基于RSSI比值修正的無線傳感器網(wǎng)絡(luò)DV-Hop定位算法*
2013-10-22 07:25:52楊祥,潘瑋
傳感器與微系統(tǒng) 2013年7期
楊 祥,潘 瑋
(1.武漢理工大學(xué) 信息工程學(xué)院,湖北 武漢 430070;2.桂林理工大學(xué)信息科學(xué)與工程學(xué)院,廣西桂林 541004;3.桂林理工大學(xué)博文管理學(xué)院,廣西桂林 541006;4.桂林理工大學(xué)機械與控制工程學(xué)院,廣西桂林 541004)
0 引言
無線傳感器網(wǎng)絡(luò)通過向目標區(qū)域隨機拋灑大量的微小網(wǎng)絡(luò)節(jié)點,借助于節(jié)點內(nèi)置的形式多樣的傳感器感知所在周邊環(huán)境中各種各樣的物理信號。它的應(yīng)用范圍極廣[1,2],只要涉及到有監(jiān)控存在的地方,無線傳感器網(wǎng)絡(luò)技術(shù)都可展現(xiàn)它的優(yōu)勢,是繼因特網(wǎng)之后,又一次對人類生產(chǎn)生活方式產(chǎn)生重大影響的技術(shù)之一。
一般情況下,沒有位置信息的監(jiān)測數(shù)據(jù)往往是沒有任何意義的。例如:軍事中,在目標區(qū)域內(nèi)監(jiān)測到敵軍浸入,但是沒有位置信息無法判斷具體的入侵地點,從而不能采取相應(yīng)的應(yīng)對措施,實現(xiàn)精確的定位對無線傳感器網(wǎng)絡(luò)的協(xié)議特別是基于地理信息路由的設(shè)計、數(shù)據(jù)融合、目標跟蹤等方面都具有非常重要的意義。目前為止,研究人員已提出許多無線傳感器網(wǎng)絡(luò)節(jié)點定位算法,無需測距定位算法由于其硬件要求、網(wǎng)絡(luò)部署成本、能耗等方面的優(yōu)勢,相對來說更適合于無線傳感器網(wǎng)絡(luò)。其中,DV-Hop定位算法簡單、覆蓋度高和可行性好等特點,使得成為了一種經(jīng)濟適用型定位方法。它的主要缺點是定位精度不是很高,因此,對算法作出改進成為了一個研究熱點[3]。
DV-Hop定位算法的第二階段在計算未知節(jié)點平均每跳距離時,所利用的是距離自己最近的信標節(jié)點的平均每跳距離來計算。但是信標節(jié)點的平均每跳距離是通過到除本節(jié)點外所有其他信標節(jié)點的路徑與最小跳數(shù)之比,所以得到的是全網(wǎng)絡(luò)范圍內(nèi)的平均每跳距離,與該信標節(jié)點附近的網(wǎng)絡(luò)分布密度有一定的差別。同時,僅僅利用跳數(shù)來估測距離,定位限制條件不夠充分,不能區(qū)分具有相同跳數(shù)的節(jié)點距離,從而造成較大的定位誤差。針對此問題,許多學(xué)者提出了改進算法,如 Wu Huarui[4],王新生等人[5]提出把未知節(jié)點附近全部信標節(jié)點的平均每跳距離信息取平均來作為未知節(jié)點的平均每跳距離,但是不能解決相鄰節(jié)點之間距離分布不均引起的每跳估算誤差;周小波等人[6]提出WDV-Hop定位算法,該算法利用第一跳的RSSI作為基準值來修正之后的跳數(shù),算法也無需進行RSSI測距,計算量適中,算法適應(yīng)性較好,改進的精度適中。羅維等人[7]提出一種SDV-Hop改進算法,該算法選擇距離較近的信標節(jié)點進行定位,同時利用信標節(jié)點來校正未知節(jié)點的估計坐標,但是,該改進算法會減小定位覆蓋率,同時也是在增加一定的計算開銷作為代價。
針對各種改進算法,本文提出一種距離修正算法,在算法中引入RSSI測距技術(shù)來輔助定位,但是,它又不需要基于RSSI進行距離計算,只是利用了RSSI作為距離的比征,對每一跳的距離進行修正,從而提高定位精度,幾乎不需要增加計算和通信開銷。
1 DV-Hop定位算法
