純電動環衛車整車控制單元的開發
2013-11-05 05:39:34吳明瞭劉曉謙
北京汽車 2013年4期
汪 斌 ,吳明瞭,劉曉謙,李 良,盧 佳
Wang Bin,Wu Mingliao,Liu Xiaoqian,Li Liang,Lu Jia
(東風汽車股份有限公司商品研發院,湖北 武漢 430057)
在國家《電動汽車科技發展“十二五”專項規劃》中,純電動汽車受到了相當大的關注,是國家實現產業升級、技術轉型和科技跨越的必然要求[1]。但限于當前電池技術的發展水平,大規模個人使用純電動車輛還有很多困難。調查發現,政府主導的市政環衛車輛對于純電動車型有相當大需求量,這體現了政府對電動車發展的支持與鼓勵,為推動電動汽車事業向前發展有重要影響。
1 系統結構與功能定義
文中的純電動環衛車采用前置后驅的模式,結構如圖1所示,主要部件包括:整車控制單元、電動機及其控制單元、動力電池包及其管理單元、手動變速器、主減速器、DCDC、電動轉向泵和電動打氣泵等,由于環衛車一般在市內工作,運行條件和充電條件較好,因此該車不設置車載充電機,依靠外接充電。
整車控制單元對駕駛員的加速踏板、換擋等操作進行識別,進而控制車輛的運行,實現整車定義的動力性、經濟性指標,同時實現安全性指標。因此,整車控制單元是整個控制系統的核心[2],具體需要實現的功能及其功能描述列于表1。
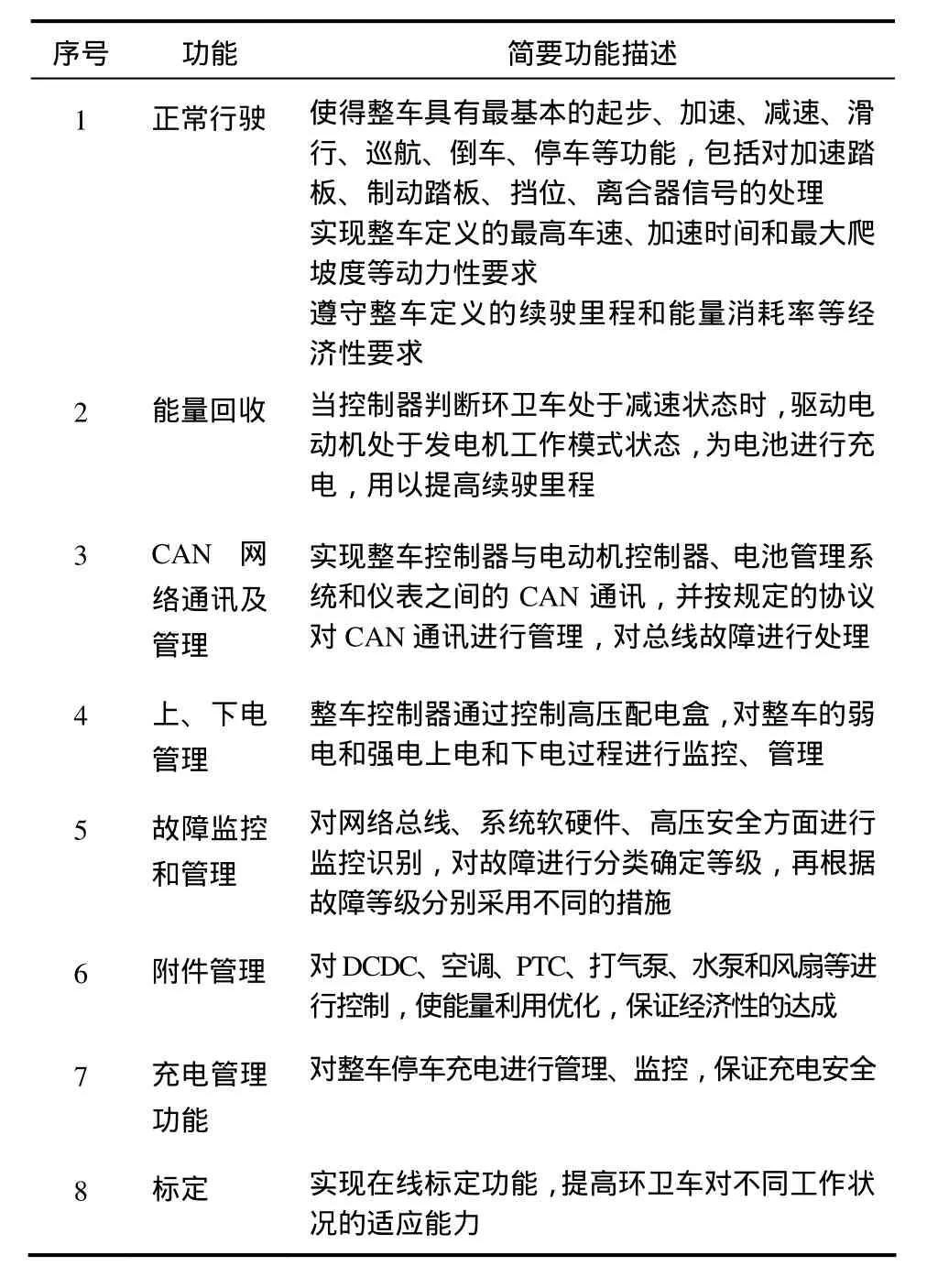
表1 整車控制單元功能定義及簡要描述
2 硬件平臺
根據整車控制單元需要實現的功能設計控制器的硬件,包括:
1)外殼結構設計。需實現整體防護要求達到IP67,為此選用的插接件為ECU專用的成熟產品,防護性能高,且經過實際應用檢驗。
2)電源模塊。控制器設計工作電壓為 DC24 V,電壓適應范圍為DC16~32 V。
3)輸入輸出接口模塊。完成數據采集濾波和控制指令的發出。控制器設計有2路CAN總線,分別用于行車時的數據通信和停車充電時的通訊。為保證數據的可靠傳輸,對需要的地方進行光耦隔離。
4)算法處理單元。這是整車控制單元的核心部分,實現了控制算法的硬件基礎。采用Freescale公司成熟的S12系列16位微處理器,能夠保證算法計算的實時性。
5)電路設計。電路設計除考慮常用需要外,重點應滿足電磁兼容性的要求。
3 軟件設計
控制單元的軟件結構大體分為上層程序和底層程序。其中,上層程序指控制策略的實現部分,是滿足控制功能的核心部分;底層程序主要是對硬件設備進行控制,是控制單元穩定可靠運行的保證。
3.1 上層算法設計
