基于模糊PI 控制器SRM 的DITC 系統研究
2013-11-22 07:51:32王勉華薛會強
微特電機 2013年9期
王勉華,薛會強
(西安科技大學,陜西西安710054)
0 引 言
開關磁阻電機(以下簡稱SRM)具有結構簡單、工作可靠、起動電流小、起動轉矩高,調速性能優越等特點,在各種工業調速中廣泛應用,成為交、直流調速電機的有力競爭者[1]。但是由于其雙凸極結構使得電機存在非線性,進而產生電機輸出轉矩脈動。因此,如何從控制方法上減小SRM 轉矩脈動已成為目前研究的熱點。目前的控制策略主要有傳統控制策略、神經網絡學習控制、自適應模糊控制、變結構控制、轉矩分配控制、迭代學習控制等。其中文獻[2]中采用BP 神經網絡自適應PID 控制器來調節靜差,但其預測能力和訓練能力的存在矛盾,而且學習精度依賴性高。文獻[3]中提出了模糊PID 控制的調速系統,雖然可以使系統無靜差,魯棒性好,但控制器設計復雜,而且轉矩脈動波動依然較大。
為了克服前面控制方法的不足,本文在分析SRM 特性的基礎上提出了模糊PI 復合控制與直接瞬時轉矩控制相結合的方法來減小轉矩脈動。與傳統方法不同的是,直接瞬時轉矩控制是把任意時刻總的輸出轉矩作為控制量,使每一時刻的瞬時轉矩來跟隨參考轉矩[4-5]。
1 SRM 的直接瞬時轉矩控制系統結構
直接瞬時轉矩控制(以下簡稱DITC)系統主要包括SRM 電機本體、模糊PI 調節器、不對稱功率變換器模塊、轉矩滯環控制器和轉矩估計單元等。系統控制框圖如圖1 所示。本系統采用兩個閉環控制,內閉環是轉矩環控制,作用是對轉矩誤差通過功率變換器來選擇開關狀態,從而控制開關元件的通斷,為電機各相提供所需能量;外閉環采用速度環,作用是對轉速進行調節進而得到內環的參考轉矩給定。
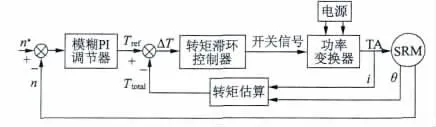
圖1 SRM 的DITC 控制系統框圖
2 SRM 力矩特性分析與控制器設計
DITC 原理是通過比較給定參考轉矩與瞬時轉矩的誤差,在設定的開關角內,控制相繞組上電壓開關狀態來實現控制輸出轉矩的方法。通過下一相優先導通的原則來確定相鄰兩相轉矩的分配規律。
2.1 SRM 的力矩特性分析
SRM 轉矩是磁阻性質,其運行原理遵循 “磁阻最小原理”,因磁場扭曲而產生磁拉力。
在對SRM 性能作定性分析時,若忽略磁路的非線性,則相電流產生電磁的轉矩可簡化:

由上式可知,轉矩方向與電流方向無關,僅取決于電感隨轉角的變化情況。如在電感上升區,相繞組通以電流時產生正轉矩,處于電動機狀態;而在電感下降區,通以電流則產生負轉矩,處于發電機狀態。所以,SRM 起動并連續運行的條件是轉矩為正。在DITC 中,轉矩是直接控制的量,而繞組相電壓選擇是由參考轉矩給定與瞬時轉矩之差決定[7]。而且按導通角的導通相數的不同分為兩相導通和單相導通區域,如圖2 所示。
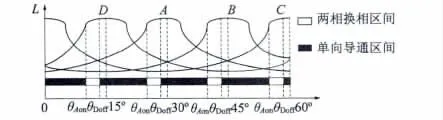
圖2 各相電感與轉子位置角關系
2.2 功率變換器的開關狀態
施加在定子繞組上的空間電壓矢量是由功率變換器的開關狀態所決定的,瞬時轉矩控制要合理選擇的也就是功率變換器開關元件不同通斷狀態下所決定的定子繞組相電壓狀態。本設計功率變換器采用不對稱半橋式結構。開關管有三種狀態:1,0,-1。狀態1:兩個開關管同時導通,為繞組提供上正電壓;狀態0:一個開關管導通,為繞組提供零電壓的續流過程;狀態-1:兩個開關管同時關斷,為繞組提供上負電壓[6]。如圖3 所示。
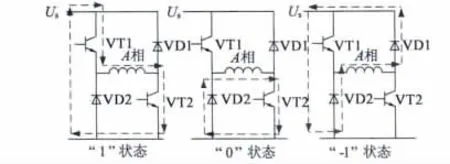
圖3 SRM 開關狀態
2.3 SRM 轉矩滯環的設計
DITC 的核心是滯環控制器的設計。而在不同導通區域內滯環控制器的設計也有所不同,如圖4所示。滯環在單相導通區域,此時有三種開關狀態:1,0,-1。以A 相為例,當瞬時轉矩減小,使轉矩誤差增加并超過ΔT1,則此時相繞組電壓狀態從0 變為1,為A 相提供正相電壓使瞬時轉矩增加。若瞬時轉矩增大,使轉矩誤差減小至-ΔT1,此時開關工作于狀態0,使A 相所加電壓為零,減小瞬時轉矩。
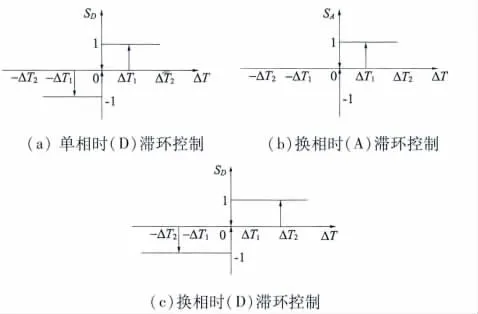
圖4 DITC 轉矩滯環控制器工作原理
兩相同時導通為換相區,此時需內外滯環同時工作。以SRM 從A 相換相至B 相的過程為例。瞬時轉矩為兩相轉矩之和,當轉矩誤差大于0 且增加至區間,則需增加輸出轉矩,此時A、B 相處于狀態0 為續流階段。當轉矩誤差增加至區間ΔT2>ΔT >ΔT1,則B 相繞組要進入狀態1,A 相依然保持續流狀態0。當轉矩誤差增加超過外滯環區間ΔT >ΔT2,此時A、B 相繞組都保持狀態1,來減小輸出轉矩。隨著B 相轉矩的增加,使轉矩誤差小于0,此時需要減小輸出轉矩。但由于B 相即將進入單相導通,則B 相進入續流狀態0 來停止轉矩減小,而A相進入狀態-1 進行退磁磁。以下是分別在單相導通區和換相導通區滯環設計圖[7]。
3 SRM 模糊PI 速度控制器的設計