DV-Hop算法[8,9]的基本思想是網(wǎng)絡(luò)中各個節(jié)點通過典型的距離矢量交換協(xié)議,獲得到各信標節(jié)點的最小跳數(shù)。各個信標節(jié)點獲得其他信標節(jié)點位置和到它們之間的跳段距離后計算網(wǎng)絡(luò)平均每跳距離,然后未知節(jié)點到信標節(jié)點的最小跳數(shù)乘以平均每跳距離得到位置節(jié)點到信標節(jié)點的距離估測。最后,當未知節(jié)點獲得距3個或者3個以上信標節(jié)點的距離之后,利用三邊測量法進行自身定位。DVHop定位算法主要分為以下3個階段:
1)距離矢量交換階段
每個信標節(jié)點向網(wǎng)絡(luò)廣播一個數(shù)據(jù)包{(xi,yi),Hopnum},(xi,yi)表示信標節(jié)點的坐標位置,Hopnum為位置節(jié)點到信標節(jié)點的跳數(shù),初始化為0。每個接收到該數(shù)據(jù)包的鄰居節(jié)點保存該數(shù)據(jù)包,同時將數(shù)據(jù)包中跳數(shù)加1,同時比較來自相同信標節(jié)點的不同跳數(shù)信息,丟棄跳數(shù)大的數(shù)據(jù)包,保存跳數(shù)小的,保證未知節(jié)點到信標節(jié)點的跳數(shù)最小。接著再向自己的鄰居節(jié)點廣播,直到網(wǎng)絡(luò)中所有節(jié)點都獲得與之相鄰信標節(jié)點的位置信息和相應(yīng)的跳數(shù)值。
2)平均跳距估算和廣播階段
每個信標節(jié)點收集到其他信標節(jié)點的位置和跳數(shù)信息后,進行該信標節(jié)點的網(wǎng)絡(luò)平均跳距Hopsizei估算,信標節(jié)點i的平均每跳估算公式如式(1)所示

其中,(xi,yi)為第j個信標節(jié)點位置坐標,Hopnumj為第j個信標節(jié)點到第i個信標節(jié)點的跳數(shù)。信標節(jié)點將計算得到的Hopsizei在網(wǎng)絡(luò)中進行廣播,每個未知節(jié)點僅接收獲得的第一個校正值,丟棄所有后來接收到的值。未知節(jié)點再根據(jù)跳數(shù)信息依照式(2)來計算得到信標節(jié)點的距離d

3)位置估計階段
當未知節(jié)點獲得與3個或3個以上信標節(jié)點距離之后,就可執(zhí)行三邊測量或最大似然估計法定位。
2 基于RSSI比值修正距離估計定位算法
本文提出的基于RSSI比值修正的距離估算算法,從RSSI的測距耗散模型出發(fā),根據(jù)RSSI理論路徑耗散函數(shù)[6,10]

其中,PL(d)為經(jīng)過距離d后的路徑損耗,dBm;d0為從發(fā)射端附近測量的一個參考距離;n為路徑損耗指數(shù)。從式(3)可以得出路徑耗散值與距離呈反比的關(guān)系。考慮到節(jié)點的接收信號強度可以從無線節(jié)點芯片的寄存器直接讀取,所以,可以充分利用這一點來修正DV-Hop計算所得的節(jié)點之間每一跳的距離,該方法無需經(jīng)過復(fù)雜的RSSI距離轉(zhuǎn)換,直接利用的是每一節(jié)點讀取的RSSI值來構(gòu)造修正系數(shù)εi

其中,RSSIi為節(jié)點i的接收信號強度值,RSSIavg為該節(jié)點在平均跳距廣播階段最先接收到的信標節(jié)點的平均信號強度值,具體如式(5)
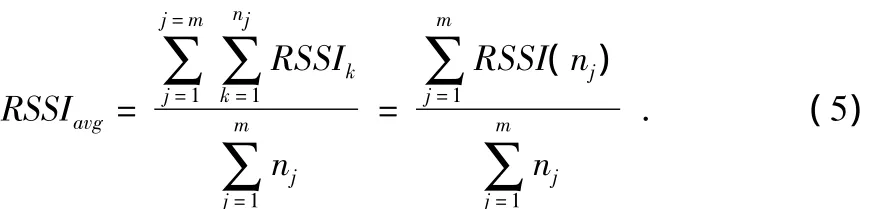
其中,j為該信標節(jié)點可以到達周圍的信標節(jié)點個數(shù),nj為該信標節(jié)點到達周圍第j個信標節(jié)點的最小跳數(shù)。
算法具體詳細過程如下:
1)每個信標節(jié)點產(chǎn)生一個數(shù)據(jù)包{ID,(x,y),Hopnum,RSSIi,RSSI(i)},ID為信標節(jié)點的編號,每個傳感器節(jié)點都有唯一ID號;(x,y)為該ID號的信標節(jié)點位置坐標;Hopnum為跳數(shù),初值為0;RSSIi為第i跳節(jié)點接收該數(shù)據(jù)包的信號強度,初值為0;RSSI(i)為第i跳為止全部節(jié)點的接收信號強度的累積,信標節(jié)點以固定功率向周圍廣播數(shù)據(jù)包。
