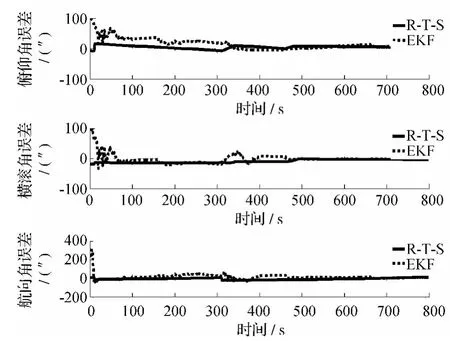
圖5 姿態(tài)誤差
由圖4和圖5可以看出,在前向卡爾曼濾波的基礎(chǔ)上進(jìn)行反向R-T-S平滑,能夠獲得更高的位置和姿態(tài)精度,此效果在衛(wèi)星信號(hào)失鎖段尤其明顯,在人為設(shè)置的3個(gè)衛(wèi)星信號(hào)失鎖區(qū)間的誤差統(tǒng)計(jì)如表1所示。
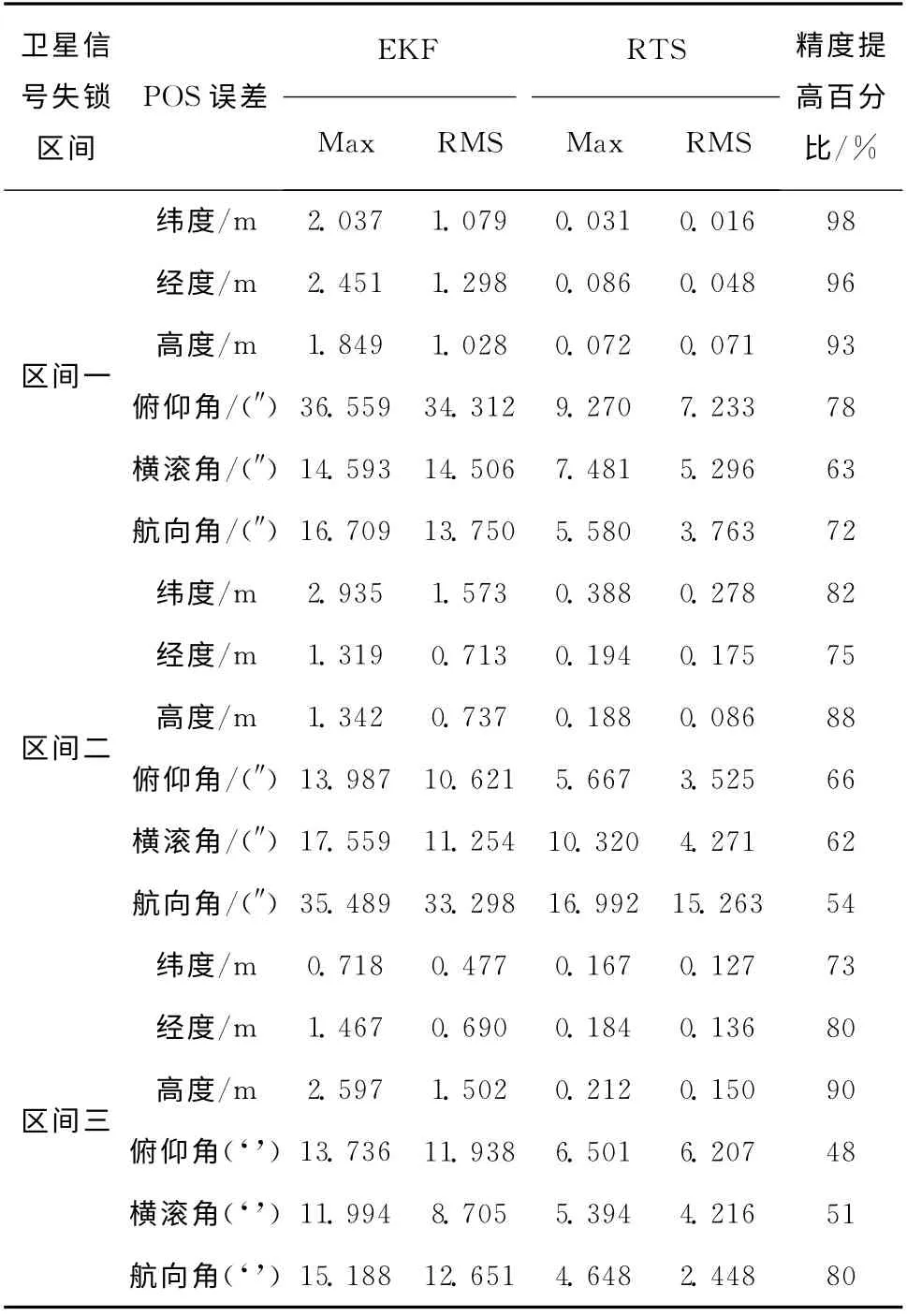
表1 仿真誤差統(tǒng)計(jì)
由表1中的統(tǒng)計(jì)數(shù)據(jù)可知,經(jīng)過(guò)R-T-S平滑處理后的位置和姿態(tài)精度大大提高,在3個(gè)失鎖區(qū)間內(nèi),位置誤差由米級(jí)降為分米級(jí)甚至厘米級(jí),精度能提高80%以上,姿態(tài)誤差也能提高約60%,充分說(shuō)明了該算法作為一種橋接算法的可行性。
5 結(jié) 論
為了獲取高精度的定位定姿數(shù)據(jù),將R-T-S平滑技術(shù)應(yīng)用于POS數(shù)據(jù)后處理中,經(jīng)過(guò)仿真分析表明,與傳統(tǒng)的卡爾曼濾波方法相比,該方法不僅能夠大大提高精度,而且在衛(wèi)星信號(hào)失鎖段也能取得理想的效果。該算法對(duì)于提高POS數(shù)據(jù)的精度,尤其是在衛(wèi)星信號(hào)失鎖的情況下的定位定姿能力,具有重要的意義。
[1]宮曉琳,房建成.基于SVD的R-T-S最優(yōu)平滑在機(jī)載SAR運(yùn)動(dòng)補(bǔ)償POS系統(tǒng)中的應(yīng)用[J].航空學(xué)報(bào),2009,30(2):311-312.
[2]SAMEH NASSAR.Different Algorithms for Bridging Kinematic DGPS Outages using SINS/DGPS Integration[C]//Proceeding of ION GPS2002.Portland,2002:1474-1482.
[3]SAMEH NASSAR.Improving the Inertial Navigation System(INS)Error Model for INS and INS/DGPS Applications[D].Canada:University of Calgary,2003:100-106.
[4]邱宏波,周東靈,李文耀,等.基于閉環(huán)誤差控制器的高精度POS后處理算法研究[J].中國(guó)慣性技術(shù)學(xué)報(bào),2010,18(6):691-695.
[5]ARTHUR GELB.Appplied Optimal Estimation[M].London:The M.I.T Press,1974:157-180.
[6]HANG LIU.Optimal Smoothing Techniques in Aided Inertial Navigation and SurveyingSystems[D].Canada:University of Calgary,2009:55-70.
[7]李睿佳,李榮冰,劉建業(yè),等.衛(wèi)星/慣性組合導(dǎo)航高精度融合算法研究[J].系統(tǒng)仿真學(xué)報(bào),2010,22(1):75-78.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
今日農(nóng)業(yè)(2020年20期)2020-12-15 15:53:19
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
能源(2018年10期)2018-12-08 08:02:48
電子制作(2018年11期)2018-08-04 03:25:42
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
能源(2016年10期)2016-02-28 11:33:30
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28