基于光電成像的目標(biāo)轉(zhuǎn)動(dòng)姿態(tài)非接觸測量方法
2013-10-20 06:59:06袁紅衛(wèi)閔志方
艦船科學(xué)技術(shù) 2013年1期
關(guān)鍵詞:測量
袁紅衛(wèi),閔志方
(華中光電技術(shù)研究所,武漢光電國家實(shí)驗(yàn)室,湖北武漢430073)
0 引言
隨著光電測量成像傳感器性能的提升 (包括傳感器的成像分辨率、成像質(zhì)量和成像幀頻等)以及數(shù)字圖像軟件處理算法和硬件處理性能的增強(qiáng),光電測量已經(jīng)廣泛應(yīng)用于國防和民用各領(lǐng)域,特別是通過光電成像方式來對(duì)目標(biāo)自身的姿態(tài)進(jìn)行非接觸式測量[1-2]。如在航天航空領(lǐng)域中,可通過多基站光電經(jīng)緯儀對(duì)空中目標(biāo)的三維運(yùn)動(dòng)姿態(tài)進(jìn)行非接觸式測量;在電力行業(yè),可通過可見光/紅外傳感器對(duì)高壓輸電線路的異常狀態(tài) (如覆冰)進(jìn)行非接觸式測量;在鐵路行業(yè),可通過脈沖激光測距儀在可見光電視跟蹤的狀態(tài)下對(duì)受電弓供電線路的架設(shè)位置進(jìn)行非接觸式測量等[3-4]。光電成像測量之所以越來越受到各行各業(yè)的青睞,是因?yàn)樗鼈兌季哂蟹墙佑|式測量的安全性和便捷性,以及測量精度高、可靠性好等優(yōu)點(diǎn)[5-6]。
本文主要介紹了一種利用光電成像對(duì)非平移目標(biāo)的二維轉(zhuǎn)動(dòng)姿態(tài)的非接觸式測量方法。該測量過程利用高速可見光相機(jī)和高速圖像處理方法,能夠?qū)崟r(shí)輸出高幀頻姿態(tài)測量數(shù)據(jù)。
1 待測物體描述
以某項(xiàng)目為例,被測物體為圓錐形剛體,待測物體能夠在x,y兩個(gè)軸上進(jìn)行轉(zhuǎn)動(dòng),如圖1所示。
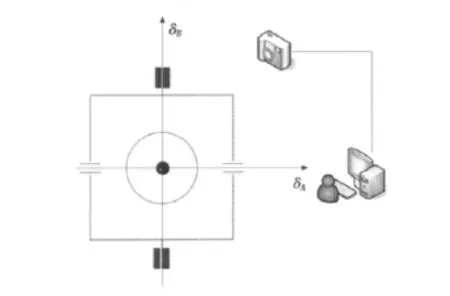
圖1 轉(zhuǎn)動(dòng)非接觸式測量系統(tǒng)示意圖Fig.1 Diagram of the non-contact measurement system for target rotation
但由于2個(gè)轉(zhuǎn)軸被固定住,不能進(jìn)行任何方向上的平移運(yùn)動(dòng),需要對(duì)轉(zhuǎn)角δA和δB進(jìn)行非接觸式測量。轉(zhuǎn)角δA和δB的測量范圍均為0~±22°;轉(zhuǎn)角測量誤差和系統(tǒng)零位轉(zhuǎn)角誤差均需低于0.05°;系統(tǒng)采樣頻率高于500 Hz,且測量信號(hào)時(shí)間延遲<2 ms。
