基于模糊PI 的超聲波電動(dòng)機(jī)頻率追蹤控制
2013-11-22 07:51:32羅辭勇
微特電機(jī) 2013年9期
張 帆,羅辭勇
(重慶大學(xué)輸配電裝備及系統(tǒng)安全與新技術(shù)國家重點(diǎn)實(shí)驗(yàn)室,重慶400044)
0 引 言
超聲波電動(dòng)機(jī)是20 世紀(jì)80 年代發(fā)展起來的一種利用壓電材料逆壓電效應(yīng)的新型微特電機(jī),相比傳統(tǒng)的電磁電動(dòng)機(jī)有快速響應(yīng)、斷電自鎖、無電磁干擾、重量輕、結(jié)構(gòu)緊湊等優(yōu)點(diǎn)。但由于超聲波電動(dòng)機(jī)獨(dú)特結(jié)構(gòu)和運(yùn)動(dòng)機(jī)理,其開環(huán)輸出特性會(huì)隨著環(huán)境溫度、摩擦損耗、預(yù)壓力、驅(qū)動(dòng)器激勵(lì)頻率等因素的變化而變化[1]。
超聲波電動(dòng)機(jī)的控制方法主要有調(diào)壓控制、調(diào)頻控制和調(diào)相控制三種。按控制策略的不同可以分為固定增益的PI 控制、變增益的PI 控制、自適應(yīng)控制、神經(jīng)元控制和模糊控制等[1-2]。本文在TRUM-60 的基礎(chǔ)之上以調(diào)頻控制為方法實(shí)現(xiàn)了超聲波電動(dòng)機(jī)的自動(dòng)追頻控制,為超聲波電動(dòng)機(jī)中的模糊PI 控制設(shè)計(jì)提供借鑒。
1 超聲波電動(dòng)機(jī)的控制系統(tǒng)
圖1 是超聲波電動(dòng)機(jī)模糊PI 控制的系統(tǒng)框圖,其特點(diǎn)如下:
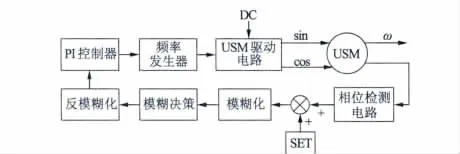
圖1 超聲波電動(dòng)機(jī)模糊PI 控制系統(tǒng)框圖
(1)頻率發(fā)生器控制著USM 驅(qū)動(dòng)電路中輸出的驅(qū)動(dòng)信號(hào)頻率。
(2)USM 驅(qū)動(dòng)電路將低壓直流電源放大并提供匹配電路實(shí)現(xiàn)超聲波電動(dòng)機(jī)驅(qū)動(dòng)信號(hào)高壓高頻的要求,能實(shí)現(xiàn)正反轉(zhuǎn)控制。
(3)相位檢測電路實(shí)現(xiàn)對超聲波電動(dòng)機(jī)運(yùn)行時(shí)的相位檢測。