2)直接鄰居節(jié)點接收到數(shù)據(jù)包后將跳數(shù)Hopnum加1,將RSSIi置為其接收數(shù)據(jù)包時的接收信號強度,RSSI(i)置為第i跳為止節(jié)點的接收信號強度之和,其中,i=Hopnum。最后,得到該節(jié)點的數(shù)據(jù)包信息為{ID,(x,y),1,RSSIi,RSSI(1)},其中,RSSI(1)=RSSI1+RSSI0=RSSI1。
3)接收到信標節(jié)點發(fā)送數(shù)據(jù)包的鄰居節(jié)點以固定功率繼續(xù)向其鄰居節(jié)點發(fā)送數(shù)據(jù)包,接收到數(shù)據(jù)包的鄰居節(jié)點將所得的數(shù)據(jù)包信息變?yōu)閧ID,(x,y),2,RSSI2,RSSI(2)},其中,RSSI(2)=RSSI2+RSSI1+RSSI0,當同一個節(jié)點先后接收到來自同一個ID號的數(shù)據(jù)包,則判斷該數(shù)據(jù)包中的跳數(shù)與自己已存的同一個ID號的數(shù)據(jù)包中的跳數(shù)值,如果大于或等于已存跳數(shù),則丟棄新接收的數(shù)據(jù)包;否則,替換。
4)重復(fù)步驟(3),直到經(jīng)過n跳到達另一信標節(jié)點,該數(shù)據(jù)包最后得到的信息為{ID,(x,y),n,RSSIn,RSSI(n)},其中,RSSI(n)=RSSIn+RSSIn-1+… +RSSI0。最后按照DV-Hop原算法計算信標節(jié)點的平均每跳距離Hopsize,同時根據(jù)式(5)計算平均接收信號強度值RSSIavg。然后,同DVHop方式一樣廣播Hopsize和RSSIavg。
5)計算距離d:首先建立每跳修正系數(shù),用每一跳的RSSIi與RSSIavg相除,作為該跳跳距的修正系數(shù)εi,如式(5)所示。根據(jù)每跳修正系數(shù),計算距信標節(jié)點為m跳的未知節(jié)點與信標節(jié)點距離
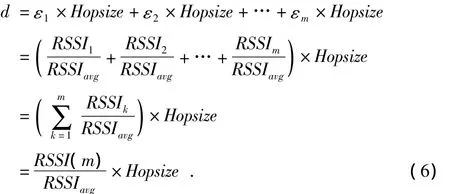
由以上各步驟,各未知節(jié)點可根據(jù)自身存儲信息表中的累計信號強度RSSI(m)、平均信號強度RSSIavg和平均跳距Hopsize方便地計算出到各個信標節(jié)點的距離。
6)當未知節(jié)點獲得與3個或3個以上信標節(jié)點距離之后,就可執(zhí)行三邊測量或最大似然估計法定位。
3 仿真實驗
由于基于RSSI比值修正距離估算算法涉及到每個節(jié)點的接收信號強度RSSI,而RSSI是通過讀取傳感器節(jié)點中特定的寄存器得到的,而通過仿真軟件無法得到RSSI。考慮到引入RSSI比值理論上主要是利用RSSI來比征距離,所以,使用任意兩節(jié)點間的歐氏距離ED來代替節(jié)點的RSSI。仿真參數(shù)設(shè)置為在網(wǎng)絡(luò)范圍100 m×100 m區(qū)域內(nèi)隨機產(chǎn)生100個網(wǎng)絡(luò)節(jié)點。下面分別討論原DV-Hop定位算法,文獻[6]提出的WDV-Hop定位算法和本文改進算法3種定位算法的網(wǎng)絡(luò)節(jié)點平均相對當定位誤差隨信標節(jié)點比例和通信半徑的影響,其中,相對定位誤差σ定義為

其中,(xr,yr)為節(jié)點真實坐標位置,(xe,ye)為估計坐標位置,R為節(jié)點通信半徑。每種算法性能的仿真都是隨機進行100次而得到的結(jié)果,如圖1,圖2所示。由于文獻[6]的WDV-Hop定位算法在通信半徑小于40 m的時候,定位改進效果較差,甚至與原DV-Hop差不多,所以,取R大于40 m進行仿真,仿真結(jié)果表明:本文改進的算法定位誤差始終小于原DV-Hop和WDV-Hop定位算法,且隨著信標節(jié)點比例的影響不是很大,定位誤差相對較穩(wěn)定,對比圖1和圖2可以發(fā)現(xiàn),本文改進算法隨著通信半徑的增加,定位誤差也隨之下降。
