多傳感器信息融合在滾動(dòng)軸承故障診斷中的應(yīng)用
2013-10-22 07:25:56馬文龍呂建新吳虎勝黃炯龍
傳感器與微系統(tǒng) 2013年7期
馬文龍,呂建新,吳虎勝,黃炯龍
(武警工程大學(xué),陜西西安 710086)
0 引言
滾動(dòng)軸承作為旋轉(zhuǎn)機(jī)械的通用部件,在工農(nóng)業(yè)生產(chǎn)、交通等領(lǐng)域的應(yīng)用非常廣泛,它的運(yùn)行狀態(tài)直接影響到整個(gè)機(jī)械設(shè)備的性能、效率和壽命。統(tǒng)計(jì)數(shù)據(jù)顯示:旋轉(zhuǎn)機(jī)械大約30%的故障是由滾動(dòng)軸承故障所引起的。因此,研究滾動(dòng)軸承故障診斷方法具有重要現(xiàn)實(shí)意義。
滾動(dòng)軸承由于制造誤差、裝配原因、阻尼等多種因素影響而產(chǎn)生的振動(dòng)信號(hào)一般是非平穩(wěn)、非線性、非高斯的隨機(jī)信號(hào)。經(jīng)驗(yàn)?zāi)J椒纸猓‥MD)[1]、小波包[2]、局部均值分解(LMD)[3]等時(shí)頻分析方法對(duì)振動(dòng)信號(hào)不同方面的特征具有不同的敏感度,在信號(hào)分析中各具優(yōu)勢,但由于方法本身的局限,也都存在一定缺陷,因此,這3種方法在故障特征提取中都不完善。
多傳感器信息融合[4](有些文獻(xiàn)中也稱為多傳感器數(shù)據(jù)融合)能綜合從多個(gè)傳感器采集到的故障信息,使診斷結(jié)果更加可靠。信息融合按照數(shù)據(jù)抽象的程度一般分為3種:數(shù)據(jù)層融合、特征層融合和決策層融合[5]。分析各層次融合方法的優(yōu)劣,本文選擇采用特征層、決策層相互結(jié)合的信息融合方法。支持向量機(jī)(support vector machines,SVM)相比較其他分類算法來說,在處理小樣本、非線性問題時(shí)更具優(yōu)勢,而且能夠避免局部極值的問題,泛化性能也比較好。因此,本文選擇支持向量機(jī)作為特征層的故障信息融合中心,而決策層融合則采用D-S證據(jù)理論的方法。
1 Dempster-Shafer證據(jù)理論
Dempster-Shafer證據(jù)理論是由Dempster于1976年首先提出,后由Shafer加以擴(kuò)充和發(fā)展,因此,證據(jù)理論又稱為 D-S 理論[6]。
1.1 基本理論
設(shè)U為一識(shí)別框架,m(A)為A的基本概率賦值。表示對(duì)命題A的精確信任程度,也就是對(duì)A的直接支持程度。
信任函數(shù)(belief function)BEL

似真度函數(shù)(plausibility function)PL

規(guī)定的信任區(qū)間(BEL(A),PL(A))描述A的不確定性,如圖1。
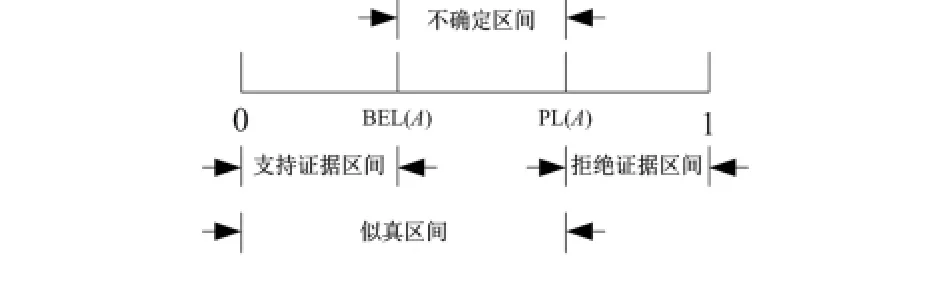