(4)相位誤差通過模糊計(jì)算對PI 控制器進(jìn)行輸出控制以實(shí)現(xiàn)PI 參數(shù)的變增益控制,最后PI 控制器的輸出實(shí)現(xiàn)對頻率的自動(dòng)跟蹤。
模糊控制的優(yōu)點(diǎn)是不依賴于控制對象精確的數(shù)學(xué)模型,根據(jù)人工控制規(guī)則組織控制決策表,具有一定的靈活性、適應(yīng)性和魯棒性等[1~3],缺點(diǎn)是對經(jīng)驗(yàn)的依賴性較強(qiáng)。
1.1 PI 控制的基本原理
由于積分作用的存在,正弦信號(hào)經(jīng)過PI 控制器后會(huì)發(fā)生四分之一個(gè)周期的延遲,所以PI 控制器構(gòu)成的是滯后校正。PI 控制器可以保證系統(tǒng)的穩(wěn)定精度,但卻是以對快速性的限制來換取系統(tǒng)的穩(wěn)定。
比例參數(shù)KP的作用是加快系統(tǒng)的響應(yīng)速度,提高系統(tǒng)的調(diào)節(jié)精度。隨著KP的增大,系統(tǒng)的響應(yīng)速度越快,調(diào)節(jié)精度越高,但容易產(chǎn)生超調(diào)使系統(tǒng)的穩(wěn)定性變差,甚至不穩(wěn)定。KP過小,調(diào)節(jié)精度低,響應(yīng)速度慢,系統(tǒng)的動(dòng)靜態(tài)性能變壞。
積分作用參數(shù)Ki的主要作用是消除靜態(tài)誤差,并且值越大,系統(tǒng)的穩(wěn)態(tài)誤差消除得越快,但Ki也不能過大,否則在響應(yīng)過程的初期會(huì)產(chǎn)生積分飽和現(xiàn)象。若過小,系統(tǒng)的穩(wěn)態(tài)誤差將難以消除,影響系統(tǒng)的調(diào)節(jié)精度。
1.2 模糊控制的基本原理
模糊控制是一種基于自然語言控制規(guī)則、模糊邏輯推理的計(jì)算機(jī)控制技術(shù),它不依賴于控制系統(tǒng)的數(shù)學(xué)模型,而是從模糊理論給出的有效方法,將語言表達(dá)的知識(shí)或規(guī)則根據(jù)操作經(jīng)驗(yàn)、表述知識(shí)轉(zhuǎn)換成“模糊規(guī)則”的智能控制。