模糊控制是將輸入量按一定的模糊控制規則自動進行推理運算,比較適宜處理不確定性和不精確性問題,因而具有響應速度快、魯棒性好等特性。而模糊PI 復合控制是在模糊控制的基礎上引入了積分的環節,其結構圖如圖5 所示,當系統誤差較大時采用模糊控制器,當系統誤差小于一定的值,切換到PI 控制器,讓PI 控制器完成系統響應后期的控制工作。這樣可以配合工作保證系統的穩定性,從而改善系統的靜態性能[8]。
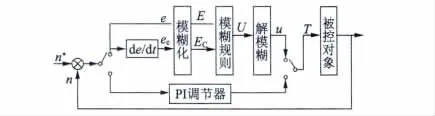
圖5 模糊PI 復合控制結構框圖
3.1 確定模糊控制的量化因子及隸屬函數
本文電機穩定運行在1 000 r/min,因此取速度誤差與速度誤差變化率的基本論域[-1 000,1 000],取參考轉矩的基本論域為[-200,200]。由于電機轉速差范圍較大,為了進一步提高電機調速性能,將偏差變量E、偏差變化率EC及控制量U 的論域均為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},其模糊集反模糊化公式為[9]
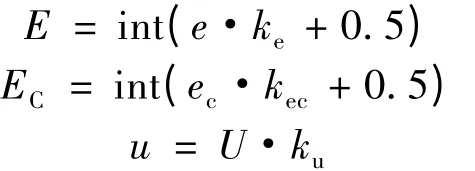
式中:ke= 6 /1 000,kec= 6 /1 000,ku= 200 /6,取隸屬度函數為三角形函數,語言變量的模糊子集為 “負大,負中,負小,零,正小,正中,正大”即{NB,NM,NS,ZE,PS,PM,PB}。
3.2 模糊控制規則與模糊推理
模糊控制規則是基于操作者的經驗和相關專家的知識得出的,本文根據電機控制經驗和大量的模擬仿真,得到了模糊控制規則集,如表l 所示。
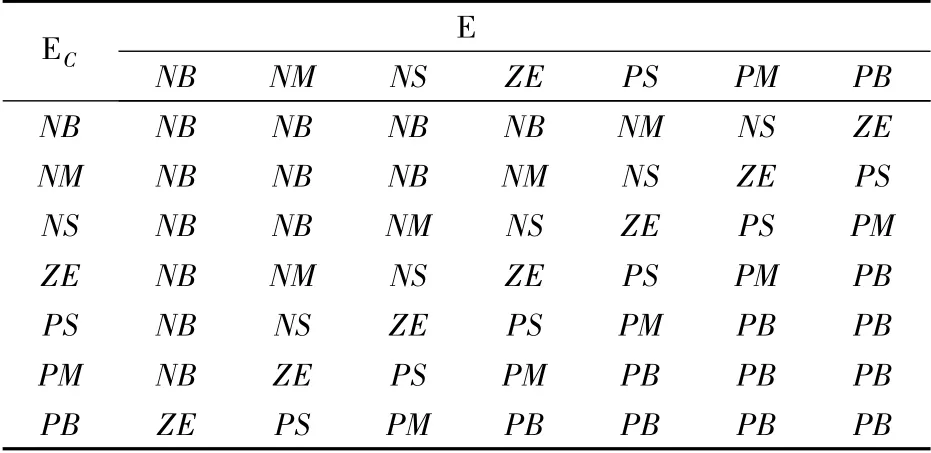
表1 模糊控制量U
模糊推理系統采用Mamdani 類型,即采用如下形式的模糊蘊含關系:If AiAnd Bj,then Cij(其中Ai,Bj,Cij分別表示E,EC和U 的對應語言值)。
4 DITC 系統仿真結果及分析
四相8/6 結構的SRM 的DITC 系統中,導通角設為23°。其中開通角設為32°,關斷角設為55°。給定轉速1 000 r/min,0.4 s 后加入負載轉矩10 N·m,要求電機速度能穩定運行1 000 r/min。圖6、圖7 是模糊控制和PI 控制下的轉矩和轉速波形,圖8、圖9是模糊PI 控制和模糊PI 復合控制下的轉矩波形。

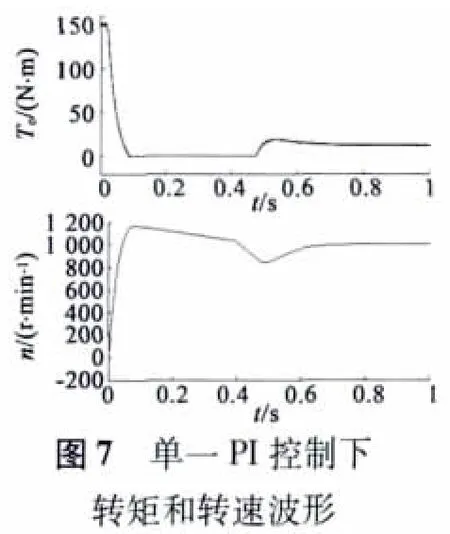
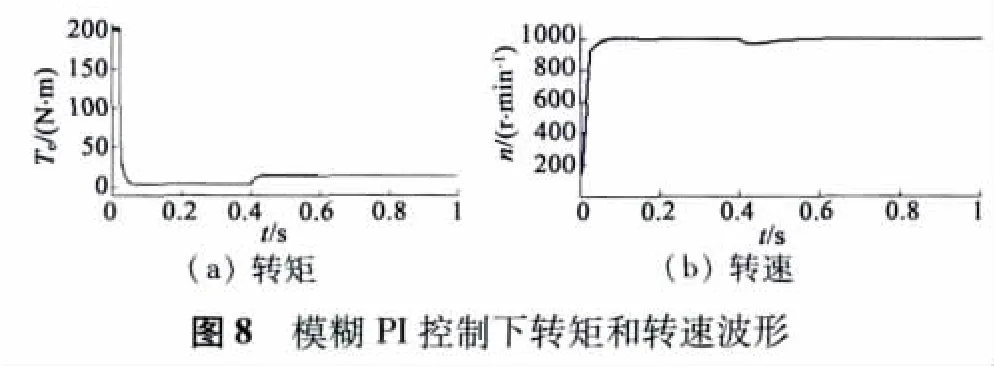
對比圖6、圖7 分析可知,單一模糊控制存在穩態靜差,而復合控制穩態無靜差。