另外,要求非接觸式測量設(shè)備能對(duì)被測物體轉(zhuǎn)動(dòng)進(jìn)行實(shí)時(shí)測量和解算;能對(duì)轉(zhuǎn)動(dòng)數(shù)據(jù)實(shí)時(shí)顯示、輸出和記錄;能對(duì)整個(gè)測量過程的高速視頻進(jìn)行記錄,并對(duì)記錄視頻進(jìn)行回放觀察和驗(yàn)證。
2 基于光電成像的非接觸式測量
設(shè)備系統(tǒng)構(gòu)成如圖2所示。該測量裝置采用高速攝像機(jī)作為被測物體轉(zhuǎn)動(dòng)測量的傳感器。當(dāng)高速攝像機(jī)獲取感興趣區(qū)域 (靶標(biāo))的圖像信息后,高速圖像采集單元將圖像采集下來,并通過高速視頻記錄單元記錄在高速硬盤,以便于回放觀察和后期處理。
另一方面,高速相機(jī)通過高速視頻數(shù)據(jù)傳輸接口與高速圖像處理單元連接,該處理單元能夠?qū)D像進(jìn)行實(shí)時(shí)的濾波處理和高速目標(biāo)跟蹤提取功能,通過實(shí)時(shí)圖像數(shù)據(jù)處理同步得到2個(gè)自由度方向上物體沿2個(gè)相機(jī)光軸垂直平面的轉(zhuǎn)動(dòng)數(shù)據(jù),利用該數(shù)據(jù)即可以計(jì)算出物體繞轉(zhuǎn)軸的真實(shí)轉(zhuǎn)動(dòng)數(shù)據(jù)并通過通用PCI總線發(fā)往計(jì)算機(jī)主機(jī)。計(jì)算機(jī)主機(jī)上運(yùn)行的顯示和控制軟件能夠?qū)Ω咚僖曨l進(jìn)行低幀頻顯示,將接收到的轉(zhuǎn)動(dòng)數(shù)據(jù)進(jìn)行實(shí)時(shí)顯示和記錄,并通過光纖網(wǎng)絡(luò)接口向外發(fā)送,該軟件還能夠?qū)Ω咚傧鄼C(jī)的參數(shù)、高速視頻采集單元和高速視頻記錄單元的參數(shù)進(jìn)行控制。
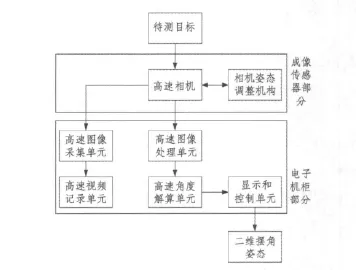
圖2 設(shè)備系統(tǒng)構(gòu)成Fig.2 Block diagram of the equipment systems constitution
該測量裝置主要由成像傳感器和電子機(jī)柜2部分組成。成像傳感器部分包含高速相機(jī)、光學(xué)自準(zhǔn)直設(shè)備以及相應(yīng)的相機(jī)姿態(tài)調(diào)整平臺(tái);電子機(jī)柜部分包括機(jī)柜、計(jì)算機(jī)主機(jī)、顯示屏和高速圖像記錄系統(tǒng)。