模糊控制器通常包括模糊化、模糊決策、清晰化處理等環(huán)節(jié),根據(jù)模糊規(guī)則推理類型的差異,模糊控制器主要可以分為Mamdani 型和T-S 型兩種控制器,圖2 為模糊控制器設(shè)計(jì)的主要流程圖[3-4]。
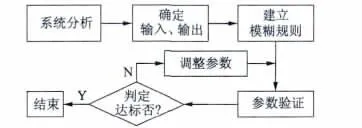
圖2 模糊控制器的設(shè)計(jì)
1.3 模糊PI 控制
模糊控制和PI 控制相結(jié)合的方式目前主要有三種:
分段控制是在誤差較大的時(shí)候采用模糊控制,而在誤差進(jìn)入到一定范圍時(shí)通過切換開關(guān)轉(zhuǎn)換到傳統(tǒng)的PI 控制。
并聯(lián)混合是通過模糊控制和PI 控制并聯(lián)而成的混合型模糊PI 控制器
在線整定PI 控制的參數(shù)是利用模糊控制器在線整定PI 控制器參數(shù)的自適應(yīng)模糊PI 控制器。
PI 控制分為固定增益的PI 控制和變增益的PI控制。固定增益的PI 控制算法簡單,控制器調(diào)整方便,但相對于變增益的PI 控制其控制的性能指標(biāo)如超調(diào)量、控制周期、抗干擾能力等都不如后者。本文所采用的模糊PI 控制是一種變增益的PI 控制,以確定的誤差作為輸入量根據(jù)設(shè)定的模糊規(guī)則,當(dāng)輸入在不同的值域時(shí)有不同的PI 參數(shù)與之對應(yīng),有著良好的控制性能指標(biāo)。
2 模糊PI 在超聲波電動(dòng)機(jī)控制中的設(shè)計(jì)方法
2.1 輸入信號(hào)
本文模糊PI 控制器以實(shí)現(xiàn)超聲波電動(dòng)機(jī)的自動(dòng)追頻為目的,找到超聲波電動(dòng)機(jī)正常工作時(shí)的諧振點(diǎn),以超聲波電動(dòng)機(jī)電流和電壓的相位差為控制器的輸入。
相位差定義:

式中:φset為相位的設(shè)定值,考慮到超聲波電動(dòng)機(jī)的非線性因素[1-2,6-7],在設(shè)定相位的時(shí)候需要考慮溫度給頻率帶來的漂移;φ(t)為實(shí)時(shí)采樣超聲波電動(dòng)機(jī)的相位輸入信號(hào)。
2.2 比例變換
為了使變量按一定的比例進(jìn)行方法或縮小從而對清晰值進(jìn)行比例變換,模糊控制設(shè)有量化因子模塊和比例因子模塊。