圖1 通信半徑R=40m相對定位誤差比對圖Fig 1 Relative localization error comparison chart with R=40 m
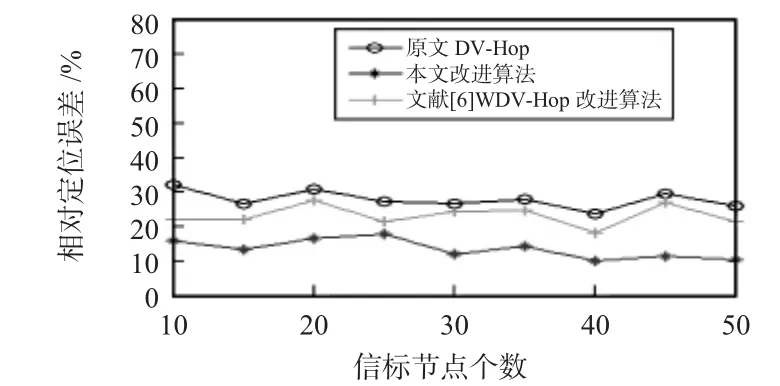
圖2 通信半徑R=50 m相對定位誤差比對圖Fig 2 Relative position error comparison chart with R=50 m
4 結(jié)論
本文的基于RSSI比值修正的DV-Hop定位算法,與文獻[6]所提的改進算法類似,都是直接利用RSSI進行修正,增加的是有限的加法和除法,也無需信標節(jié)點進行重新廣播,增加的計算和通信開銷幾乎可以忽略不計,同時修正系數(shù)都是一個比值,所以,對環(huán)境適應(yīng)性較大[6],但比起WDV-Hop定位算法,本文的定位誤差明顯占優(yōu)勢。相比文獻[4,5,7]及其他的一些基于DV-Hop改進算法,本文的改進算法在計算開銷、算法適應(yīng)性、定位覆蓋率等方面都有相對的優(yōu)勢,同時,該改進算法也存在一些不足,如受節(jié)點接收的RSSI影響較大,需要在取得的RSSI值真實的反映節(jié)點間歐氏距離情況下才能保證算法的精度。
[1] Alemdar H,Ersoy C.Wireless sensor networks for healthcare:A survey[J].Computer Networks,2010,54:2688 -2700.
[2] Othmana M F,Shazali K.Wireless sensor network applications:A study in environment monitoring system[J].Procedia Engineering,2012,41:1204 -1210.
[3] 劉曉春.無線傳感器網(wǎng)絡(luò)DV-Hop定位算法的改進與仿真[D].重慶:重慶交通大學(xué),2011:13-15.
[4] Wu Huarui,Gao Ronghua.An improved method of DV-Hop localization algorithm[J].Journal of Computational Information Systems,2011,7(7):2293 -2298.
[5] 王新生,趙衍靜,李海濤.基于DV-Hop定位算法的改進研究[J].計算機科學(xué),2009,38(2):76 -90.
[6] 周小波,喬鋼柱,曾建潮.無線傳感器網(wǎng)絡(luò)中基于RSSI的加權(quán)DV-Hop定位方法[J].計算機工程與設(shè)計,2011,47(14):109-111.
[7] 羅 維,姜秀柱,盛蒙蒙.無線傳感器網(wǎng)絡(luò)選擇性DV-Hop定位算法[J].傳感器與微系統(tǒng),2012,31(3):71 -77.
[8] Niculescu D,Nath B.DV-based positioning in Ad Hoc networks[J].Telecommunication Systems,2003,22(1):268 -275.
[9] 于宏毅,李 鷗,張效義,等.無線傳感器網(wǎng)絡(luò)理論、技術(shù)與實現(xiàn)[M].北京:國防工業(yè)出版社,2010:260-266.
[10] Shen Xingfa,Wang Zhi,Jiang Peng.Connectivity and RSSI-based localization scheme for wireless sensor networks[C]∥International Conference on Intelligent Computing,2005:578 -587.