成像傳感器部分的高速相機(jī)通過高速數(shù)據(jù)傳輸線與電子機(jī)柜部分的計(jì)算機(jī)主機(jī)內(nèi)的圖像處理板以及高速圖像記錄系統(tǒng)相連;圖像處理板則通過PCI數(shù)據(jù)總線與計(jì)算機(jī)主機(jī)相連。外部仿真機(jī)與電子機(jī)柜部分通過光纖連接。
測量過程:首先將待測物體的轉(zhuǎn)軸安裝水平,即保持2個(gè)轉(zhuǎn)軸確定的平面與水平面保持平行,高速攝像機(jī)也水平安裝于物體正下方,并通過相機(jī)位置的平移調(diào)節(jié),保證相機(jī)的光軸指向轉(zhuǎn)軸交點(diǎn),如圖3所示。
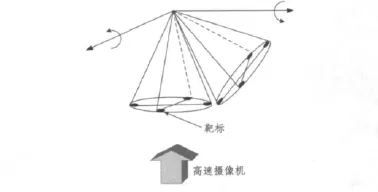
圖3 測量系統(tǒng)原理示意圖Fig.3 Schematic diagram of the measurement system
設(shè)二維擺軸的交點(diǎn)為空間坐標(biāo)系原點(diǎn)(0,0,0),高速攝像機(jī)的成像光心坐標(biāo)點(diǎn)為(r,s,t),成像平面距離光心為 d,旋轉(zhuǎn)前靶標(biāo)的坐標(biāo)為(u0,v0,w0),旋轉(zhuǎn)后的坐標(biāo)為(u1,v1,w1),旋轉(zhuǎn)前靶標(biāo)成像坐標(biāo)為(x0,y0)(相對(duì)于光心位置),旋轉(zhuǎn)后的成像坐標(biāo)為(x1,y1)(相對(duì)于光心位置)。可以得到方程組如下:
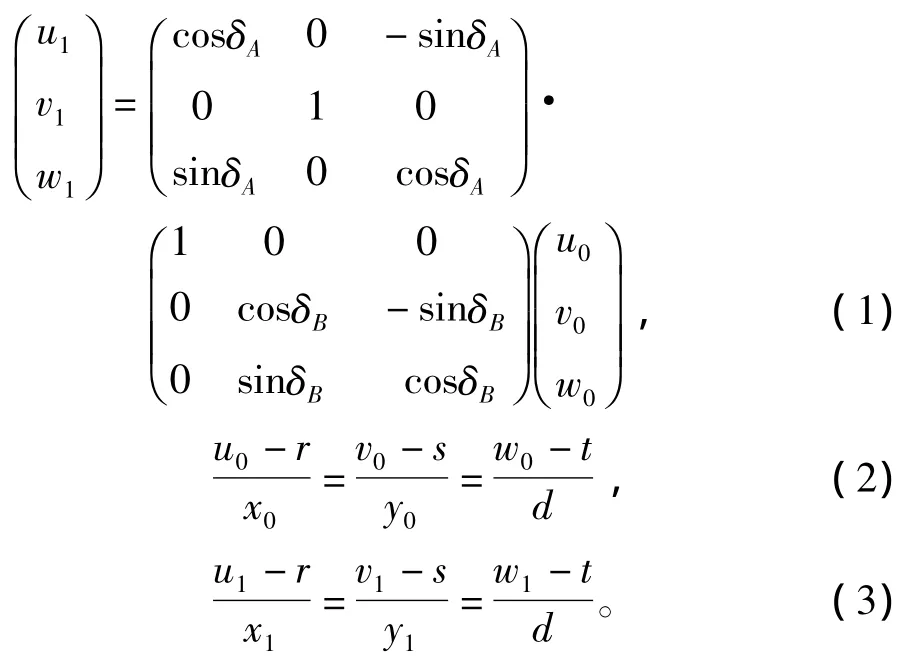
式(1)~式(3)共有2個(gè)旋轉(zhuǎn)角,光心坐標(biāo)、成像平面、光心距離及旋轉(zhuǎn)前后靶標(biāo)坐標(biāo)共有12個(gè)未知數(shù),但卻只有7個(gè)方程,因此是不定方程組,無法唯一解出旋轉(zhuǎn)角。
若靶標(biāo)有k個(gè),上述方程組有k個(gè),那么旋轉(zhuǎn)方程個(gè)數(shù)則有3k個(gè),靶標(biāo)空間比例方程則有4k個(gè);而未知數(shù)有2個(gè)位置旋轉(zhuǎn)角,1組光心坐標(biāo),成像平面與光心距離以及6k個(gè)旋轉(zhuǎn)前后靶標(biāo)坐標(biāo)。為了保證方程個(gè)數(shù)與未知量相同,則有3k+4k=2+3+1+6k;所以至少需要k=6組靶標(biāo)點(diǎn)的成像結(jié)果才能解出方程組。由于方程組并不是線性方程,顯然這樣的計(jì)算量太大,對(duì)于高速計(jì)算來說無法保證實(shí)時(shí)性。
因此,為了能夠只用1組成像靶標(biāo)就解出旋轉(zhuǎn)角,需要通過調(diào)整相機(jī)位置使得r=s=t=0,且事先確定成像平面與光心距離d。此時(shí)則有方程組
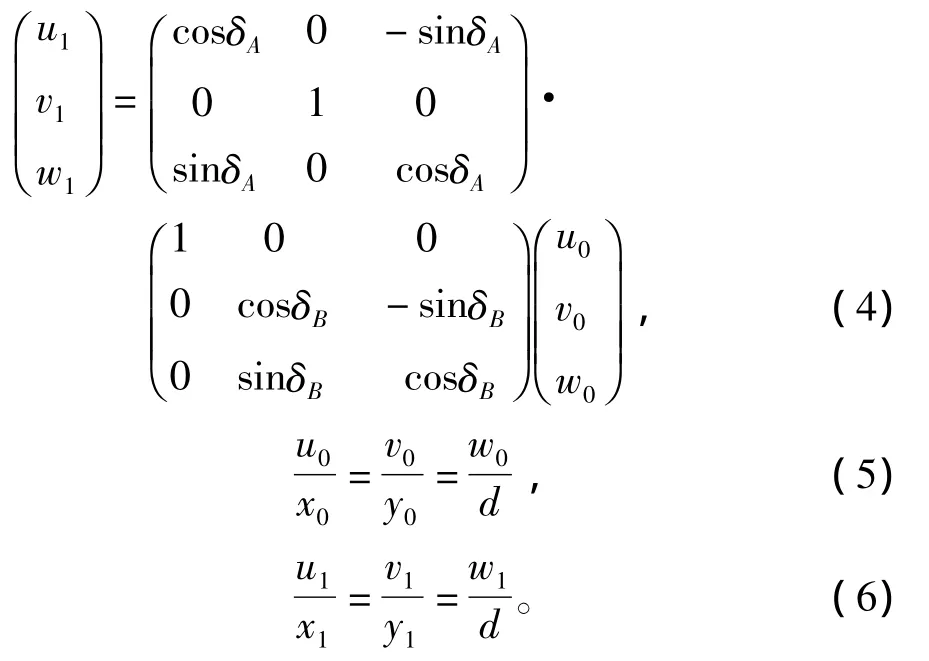
