船舶動力設備及推力軸承集成隔振系統設計
2013-10-20 06:58:58何江洋帥長庚
艦船科學技術 2013年1期
何江洋,何 琳,帥長庚,徐 偉
(1.海軍工程大學振動與噪聲研究所,湖北武漢430033;2.船舶振動噪聲重點實驗室,湖北武漢430033)
0 引言
現代船舶減振降噪面臨的主要問題之一是機械噪聲過高,大型動力設備噪聲以及螺旋槳脈動力引起的推進軸系縱向振動經推力軸承傳遞到船體,可激發船體強烈的振動[1]。因此,必須采取有效的技術手段進行控制。近年來,國內開發出大載荷氣囊隔振器和智能氣囊隔振裝置技術,有效解決了船舶大型動力設備和推進主機的機械噪聲控制問題[2]。當動力設備噪聲得到有效控制后,推力軸承的振動已成為船舶降噪的另一主要噪聲源。
對于推力軸承隔振,由于受軸系縱向靜態允許變形量限制,隔振器剛度不能過低,因而固有頻率也較高,對軸系低頻振動隔離效果有限[3]。此外,螺旋槳推力作用在隔振系統上,隔振裝置、推力軸承以及推進軸系會產生較大的位移,使軸系受力狀態惡化,對軸系運行安全性造成影響[4]。目前國外已研制出具有位移補償功能和低噪聲的推力軸承,有效隔離了推進軸系振動,推力軸承隔振后,隔振系統與軸系相對位移得到了較好的補償[5]。
1 集成隔振系統設計構想
本文提出將船舶主要動力設備與推力軸承安放在同一公共基座上,基座用固有頻率低、橫向大剛度隔振器與船體連接,分別在垂向、橫向、縱向均布隔振器,垂向隔振器用來支撐主要動力設備及推力軸承重量,縱向隔振器與橫向隔振器保證隔振裝置與推進軸系運行穩定,并承擔部分螺旋槳推力 (見圖1)。集成隔振系統可將推力軸承對船體的集中力轉化為各個隔振器對船體的分散作用力,不僅可有效地隔離動力設備和推力軸承振動,并使推力軸承受螺旋槳推力產生的變形很小,從而維持推力軸承和軸系的正常工作。
開展集成隔振系統設計研究要解決的關鍵問題是螺旋槳推力與隔振系統剛度特性匹配設計,主要包括:系統可有效隔離由螺旋槳脈動力引起的軸系振動;船舶各種運行工況下,系統位移滿足軸系運行安全性要求。
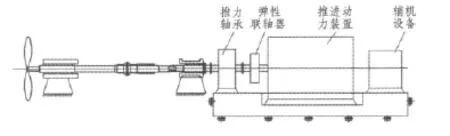