輸入到模糊控制器的向量Δφ 是一個(gè)清晰值,經(jīng)過模糊化(D/F)轉(zhuǎn)換,變成模糊量之后才能輸入到模糊推理模塊進(jìn)行推理,把清晰值從物理論域映射到模糊論域N 上的變換系數(shù)就叫做量化因子。
而從模糊論域轉(zhuǎn)換到物理論域的轉(zhuǎn)換系數(shù)稱為比例因子。
2.3 Mamdani 模型
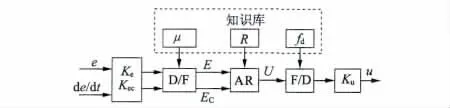
圖3 Mamdani 二維模糊控制器原理圖
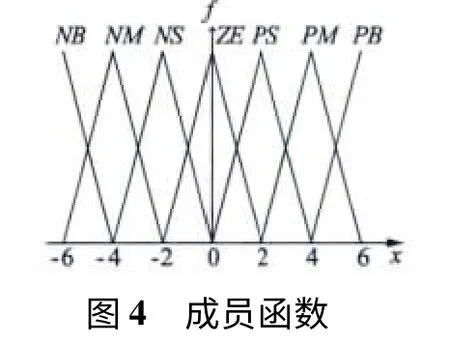
本文選擇的成員函數(shù)為三角形分布函數(shù),如圖4 所示。
3 仿真分析
在上述理論分析的基礎(chǔ)上進(jìn)行了仿真分析與討論,實(shí)驗(yàn)采用超聲波電動(dòng)機(jī)的等效電路模型,首先通過推挽電路將12 V 的直流電源進(jìn)行放大,然后通過交-直-交整流逆變電路對輸出電壓的幅值和頻率進(jìn)行控制,以達(dá)到驅(qū)動(dòng)超聲波電動(dòng)機(jī)的要求。
實(shí)驗(yàn)以自動(dòng)追頻為目的,通過對超聲波電動(dòng)機(jī)電流電壓的相位檢測來計(jì)算相位差e,將這個(gè)e 送入到控制器中,然后通過控制器的輸出對交-直-交整流逆變電路頻率進(jìn)行控制。由于模糊控制是建立在一定的經(jīng)驗(yàn)基礎(chǔ)之上,所以在進(jìn)行模糊PI 控制之前需要做固定增益的PI 控制實(shí)驗(yàn)。
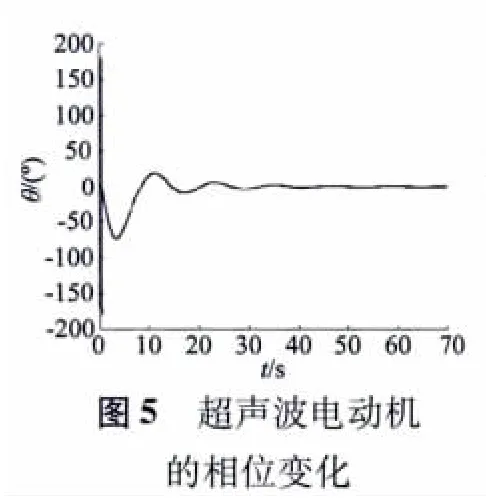
圖5、圖6 分別為固定增益PI 控制的超聲波電動(dòng)機(jī)相位檢測波形和PI 輸出波形。從圖中可見,PI控制的穩(wěn)定時(shí)間約為60 ms,超調(diào)量δ 為30% 左右。
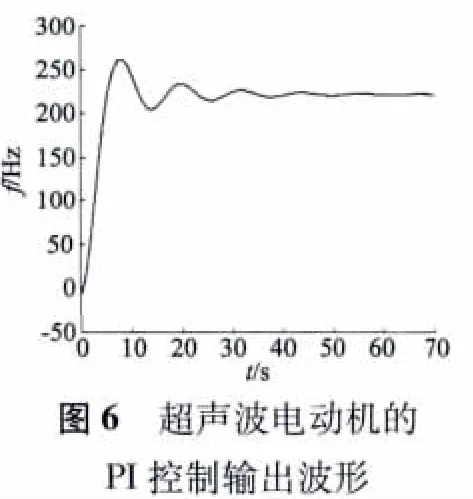
通過固定增益PI 控制的超聲波電動(dòng)機(jī)相位檢測波形和PI 輸出波形的對比,可以累計(jì)一定的經(jīng)驗(yàn)來指導(dǎo)模糊控制。根據(jù)超調(diào)量和控制周期的指標(biāo)要求,可以將圖6 做以下所示的區(qū)間劃分,如圖7 所示。
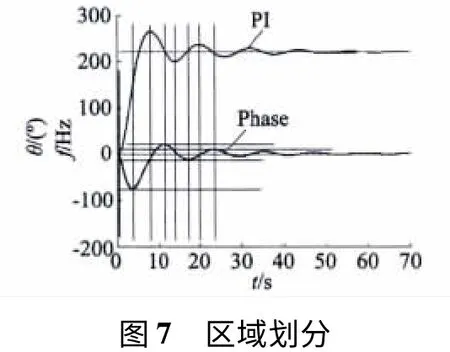