此時(shí)共有2個(gè)旋轉(zhuǎn)角和6個(gè)靶標(biāo)坐標(biāo)參數(shù)共8個(gè)未知量,但是卻只有3+4共7個(gè)方程,仍然無法解出未知數(shù)。由于旋轉(zhuǎn)前后靶標(biāo)到原點(diǎn)的距離是可以事先確定的,因此可以增加方程

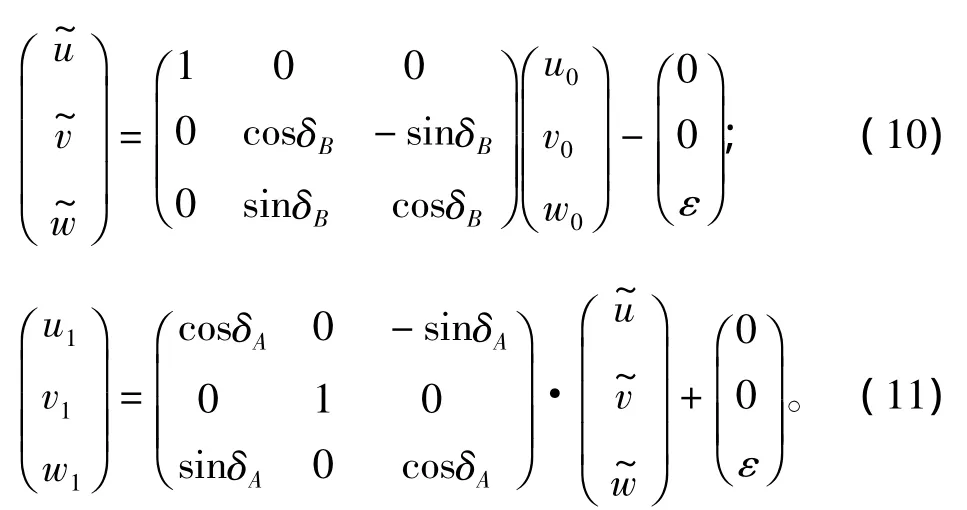
為了得到成像平面與光心距離d,可以通過以下的成像方法計(jì)算得到:
設(shè)成像的物距為p,鏡頭焦距為f,由于成像靶面到成像物體之間的距離可以測出,設(shè)為g,則有
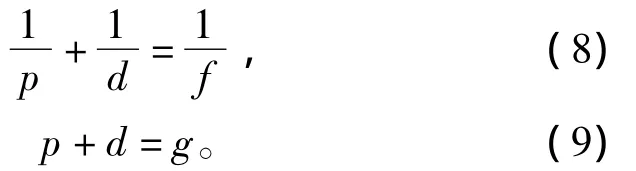
由上述方程組即可解得d。由于2個(gè)轉(zhuǎn)軸在z軸方向上并非重合,即2個(gè)轉(zhuǎn)軸之間存在一定的距離,可以通過前期測量得到,設(shè)為ε,可得到如下方程組
由于任何待測物體都不是絕對(duì)剛性,因此安裝的靶標(biāo)在測量過程中會(huì)因?yàn)檗D(zhuǎn)軸的轉(zhuǎn)動(dòng)形成一定的運(yùn)動(dòng)形變。為了測量零位誤差,需要在錐體底面圓形中心安裝1個(gè)靶標(biāo),由于實(shí)際情況無法做到,因此需要4個(gè)靶標(biāo),依據(jù)靶標(biāo)質(zhì)心連線的交點(diǎn)來確定錐體定點(diǎn)垂線的偏移位置。
若需要解算出任意給定坐標(biāo)系下的轉(zhuǎn)角 (如繞Z軸向旋轉(zhuǎn)θ=45°的坐標(biāo)系下的旋轉(zhuǎn)δφ和δψ),可以先對(duì)原始坐標(biāo)系進(jìn)行旋轉(zhuǎn),繞Z軸逆時(shí)針旋轉(zhuǎn)θ度即得到所需解算的角度δφ和δψ所在的坐標(biāo)系。因此,新坐標(biāo)系下的擺動(dòng)向量坐標(biāo)為:
3 測量方法工作流程
首先將待測物體降至零位,即讓2個(gè)轉(zhuǎn)軸都?xì)w于零位。對(duì)錐體底面貼上高對(duì)比度反光圓形靶標(biāo),為了增大目標(biāo)對(duì)比度,可以在靶標(biāo)周圍設(shè)計(jì)為黑色的背景,必要時(shí)可用照明裝置對(duì)靶標(biāo)進(jìn)行照射。靶標(biāo)的中心連線方向盡可能與轉(zhuǎn)軸的軸線平行,分別在錐體底端左右兩端。
然后將成像傳感器置于待測物體底部約1 m距離。將轉(zhuǎn)軸方向與成像傳感器的視軸調(diào)為平行。在2個(gè)成像傳感器的位置和姿態(tài)調(diào)整完畢后,可開始所需要的姿態(tài)測量。姿態(tài)測量時(shí),首先打開成像傳感器和電子機(jī)柜,待高速處理和記錄設(shè)備正常工作后再控制物體的姿態(tài)變化。高速圖像處理單元將實(shí)時(shí)提取靶標(biāo)位置并由此解算轉(zhuǎn)動(dòng)角度。設(shè)備工作流程如圖4所示。