圖1 信任區(qū)間劃分Fig1 Partition of belief interval
1.2 證據(jù)理論的組合規(guī)則
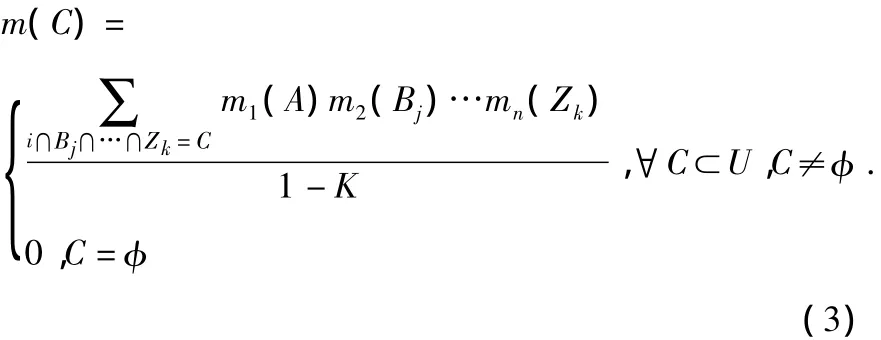
設(shè)m1,m2,…,mn是2U上的n個(gè)相互獨(dú)立的基本概率賦值,通過融合規(guī)則可以求解組合后的基本概率賦值m=m1⊕m2⊕…⊕mn,即
1.3 基于D-S證據(jù)理論的決策
用證據(jù)理論組合證據(jù)后如何進(jìn)行決策是與應(yīng)用密切相關(guān)的問題。考慮到滾動(dòng)軸承故障的分布特點(diǎn),本文決定采用基于概率賦值的決策。
設(shè)?A1,A2?U,滿足

若有
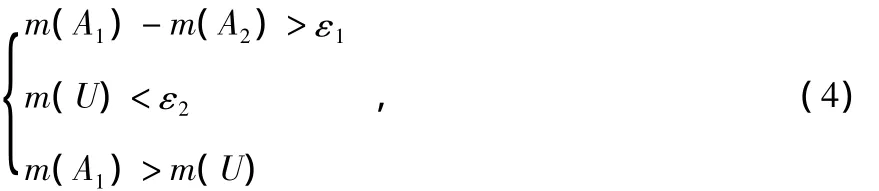
則A1即為判決結(jié)果,其中,ε1,ε2為預(yù)先設(shè)定的門限。
2 SVM后驗(yàn)概率輸出
傳統(tǒng)的SVM[7]在進(jìn)行故障判別時(shí),只能確定是否發(fā)生故障,即只有確定的2種分類輸出[8]。然而,故障診斷逐步向融合診斷方向發(fā)展,簡單地判斷是否有故障,不僅不符合復(fù)雜裝備的實(shí)際情況,而且嚴(yán)重限制了診斷精度的進(jìn)一步提升。
Platt提出將后驗(yàn)概率看做是Sigmoid函數(shù)的形式,然后采用最大似然估計(jì)準(zhǔn)則,求出函數(shù)的參數(shù)[9]。
2.1 二分類SVM后驗(yàn)概率輸出
SVM的標(biāo)準(zhǔn)輸出為

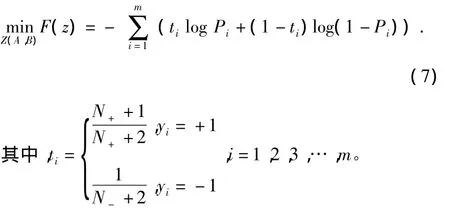
采用sigmoid函數(shù),將SVM的輸出f(x)映射到[0,1],給出了SVM的后驗(yàn)概率輸出形式[10]

參數(shù)估計(jì)值為z*=(A*,B*),正樣本數(shù)用N+表示,負(fù)樣本數(shù)用N-表示,參數(shù)A和B可由最大似然估計(jì)準(zhǔn)則求出
對(duì)于多分類SVM,則采用“投票法”對(duì)多個(gè)二分類SVM的結(jié)果進(jìn)行融合。
2.2 SVM與D-S證據(jù)理論的結(jié)合
采用證據(jù)融合理論進(jìn)行決策層融合,首要的問題是要確定D-S理論識(shí)別框架的基本概率分配(basic probability assignment,BPA)值。
一般用訓(xùn)練樣本中平均的支持向量占總訓(xùn)練樣本數(shù)的比例[11]來得樣本分類錯(cuò)誤率的期望上界

式中N為訓(xùn)練樣本的總數(shù)為支持向量個(gè)數(shù)的平均值。
采用下述方法分配二元SVM的BPA
這樣就可以實(shí)現(xiàn)一個(gè)二元SVM的BPA輸出。多分類SVM的BPA輸出參照二分類SVM的BPA輸出得到。
3 多層信息融合故障診斷模型構(gòu)建