從實(shí)驗(yàn)可以得到,檢測到超聲波電動(dòng)機(jī)相位差的變化區(qū)間為(-75.9°,21.78°),對此數(shù)據(jù)進(jìn)行修正后相位變化的區(qū)間變?yōu)?-77°,21°)。將量化因子的值取為7,相位變化的區(qū)間可以分為14 個(gè)部分,又根據(jù)固定增益PI 的輸出波形,將相位變化的區(qū)間進(jìn)一步劃分為4個(gè)部分,即(-77°,-14°)、(-14°,0)、(0,7°)和(7°,21°)。并且由于相位在瞬時(shí)是波動(dòng)變化的,所以這里的模糊PI 控制不適合根據(jù)相位變化率來設(shè)置模糊規(guī)則,因此得到第一種情況下的“IF-THEN”模糊控制決策,具體模糊數(shù)的設(shè)置如表1 和表2 所示。
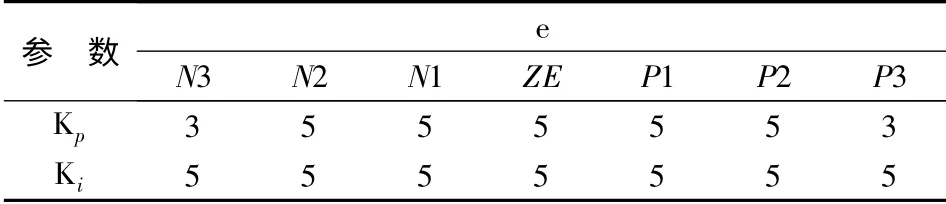
表1 模糊決策1 的模糊數(shù)1
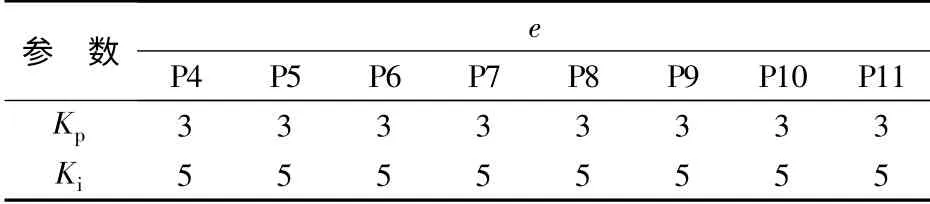
表2 模糊決策1 的模糊數(shù)2
圖8、圖9 分別為在模糊控制決策1 下的相位檢測波形和模糊PI 控制器的輸出波形。經(jīng)過計(jì)算得到當(dāng)超聲波電動(dòng)機(jī)發(fā)生串聯(lián)諧振時(shí)控制器的輸出應(yīng)該為220.1 Hz,所以圖9 中超調(diào)量δ 在52.74% 左右,穩(wěn)定控制時(shí)間t 約為25 ms。在模糊決策1 下的模糊PI 控制器在超調(diào)量上和固定增益的PI 控制器相當(dāng),但在達(dá)到穩(wěn)定的時(shí)間上優(yōu)勢比較明顯,由此體現(xiàn)出了模糊PI 相對于固定增益PI 控制的優(yōu)勢。

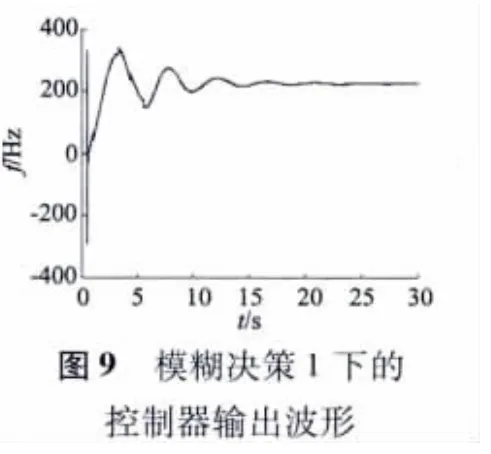
表3 和表4 是在PI 控制的基礎(chǔ)上根據(jù)模糊決策1 改進(jìn)后的模糊決策2,Kp的模糊數(shù)沒有變化,而對Ki的模糊數(shù)進(jìn)行了改變;當(dāng)e 較小時(shí)取較大的Ki;當(dāng)e 處于中等大小時(shí)適中的Ki;當(dāng)e 較大時(shí)可以選擇去掉積分作用。
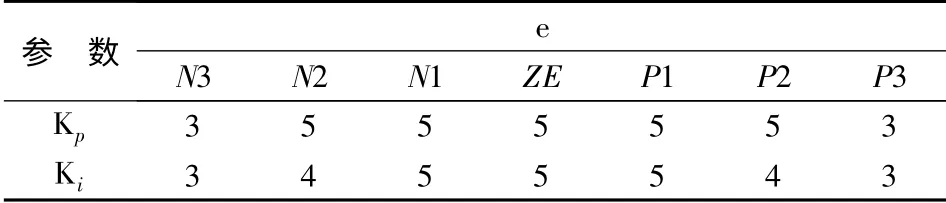
表3 模糊決策2 的模糊數(shù)1
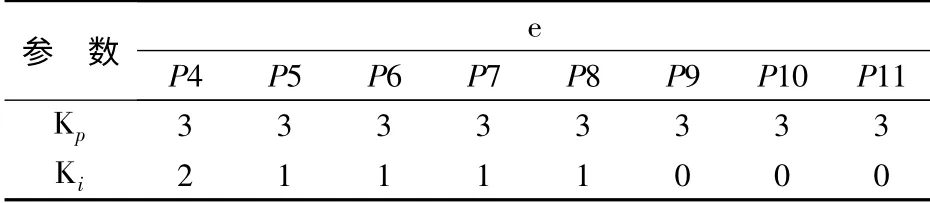