為實現表 1中的功能,控制器軟件將整車工況狀態劃分為多種模式,每種模式都對入口條件進行判斷:軟件根據加速踏板位置、制動踏板位置、擋位、離合器狀態、電動機狀態和電池狀態綜合分析判斷當前整車處于何種狀態。每種狀態下,定義了控制器應當采取的應對措施,產生并發出控制信號。這些控制信號基于整車轉矩控制,同時也限制電動機的運行最高轉速。例如,對正常行駛狀態的判斷是:上電完成,未發駐車信號,未掛空擋,未踩離合器,加速踏板踩下,此時,根據加速踏板開度的大小計算相應的目標轉矩,此轉矩值通過CAN總線發送至電動機控制單元,通過電動機控制單元對電動機電流進行控制。
3.2 底層軟件設計
控制單元的主程序無限循環運行,進入主程序之前,首先需對控制單元的各個端口進行初始化,使其處于正常工作狀態。進入主程序后,通過底層程序采集端口上的信號,并送入主程序中的控制算法進行計算,然后將算法計算所得到的各種控制量通過底層軟件發送出去,傳送給其他執行器的控制單元,實現整車控制。
4 實車道路試驗
實車基本參數列于表2。
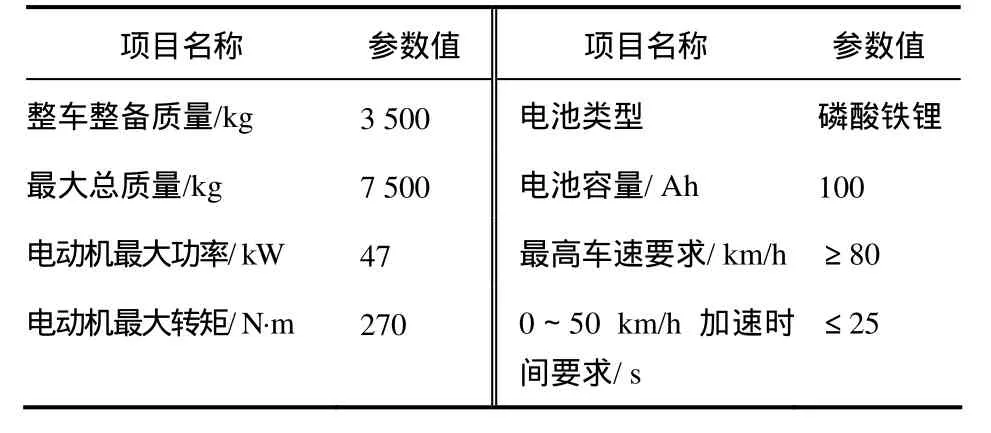
表2 純電動環衛車基本參數
在襄陽試車場進行實車實際道路試驗,累計試驗里程已超過20000 km,整車控制單元各項指標都經受住實際檢驗,安全有效。
5 結束語
針對純電動市政環衛車的使用工況和條件,設計定義了整車控制需要滿足的功能,并實現相應的軟、硬件設計與自主開發,具有自主知識產權。通過實車試車場試驗表明,所開發的控制單元能較好地滿足預定的功能和性能設計目標。
[1]中國科技網. 電動汽車科技發展“十二五”專項規劃(摘要)[EB/OL]. http://www.stdaily.com/,2012-03-03.
[2]羅水平. 純電動汽車整車控制器開發的探討[J]. 海峽科學,2010,(12):64-67.
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
中華詩詞(2022年6期)2022-12-31 06:41:24
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
黃河之聲(2017年13期)2017-01-28 13:30:17
國際漢語學報(2016年1期)2017-01-20 08:21:20
教育界·下旬(2016年4期)2016-11-19 22:15:52
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