本文在綜合分析多傳感器各層次信息融合方法優(yōu)劣的基礎(chǔ)上構(gòu)建了特征層、決策層兩級(jí)融合診斷的模型。特征層、決策層兩級(jí)融合的故障診斷模型如圖2所示。
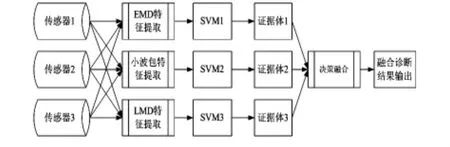
圖2 兩級(jí)融合的集成故障診斷模型Fig 2 Integrated fault diagnosis model of two level fusions
信息融合故障診斷過程一般包含3個(gè)步驟:數(shù)據(jù)處理、模式識(shí)別、融合診斷。其中,數(shù)據(jù)處理階段采用EMD、小波包和LMD的方法對(duì)傳感器采集到的振動(dòng)信號(hào)進(jìn)行處理;模式識(shí)別階段采用SVM分類方法構(gòu)建故障分類器,并以后驗(yàn)概率作為分類器的輸出;決策階段則采用D-S理論進(jìn)行融合診斷,并依據(jù)一定的判別準(zhǔn)則,得到?jīng)Q策結(jié)果并輸出。
從信息融合的意義上講,SVM屬于特征級(jí)融合中的特征輸入/決策輸出過程。而 D-S證據(jù)理論是通過對(duì)同一識(shí)別框架上的各證據(jù)體進(jìn)行融合推理,屬于決策級(jí)融合中的決策輸入/決策輸出過程。兩級(jí)融合的診斷模型能夠發(fā)揮出各層融合方法的優(yōu)勢,提高診斷的準(zhǔn)確性和可靠性。
4 實(shí)例分析
本文采用美國Case Western Reserve University電氣工程實(shí)驗(yàn)室的滾動(dòng)軸承試驗(yàn)數(shù)據(jù)來例證本文方法的有效性。測試軸承為6205—2RS JEM SKF深溝球軸承,電機(jī)負(fù)載為0 HP,軸承工作轉(zhuǎn)速為1797 r/min,故障設(shè)置為內(nèi)圈單點(diǎn)電蝕,外圈單點(diǎn)電蝕和滾動(dòng)體單點(diǎn)電蝕,增加正常情況,總共采集4種狀態(tài)的振動(dòng)信號(hào)。采樣頻率為12 kHz,分析中,每種狀態(tài)截取80組數(shù)據(jù),數(shù)據(jù)樣本長度為2048。
4.1 SVM分類器構(gòu)建
對(duì)原始信號(hào)進(jìn)行降噪預(yù)處理,以軸承內(nèi)圈故障信號(hào)為例,選取sym8小波作為降噪用小波,對(duì)信號(hào)進(jìn)行3層小波分解與重構(gòu)。從降噪前后波形圖顯示降噪后的信號(hào)光滑,與原始信號(hào)很相似,既去除了部分噪聲又較好地保留了故障信息。降噪前后波形對(duì)比如圖3所示。
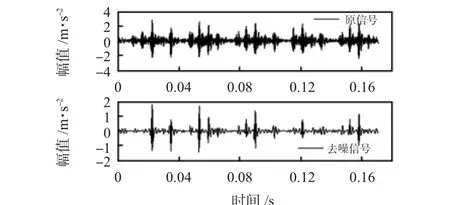
圖3 降噪前后波形對(duì)比Fig 3 Waveform comparison before and after noise reduction