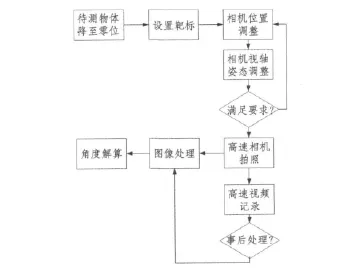
圖4 設(shè)備工作流程圖Fig.4 Devices working flowchart
計(jì)算單元對(duì)圖像數(shù)據(jù)的高速實(shí)時(shí)處理。圖像各幀數(shù)據(jù)依照采集的順序被存放在計(jì)算機(jī)指定的堆內(nèi)存中,可以考慮開辟2塊堆內(nèi)存用于存放圖像數(shù)據(jù),第n幀的圖像數(shù)據(jù)將直接覆蓋第n-2幀的圖像數(shù)據(jù)。計(jì)算機(jī)指令直接計(jì)算靶標(biāo)的質(zhì)心位置,為了能夠減少計(jì)算量,假定已知前一幀的靶標(biāo)質(zhì)心位置,則當(dāng)前幀的質(zhì)心只需要考慮以前一幀為中心的一定范圍區(qū)域內(nèi)的質(zhì)心計(jì)算問題,整個(gè)計(jì)算過程的算法復(fù)雜度是線性的。因此可以保證圖像處理過程的實(shí)時(shí)性。
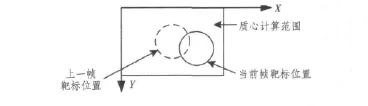
圖5 快速質(zhì)心提取原理Fig.5 Schematic diagram of the fast centroid extraction algorithm
質(zhì)心求取公式如下
X方向:

Y方向:

其中:M為質(zhì)心計(jì)算矩陣的行寬;N為質(zhì)心計(jì)算矩陣的列寬;u(i,j)為相應(yīng)像素的灰度值;x(i,j)和y(i,j)分別為相應(yīng)像素的列號(hào)和行號(hào)。
4 測量系統(tǒng)硬件處理單元
高速圖像處理電路板的主要功能是接收高清視頻接口的高幀頻CMOS輸入的視頻信號(hào),進(jìn)行高速視頻A/D變換。精確地提取目標(biāo)的幾何中心;完成數(shù)據(jù)解算,通過通用PCI接口實(shí)時(shí)輸出角度信息,顯示視頻信號(hào)到監(jiān)視器和 DVI顯示器。Full CameraLink輸出接口直接與高速采集和記錄系統(tǒng)連接。圖像采集與處理視頻數(shù)據(jù)的最高分辨率為1280×1024,由于DSP采用的是TI公司的高端720 MHz定點(diǎn)DSP,保證了由足夠的速度完成每幀目標(biāo)的提取任務(wù)。