圖1 集成隔振系統示意圖Fig.1 The scheme of integrated vibration isolator
2 集成隔振系統力學模型
建立坐標系,如圖2所示,忽略船舶基座的運動和隔振器角剛度的影響[6],得到系統六自由度模型:

其中:xp=[xp,yp,zp,α,β,γ]T為系統重心在 x,y,z坐標方向的位移和系統繞x,y,z坐標軸的轉動角度;F=[Fx,Fy,Fz,Mx,My,Mz]T為系統所受外界力分解后合成的列向量;M為系統質量矩陣;K為系統總剛度矩陣,由隔振器的剛度經坐標變換后集合而成。
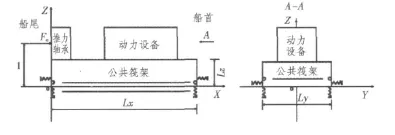
圖2 集成隔振系統力學模型平面示意圖Fig.2 The plane schemes of mechanical model of integrated vibration isolation system
剛度矩陣K的表達式為

式中:Gi為隔振器的位置變換矩陣,即將隔振器在安裝位置處的剛度坐標矩陣變換為在重心處的剛度矩陣,Kki,Kci,Kfi分別為基座垂向、橫向、縱向隔振器在安裝位置處的剛度矩陣。
船舶非傾斜搖擺工況下,隔振系統所受外力F=[Fa0 0 0 Fal 0]T,Fa為螺旋槳推力,l為螺旋槳推力作用位置在坐標系中的垂向坐標。此時隔振系統只在xoz平面內產生位移特性,為簡化分析,6自由度模型變為3自由度模型,且式(1)中二階導數量為0,隔振系統模型為
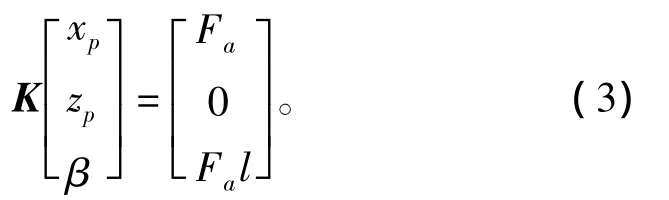
式中:
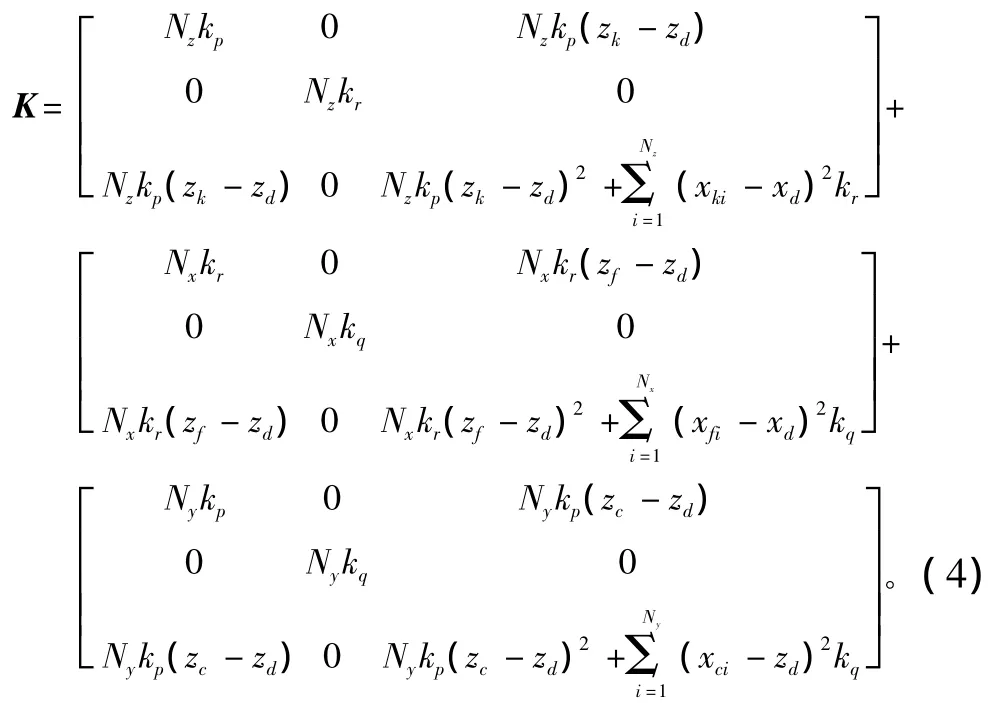
其中:Nz,Nx,Ny分別為垂向、縱向、橫向隔振器個數;kp,kq,kr分別為隔振器三向剛度;zj,xj(j=k,f,c,d)分別表示垂向、縱向、橫向隔振器的安裝位置坐標,以及隔振系統重心的位置坐標。
船舶傾斜搖擺時,隔振裝置的變形近似于靜態過程,動力裝置重力與隔振器支撐力之間的平衡被破壞,相當于在船舶不傾斜時對隔振系統施加了外力和力矩[7]。
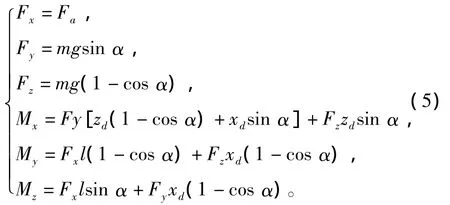
船舶橫傾狀態下,隔振系統受力為:
船舶縱傾狀態下,隔振系統受力為:
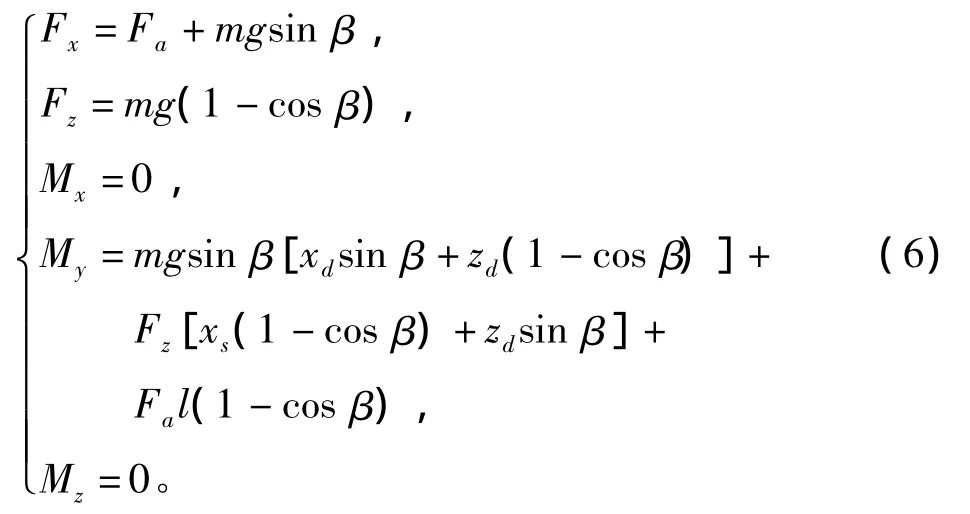
式中:α和β分別為艦船橫傾、縱傾的角度;xd和zd分別為隔振系統重心位置坐標。
集成隔振系統所關心的主要是推力軸承處的位移,因為推力軸承的位移將影響推力盤與推力塊之間的油膜厚度,增加額外的軸承載荷,并對軸系運行安全性造成影響。
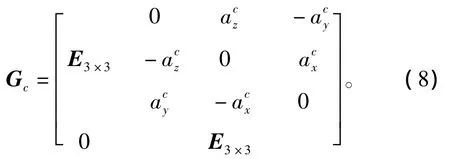
推力軸承處位移表達式為

其中:xp為系統位移列向量;Gc為推力軸承處的位置變換矩陣,其表達式為

3 算例分析
3.1 船舶非傾斜搖擺工況下系統位移特性
將表1數據代入式(3),得到系統位移特性:
計算結果表明,集成隔振系統在螺旋槳靜態推力作用下軸向位移<0.8 mm,轉動位移<0.1 mm/m,系統軸向位移滿足船標關于尾軸密封裝置允許的軸向位移。
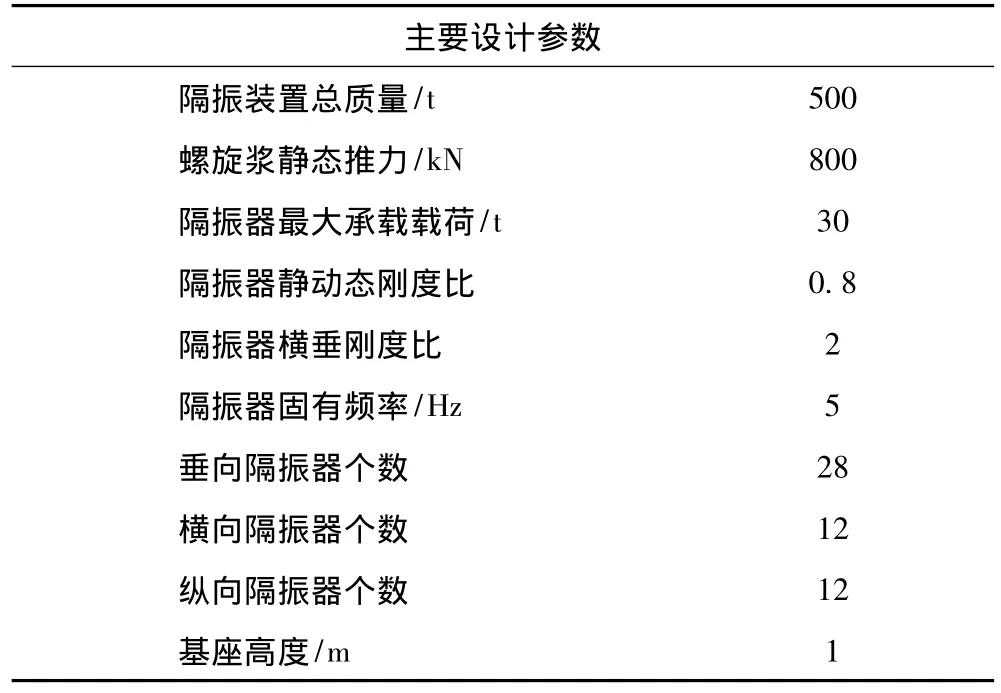
表1 隔振系統設計方案參數Tab.1 The design parameters of vibration isolation system
用式(7)求解得到推力軸承處位移:
對比式(9)和式(10)發現,推力軸承處位移變化較小,軸向、垂向位移有所增加,增加幅值較小。
3.2 船舶傾斜搖擺工況下推力軸承位移特性
由式(4)可知,影響隔振系統剛度矩陣的主要參數是隔振器的三向剛度及隔振器布置位置;由式(5)和式(6)可知,影響外力列向量的主要可變參數是螺旋槳推力作用位置,由于隔振器數量眾多,隔振器布置位置可改變量較少,故主要從隔振器固有頻率、橫垂剛度比以及螺旋槳推力作用位置3個方面分析對隔振系統位移的影響,其中螺旋槳推力作用位置的變化體現在公共基座高度的變化。
圖3~圖5分別為不同隔振器固有頻率、橫垂剛度比及公共基座高度下,推力軸承中心在船舶傾斜搖擺時的三向位移。由式(6)可看出,Mx和Fy均為0,船舶縱傾時橫向不受力與力矩,橫向位移始終是0,故圖中縱傾工況下只畫出軸向、垂向位移。
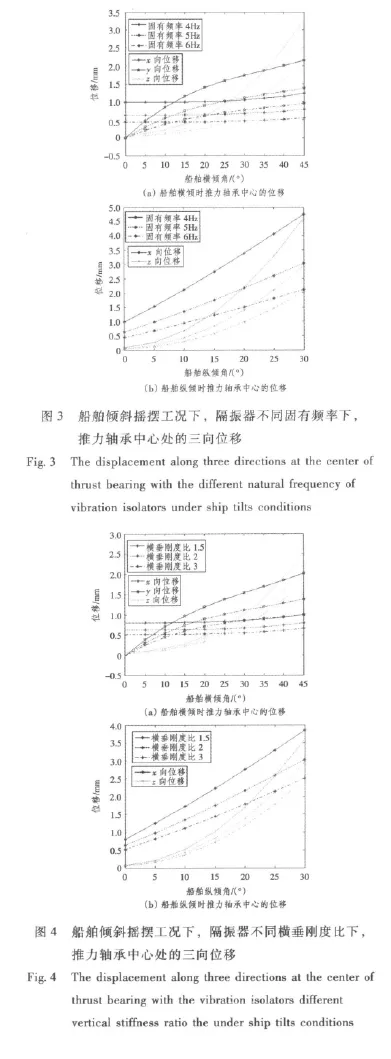
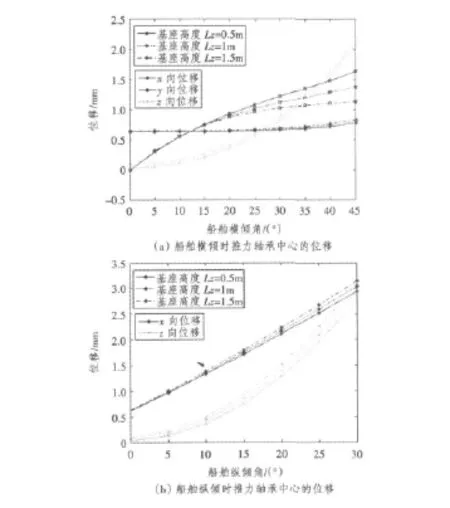