采用EMD、小波包分解、LMD分別對(duì)去噪信號(hào)進(jìn)行處理,并提取特征向量。對(duì)3種振動(dòng)信號(hào)處理方法得到的數(shù)據(jù),各取60個(gè)樣本,組成訓(xùn)練樣本集。每一個(gè)樣本集經(jīng)過訓(xùn)練之后,分別得到一個(gè)支持向量機(jī)故障分類器,分別記為:SVM1,SVM2,SVM3。由于篇幅所限,故障特征提取和支持向量機(jī)分類器的訓(xùn)練不做過多敘述。
4.2 故障融合診斷
試驗(yàn)時(shí),采集3只傳感器的振動(dòng)信號(hào),采用上述3種方法分別對(duì)振動(dòng)信號(hào)處理,并提取特征向量,然后輸入SVM分類器。部分分類識(shí)別結(jié)果如表1所示。
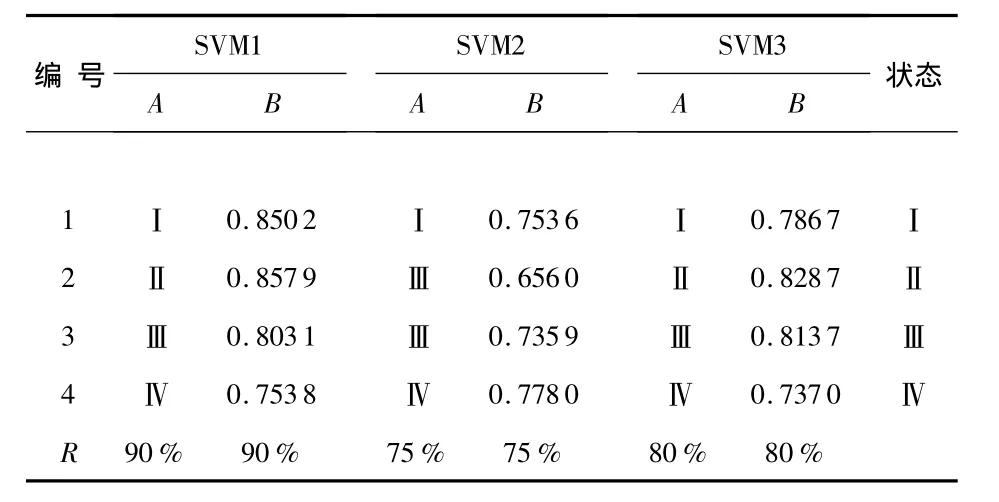
表1 特征層診斷識(shí)別結(jié)果Tab 1 Result of feature layer diagnosis recognition
判決結(jié)果Ⅰ表示正常,Ⅱ表示內(nèi)圈故障,Ⅲ表示外圈故障,Ⅳ表示滾動(dòng)體故障。從判決結(jié)果來看,3種方法都能實(shí)現(xiàn)滾動(dòng)軸承故障診斷,然而識(shí)別正確率不高,甚至SVM2出現(xiàn)了錯(cuò)誤識(shí)別。比較后驗(yàn)概率和硬判決,后驗(yàn)概率并沒有提高識(shí)別正確率,再次驗(yàn)證了本文第2節(jié)的觀點(diǎn)。
根據(jù)2.2節(jié)介紹的方法,可以將表1中,各分類器的概率輸出轉(zhuǎn)換為后驗(yàn)概率的BPA輸出,即證據(jù)體。部分證據(jù)體如表2所示。
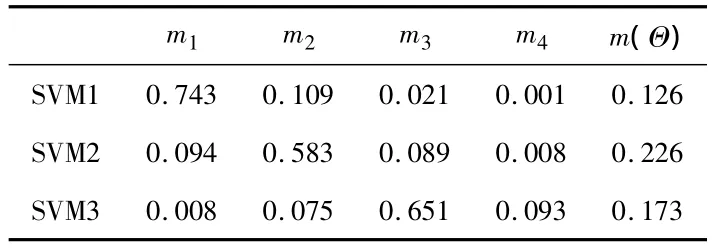
表2 部分后驗(yàn)概率BPA輸出Tab 2 Part of BPA output of posterior probability
得到證據(jù)體后,按照證據(jù)融合規(guī)則進(jìn)行融合計(jì)算。判決時(shí)采用1.3節(jié)的判決規(guī)則進(jìn)行判決。其中,ε1取值為0.0001,ε2取值為0.0001。部分判決結(jié)果如表3所示。
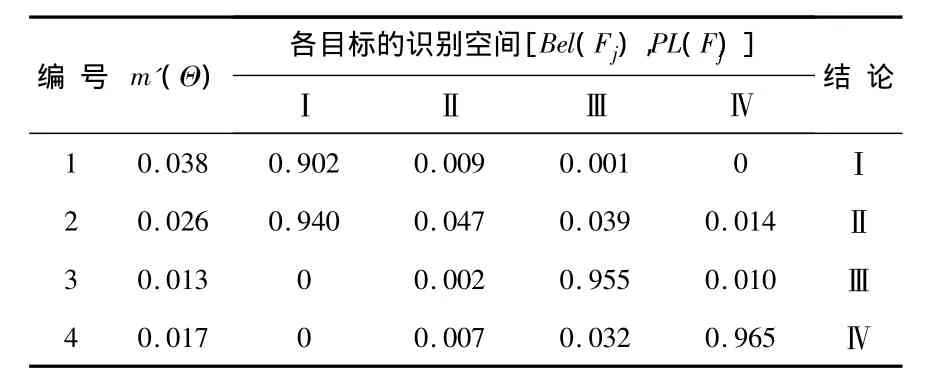
表3 決策層融合診斷結(jié)果Tab 3 Result of decision-making layer fusion diagnosis
對(duì)比表1和表3,故障識(shí)別正確率明顯提高,不確定度明顯下降。對(duì)于表1中出現(xiàn)的錯(cuò)分樣本的情況,經(jīng)過決策融合,也能給出正確診斷結(jié)果。
5 結(jié)論
本文采用特征層、決策層相結(jié)合的信息融合方法,成功實(shí)現(xiàn)了滾動(dòng)軸承故障的診斷。主要結(jié)論有:
1)EMD、小波包和LMD在分析振動(dòng)信號(hào)方面各有優(yōu)勢,融合診斷方法能夠發(fā)揮它們對(duì)不同特征的敏感性,有利于充分發(fā)掘故障信號(hào)的特征。
2)兩層信息融合診斷方法,結(jié)合不同傳感器對(duì)故障的判斷,能夠有效提高滾動(dòng)軸承的故障識(shí)別率,對(duì)于其它設(shè)備故障診斷具有一定借鑒意義。
3)融合診斷方法提高了診斷系統(tǒng)的可靠性和容錯(cuò)能力,即使單個(gè)傳感器診斷出現(xiàn)差錯(cuò)時(shí),系統(tǒng)也能給出較為合理的診斷結(jié)論。
[1] 于德介,程軍圣,楊 宇.基于EMD和AR模型的滾動(dòng)軸承故障診斷方法[J].振動(dòng)工程學(xué)報(bào),2004,17(9):332-335.
[2] 王冬云,張文志.基于小波包變換的滾動(dòng)軸承故障診斷[J].中國機(jī)械工程學(xué)報(bào),2012,23(3):295-298.
[3] 史美麗.基于LMD的滾動(dòng)軸承故障診斷研究[D].長沙:湖南大學(xué),2011.
[4] 黃漫國,樊尚春,鄭德智,等,多傳感器數(shù)據(jù)融合技術(shù)研究進(jìn)展[J].傳感器與微系統(tǒng),2012,29(3):5-8.
[5] 何 友.多傳感器信息融合及應(yīng)用[M].2版.北京:電子工業(yè)出版社,2007.
[6] Bogler P L,Shafer-Dempster reasoning with applications to multisensor target identification system[J].IEEE Trans on Systems,Man and Cybernetics,1987,17(3):968-977.
[7] 張金敏,翟玉千,王思明.小波分解和最小二乘支持向量機(jī)的風(fēng)機(jī)齒輪箱故障診斷[J].傳感器與微系統(tǒng),2011,30(1):41-43.
[8] 杜京義,侯媛彬.基于最小風(fēng)險(xiǎn)的SVM及其在故障診斷中的應(yīng)用[J].振動(dòng)、測試與診斷,2006,26(2):108-159.
[9] Platt John C.Advances in large margin classifier[M].Cambridge:MIT Press,2000.
[10] Lin Hsuan-tien,Lin Chi-jen,Weng Ruby C.A note on Platt’s probabilistic outputs for support vector machines[J].Mach Learn,2007,68:267-276.
[11]邊肇祺,張學(xué)工.模式識(shí)別[M].北京:清華大學(xué),2000.
猜你喜歡
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測試與診斷(2014年5期)2014-03-01 01:14:21