對比圖7、圖8 分析可知,在0.4 s 突加負載后模糊PI 復合控制器具有較好的抗干擾能力,魯棒性好,而且超調較小。
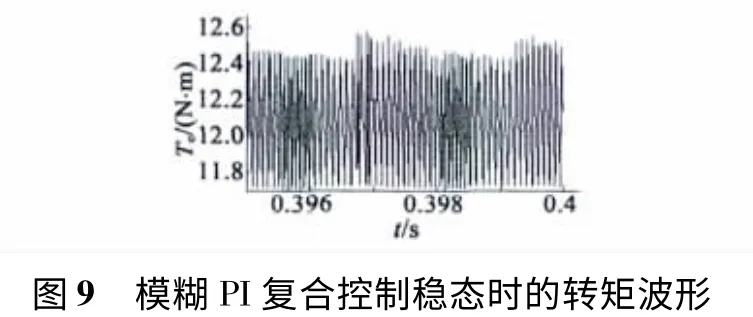
系統穩態輸出轉矩如圖9 所示。通過計算可知,轉矩值在11.7~12.6 N·m 之間波動,其轉矩脈動僅為6.67%,有效減小了SRM 轉矩脈動。
因此模糊PI 控制解決了常規PI 控制器超調量與調節時間的矛盾,同時也解決了單一模糊控制器存在靜差的問題。而且模糊PI 控制使得系統穩態無靜差,系統抗擾性能優越,而且超調小,動靜態性能都優于單一模糊調節器。
5 結 語
本文應用了直接瞬時轉矩控制的方法對SRM進行控制,而且驗證了DITC 方法能夠在一定導通角內能有效改善SRM 的動靜態轉矩性能,減小轉矩脈動。并且本文采用了模糊PI 復合控制,把兩種控制器結合起來,發揮各自優點,取得了較為滿意的結果。仿真結果表明該復合控制器具有良好的動靜態性能,魯棒性好。
[1] 劉迪吉.開關磁阻電機發展及應用[J].電氣技術,2006(07):22 -25.
[2] 夏長亮,陳自然,李斌.基于RBF 神經網絡的開關磁阻電機瞬時轉矩控制[J].中國電機工程學報,2006,26(19):127-132.
[3] 叢望,米芳芳.基于模糊PID 控制的開關磁阻電動機調速系統的建模和仿真[I].船電技術,2008,28(1):39-42.
[4] Inderka R B,De Doncker R W.DITC-direct instantaneous torque control of switched reluctance drives[J].IEEE Transactions Industry Applications,2002,39(4):1046-1051.
[5] 漆漢宏,張婷婷,李珍國,等.基于DITC 的開關磁阻電機轉矩脈動最小化研究[J].電工技術學報,2007(7):136-140.
[6] 漆漢宏,張婷婷,李珍國.基于DITC 的開關磁阻電機轉矩脈動抑制仿真研究[J].系統與仿真學報,2009(10):3133-3138.
[7] 程勇,林輝.直接瞬時轉矩控制策略在開關磁阻電機上的應用[J].航空制造技術,2012(10):88-91.
[8] 王勉華,梁媛媛.開關磁阻電機直接轉矩模糊PI 控制器設計[J].電氣傳動,2010,40(1):51-54.
[9] 張振國,徐建科,江濤,等.開關磁阻電機直接轉矩模糊控制器設計與仿真[J].計算機仿真,2012(9):178-181.