圖5 船舶傾斜搖擺工況下,公共基座不同高度下,推力軸承中心處的三向位移Fig.5 The displacement along three directions at the center of thrust bearing with the different height of the public base under ship tilts conditions
從圖3~圖5可以看出,增大隔振器固有頻率和隔振器橫垂剛度比能有效減小推力軸承處的三向位移;相反,增大公共基座高度即螺旋槳推力作用位置,導致作用在隔振裝置的外力距變大,從而增大推力軸承處軸向、垂向位移。船舶實際工況下由于限位器的作用,船舶搖擺最大角度為15°,對比圖3和圖4可發現,當固有頻率大于5 Hz或橫垂剛度比大于2時,推力軸承處各向位移縱傾小于2 mm,橫傾小于1 mm。此外,圖5橫傾工況下增大公共基座高度,系統橫向位移有所減小。
4 系統固有頻率特性
由上節分析可知,增大系統剛度特性能顯著減小船舶不同工況下推力軸承處的位移,同時也會增大系統的固有頻率,對隔振效果造成影響,因此有必要分析主要設計參數對系統固有頻率的影響。

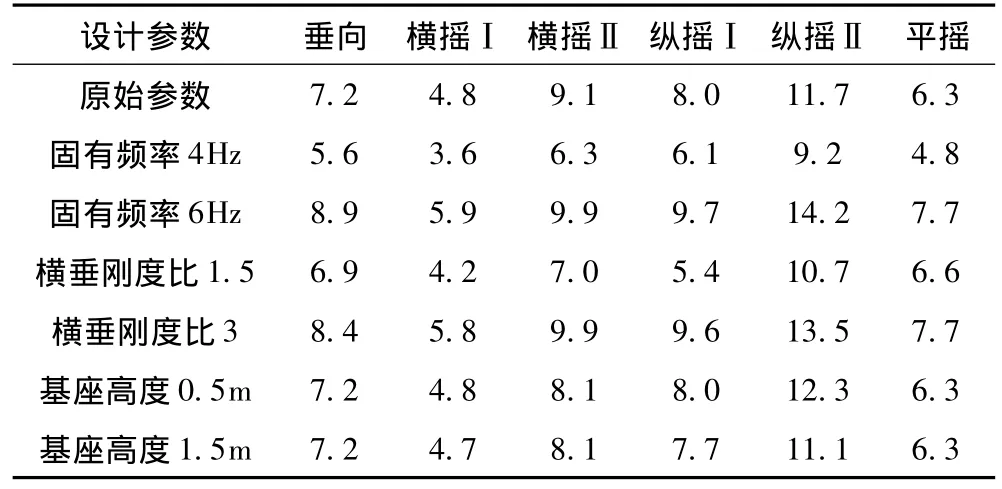
表2 主要設計參數對系統固有頻率的影響Tab.2 The influence of main designing parameters on natural frequency of the system
表2中第2行為設計方案原始參數即表1中相關參數,3,4,5,6,7,8行是在原始設計參數的基礎上單獨改變1個參數所得系統固有頻率。
分別對比表2中第2,3,4行,第2,5,6行,單獨改變1個設計參數對系統6自由度剛體模態頻率影響較小,其中隔振器固有頻率6 Hz時縱搖Ⅱ階模態固有頻率最大為14.2 Hz,滿足隔振頻率范圍要求;對比第2,7,8行可知,基座高度的變化對系統固有頻率沒有明顯影響。因此減小推力軸承位移的措施不會影響推進軸系隔振效果。
5 結語