系統(tǒng)設(shè)計(jì)上采用模塊化設(shè)計(jì)的思想:FPGA完成圖像采集、外部存儲(chǔ)器的讀寫邏輯控制,DSP讀寫RAM的總線切換和實(shí)時(shí)圖像的去隔行濾波等功能。DSP實(shí)現(xiàn)包括模板匹配、模式識(shí)別等多種圖像算法。由于圖像采集卡的復(fù)雜性和大量數(shù)據(jù)的運(yùn)算及邏輯控制,因此采用高速DSP作為數(shù)字信號(hào)處理的核心。以TI的TMS320C6414作為數(shù)字信號(hào)處理器,F(xiàn)PGA采用ALTERA的EP2S60F672,以國半公司的DS90CR288作為Camera Link接口芯片,通過32位數(shù)據(jù)總線與DSP進(jìn)行視頻數(shù)據(jù)傳輸。
5 測量方法仿真實(shí)驗(yàn)
該項(xiàng)目中采用的高速攝像機(jī)的分辨率為1280×1024;像元大小為14 μm×14 μm,仿真實(shí)驗(yàn)轉(zhuǎn)軸距離光心的距離為1.5 m,靶標(biāo)距離轉(zhuǎn)軸的距離為0.48 m,鏡頭焦距為22 mm;轉(zhuǎn)軸零位時(shí),靶標(biāo)的成像位置距離中心在X和Y方向上均偏移了10個(gè)像素。在這種情況下,給出轉(zhuǎn)軸旋轉(zhuǎn)時(shí)靶標(biāo)不同成像位置所求出的轉(zhuǎn)軸角度值 (見圖6~圖7)。
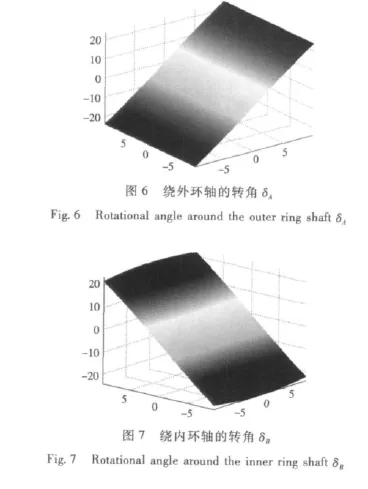
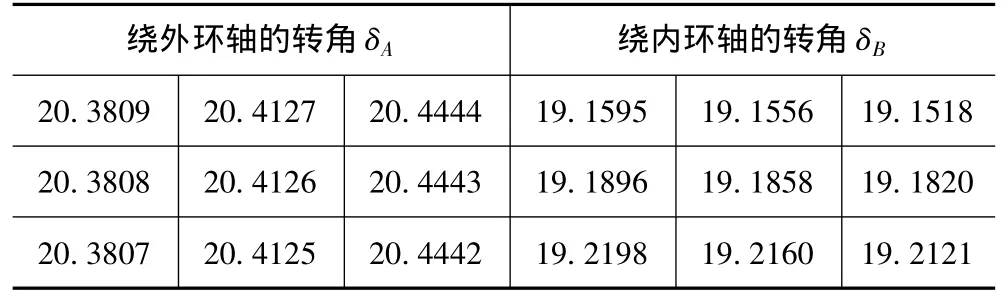
表1 靶標(biāo)成像質(zhì)心在不同坐標(biāo)下解算出的轉(zhuǎn)角值(X和Y方向分別從598~600)Tab.1 Rotation angle values calculated by the target centroid in different coordinate(X,Y directions,respectively,from 598~600)
在圖6~圖7和表1中,轉(zhuǎn)角δA和δB相鄰元素差絕對(duì)值的極大值為0.0363°。這就是說,若圖像處理單元獲取的靶標(biāo)質(zhì)心位置的精度能夠控制在1個(gè)像元大小范圍之內(nèi),則光電成像轉(zhuǎn)角測量精度就能夠控制在0.036°,滿足測量誤差需低于0.05°的要求。當(dāng)然,該分析是在假設(shè)成像設(shè)備安裝準(zhǔn)確的前提下得到的。
6 結(jié)語
本方案采用非接觸式測量方式對(duì)待測物體轉(zhuǎn)動(dòng)姿態(tài)進(jìn)行測量。在測量時(shí),測量元件對(duì)于物體自身的自由運(yùn)動(dòng)沒有任何影響和約束,且測量過程簡單易操作,測量精度高,可靠性好。該測量方案中的測量原理可以廣泛應(yīng)用于國防和工業(yè)轉(zhuǎn)動(dòng)設(shè)備高精度檢測領(lǐng)域,不僅能夠用來驗(yàn)證物體的矢量轉(zhuǎn)動(dòng)的控制準(zhǔn)確性,同時(shí)能夠通過所記錄的高幀頻圖像對(duì)運(yùn)動(dòng)細(xì)節(jié)進(jìn)行進(jìn)一步觀察和分析。