表4 模糊決策2 的模糊數(shù)2
圖10、圖11 分別為在模糊決策2 下的相位檢測波形和模糊PI 控制器的輸出波形。圖11 中輸出波形的最大值為280 Hz,超調(diào)量δ 在27.2% 左右,穩(wěn)定控制時(shí)間t 在22 ms 左右。
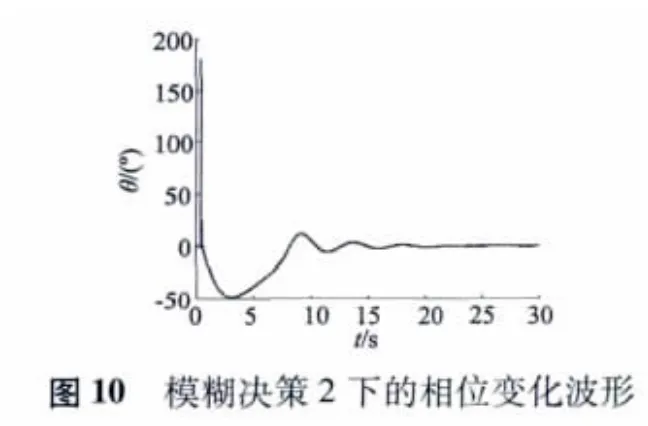
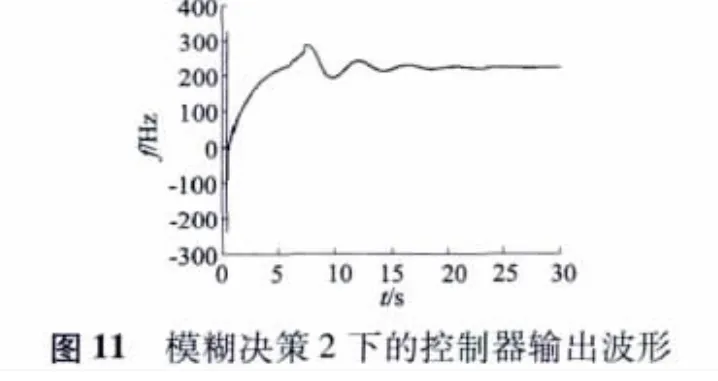
從圖11 中可以看到,在模糊決策2 下的控制波形相當(dāng)于模糊決策1 在超調(diào)量這一性能指標(biāo)上有比較明顯的優(yōu)化。
根據(jù)模糊決策1 和2 的控制效果,希望對模糊決策進(jìn)行改進(jìn),以期望在超調(diào)量δ 和控制時(shí)間t 上獲得更好的控制效果。
表5 和表6 是在PI 控制的基礎(chǔ)之上根據(jù)模糊決策2 改進(jìn)后的模糊決策3,Ki的規(guī)則沒有變化,在對Kp進(jìn)行模糊規(guī)則進(jìn)行了改變:當(dāng)e 較小時(shí)取較大的Kp;當(dāng)e 處于中等大小時(shí)取較小的Kp;當(dāng)e 較大時(shí)取較大的Kp。
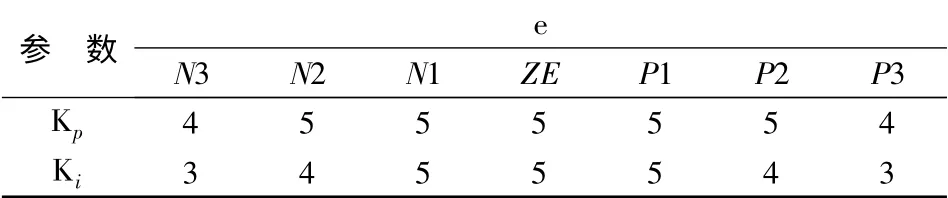
表5 模糊決策3 的模糊數(shù)1

表6 模糊決策3 的模糊數(shù)2
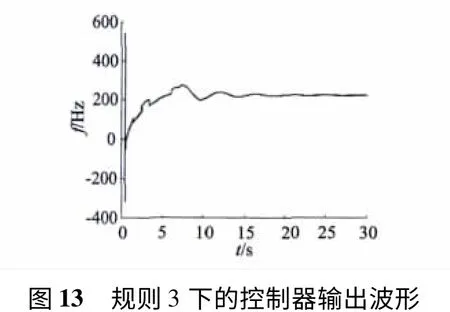
圖12、圖13 分別為模糊控制決策3 下的相位檢測波形和模糊PI 控制器的輸出波形。圖13 中模糊PI 控制器的輸出最大值為272.4 Hz,超調(diào)量δ 約為23.7%,系統(tǒng)到達(dá)穩(wěn)定時(shí)間t 約為19 ms,因此模糊決策3 的控制效果優(yōu)于模糊決策2 并且明顯好于固定增益的PI 控制。

最后,總結(jié)模糊PI 控制器的模糊規(guī)則的設(shè)定規(guī)律:當(dāng)e 較大時(shí),Kp的模糊數(shù)較大,但不得過大,以防止系統(tǒng)進(jìn)入不穩(wěn)定狀態(tài),可去掉積分作用,令Ki的模糊數(shù)為0;當(dāng)e 處于中等大小時(shí),Kp的模糊數(shù)取較小,以減小系統(tǒng)的超調(diào)量,較小的Ki模糊數(shù);當(dāng)e較小時(shí),為了使系統(tǒng)具有較好的穩(wěn)定性,Kp和Ki的模糊數(shù)都應(yīng)取較大值。