本文針對船舶尾部機械噪聲過高,基于大載荷氣囊隔振技術的研究成果,提出將船舶動力設備與推力軸承集成隔振的設計構想,建立了集成隔振系統的理論模型,重點分析了船舶靜態與準靜態工況下系統的位移特性,以及系統主要設計參數對推力軸承位移特性與系統固有頻率的影響,驗證了設計構想的可行性,分析結果表明:
1)船舶非傾斜搖擺工況下,螺旋槳靜態推力作用在隔振系統上,系統軸向位移小于0.8 mm,轉動位移小于0.1 mm/m;
2)船舶傾斜搖擺工況下,增大隔振器固有頻率和橫垂剛度比,可以有效減小系統位移特性,船舶搖擺角度為15°時,限位器將限制搖擺角度繼續增大,此時隔振器固有頻率大于5 Hz或隔振器橫垂剛度比大于2時,推力軸承處三向位移橫傾小于1 mm,縱傾小于2 mm。
3)采用合理的設計方案,集成隔振系統可顯著減小推力軸承位移,同時有效隔離由螺旋槳脈動力引起的推進軸系振動。
4)船舶不同工況下集成隔振系統位移較小,對具有位移補償功能的軸承提供了設計參考意義,以便進一步工程實際應用。
[1]施引,朱石堅,何琳.船舶動力機械噪聲及其控制[M].北京:國防工業出版社,1990.106-120.SHI Yin,ZHU Shi-jian,HE Lin.The noise and control of marine power mechanism[M].Beijing:National Defense Industry Press,1990.106-120.
[2]徐偉,何琳,等.船舶主機氣囊隔振系統動態特性分析[J].振動與沖擊,2007,26(7):122-124.XU Wei,HE Lin.Dynamic analysis of an air spring mounting system for marine main engine[J].Journal of vibration and shock,2007,26(7):122-124.
[3]JIE Pan,FARAG N,LIN T.Propeller Induced Structural Vibration Through the Thrust Bearing[C].Proceedings of Acoustics 2002,Adelaide,Australia,2002.
[4]曹貽鵬.推進軸系引起的艇體結構振動與輻射噪聲控制研究[D].哈爾濱:哈爾濱工程大學,2008.CAO Yi-peng.Study on underwater structure vibration and radiated noise control caused by propeller exciting force[D].Harbin:Harbin Engineering University,2008.
[5]ANDERSON H G,et al.Trunnion mounted marine thrust bearing/vibration reducer[P].US patent:3826544,1974-07-30.
[6]LI W L,LAVRICH P.Prediction of power flows through machine vibration isolators[J].Journal of Sound and Vibration,1999,224(4):757-774.
[7]徐偉,李桐橋.推進電機新型隔振裝置設計研究[J].艦船科學技術,2006,28(2):86-88.XU Wei,LI Tong-qiao.Design study of a new mounting system for marine propulsion electrical machine[J].Ship Science and Technology,2006,28(2):86-88.
[8]趙耀,張贛波,李良偉.船舶推進軸系縱向振動及其控制技術研究進展[J].中國造船,2011,52(4):260-269.ZHAO Yao,ZHANG Gan-bo,LI Liang-wei.Review of advances on longitudinalvibration ofship propulsion shafting and its control technology[J].Shipbuilding of China,2011,52(4):260-269.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45