[1]房超.機(jī)器視覺及其在工業(yè)檢測中的應(yīng)用[J].自動(dòng)化博覽,2007,25(4):6-48.FANG Chao.Machine vision and its applications in industrial inspection[J].Automation Expo,2007,25(4):6-48.
[2]席斌,錢峰.機(jī)器視覺測量系統(tǒng)在工業(yè)在線檢測中的應(yīng)用[J].工業(yè)控制計(jì)算機(jī),2005,18(11):75-76.XI Bing,QIAN Feng.Machine vision measuring system online testing in the industrial[J].Industrial control computer,2005,18(11):75-76.
[3]邱茂林,馬頌德,李毅.計(jì)算機(jī)視覺中攝像機(jī)標(biāo)定綜述[J].自動(dòng)化學(xué)報(bào),2000,26(1):43-55.QIU Mao-lin,MA Song-de,LI Yi,Overview of camera calibration in computer vision[J].Journal of Automation,2000,26(1):43-55.
[4]熊有倫.精密測量的數(shù)學(xué)方法[M].北京:中國計(jì)量出版社,1989.XIONG You-lun.Mathematical methods of precision measurement[M],Beijing:Chinese Metrology Publishing,1989.
[5]CHIANG J H,A combination of rough-based feature selection and RBF neuralnetwork forclassification using gene expression data[J].IEEE Transactions on Nanobioscience,2008,7(1):91-99.
[6]PENG D,YI Z.Convergence analysis of a deterministic discrete time system of feng'S MCA learning algorithm[J].IEEE Transactions on Signal Processing,2006,54(9):3626-3632.
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00