4 結(jié) 語
在未獲得超聲波電動(dòng)機(jī)精確數(shù)學(xué)模型的情況下,本文采用了基于固定增益經(jīng)驗(yàn)基礎(chǔ)之上的模糊PI 控制策略,從超調(diào)量δ 和到達(dá)穩(wěn)定的時(shí)間t 兩方面來衡量都取得了很好的效果,系統(tǒng)具有較高的控制精度和較好的穩(wěn)定性,并總結(jié)出了模糊PI 控制器中模糊規(guī)則的規(guī)律,為超聲波電動(dòng)機(jī)模糊PI 控制提供一定的借鑒。
[1] 趙淳生.超聲電機(jī)技術(shù)與應(yīng)用[M].北京:科學(xué)出版社,2007.
[2] 胡敏強(qiáng),金龍,顧菊平.超聲波電機(jī)原理與設(shè)計(jì)[M].北京:科學(xué)出版社,2005.
[3] 夏長亮,徐紹輝,史婷娜,王娟,陳煒.基于遺傳算法的超聲波電機(jī)模糊自適應(yīng)速度控制[J].中國電機(jī)工程學(xué)報(bào),2003,23(3):99-103.
[4] 石辛民,郝整清.模糊控制及其MATLAB 仿真[M].北京:清華大學(xué)出版社,2008.
[5] 周華偉,溫旭輝,趙峰,張劍.一種具有預(yù)測功能的抗積分飽和的PI 速度控制器[J].電機(jī)與控制學(xué)報(bào),2012,16(3):15-21.
[6] 曾勁松,姚志遠(yuǎn),趙淳生.超聲電機(jī)中的非線性現(xiàn)象研究[J].中國機(jī)械工程,2006,17(10):1047-1051.
[7] 王光慶,郭吉豐.超聲波電機(jī)頻率-溫度特性研究[J].電機(jī)與控制學(xué)報(bào),2008,12(6):675-679.
[8] 牛洪海,趙榮祥,吳茂剛.基于模糊PI 參數(shù)自整定的永磁同步電機(jī)矢量控制系統(tǒng)[J].電氣應(yīng)用,2005,24(12):79-82.
[9] 李華峰,王紅占,黃衛(wèi)清.控制量獨(dú)立可調(diào)的超聲電機(jī)新型驅(qū)動(dòng)器[J].電機(jī)與控制學(xué)報(bào),2010,14(9):88-92.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
