三相電源相位檢測及相序自適應在PWM整流器中的應用*
2013-09-27 03:24:18丁云飛楊立波商懷昊李德爽
制造技術與機床 2013年10期
金 蒙 丁云飛 楊立波 商懷昊 李德爽
(大連光洋科技工程有限公司,遼寧大連 116600)
電力半導體開關器件技術的進步,促進了電力電子變流裝置技術的迅速發展,作為電網主要“污染”源的整流器,受到了學術界的關注,開展了大量研究工作。將PWM技術引入整流器的控制之中,使整流器網側電流正弦化,且可運行于單位功率因數。在三相PWM整流器的控制系統中,三相電壓的相位信息是必需的物理量,準確可靠的獲取電壓相位信息是進行三相PWM整流器精確控制的前提。三相PWM整流器的矢量控制系統是以正相序為基礎建立拓撲結構,因此相電壓的相序是必須明確的物理量。另外,檢測相電壓缺相是保證系統安全可靠運行的必要條件[1]。
在工業應用中,相位檢測技術被普遍應用于各種設備中。限于技術難度和成本的考慮,通常采用CD4046一類的鎖相環專用芯片,這類專用芯片屬于模擬鎖相環方案。這類方案將模擬鎖相電路固化在芯片中,應用簡單,但也存在諸多不足。集中表現在電路固化在芯片中不可再修改電路調試參數,相位檢測功能單一,不能滿足復雜的應用需求,模擬電路在電磁環境較差,輸入信號含有大量諧波時易受到干擾而影響控制器正常工作等。
本文給出了一種針對三相PWM整流器控制的鑒相方法。該方法將三相電壓信號接入硬件鑒相電路,這一級鑒相電路將三相正弦信號整形輸出三相方波信號,三相方波信號直接輸入F2812的CAP引腳,結合F2812的捕獲功能用軟件處理方法計算相位角、判斷相序以及判斷缺相。文中提出的方案,原理清晰,可操作性強,且不會增加控制器的復雜度和負擔,特別適合在基于DSP的數字控制系統中實現。通過實驗驗證了該方案的有效性。
1 鑒相電路
鑒相電路(圖1)原理上通過一個遲滯比較環節將三相正弦波形轉化為三相方波信號,經過一級光電隔離電路后再由一級施密特觸發器電路整形,最終的方波信號直接輸入到F2812的捕獲接口[2]。

2 捕獲單元
F2812捕獲單元能夠捕獲外部輸入引腳的邏輯狀態,并利用內部定時器對外部事件或引腳狀態變化進行處理。事件管理器有3個捕獲單元,每個都有自己獨立的輸入信號。捕獲單元以定時器1或2為時間基準進行計數處理。當外部引腳檢測到特定的狀態變化時,所選用的定時器的值將被捕獲單元鎖存到相應的2級FIFO堆棧中。可設定上升沿、下降沿或上升下降沿跳變探測,并且每個捕獲單元都有一個單獨的可屏蔽的中斷標志位[3]。結構示意圖如圖2所示。

捕獲單元被使能后,輸入引腳上的跳變沿將使所選擇的通用定時器的計數值裝入到相應的FIFO堆棧,同時如果有一個或多個有效捕獲值存到FIFO堆棧,將會使相應的中斷標志位置位。如果中斷標志未被屏蔽,將產生一個外設中斷請求。每次捕獲到新的計數值存入FIFO堆棧時,捕獲FIFO狀態寄存器相應的位就進行調整,實時地反映FIFO堆棧的狀態。從捕獲單元輸入引腳發生跳變到所選通用定時器的計數值被鎖存需2個CPU時鐘周期的延時。復位時,所有捕獲單元的寄存器都被清零。
3 相位角計算
根據捕獲單元的原理,設置使用的通用定時器工作模式為連續增計數模式,設置自己的周期寄存器和計數最大值。并設置邊沿檢測為單個上升沿或者下降沿。在邊沿跳變的時候產生捕獲中斷將定時器的計數值存入到FIFO堆棧中,以鎖存的計數值作為相位計算的起始點,實時查詢定時器的計數,同時在每個跳邊沿時更新計數起始點,即可計算每一時刻需要的相位角信息[4]。電網相電壓與對應計算的相位角如圖3。

直觀地講,三相PWM整流器若運行于單位功率因數,即相電流與相電壓相位差為零或者相位差為180°。而相位角直接決定了相電流相位,即可通過直接觀測相電流與相電壓的相位差來判斷相位檢測精度。圖4,圖5分別為三相PWM整流器工作于整流模式相電流和相電壓的波形圖、數據圖。圖6,圖7分別為三相PWM整流器工作于逆變模式相電流和相電壓的波形圖、數據圖。測試儀器為WT3000功率分析儀。




依據測試的數據,三相PWM整流器在整流模式下功率因數可達0.992,在逆變模式下功率因數可達-0.986,都接近于單位功率因數。這樣的精度能夠滿足工業應用的需求。
4 缺相及相序檢測
在PWM整流器控制系統中,其拓撲結構是以三相正相序交流電為控制對象,對于負相序需要做相序自適應處理,而缺相是屬于嚴重的電網故障,不能被正確控制,需要排除缺相的故障。
三相正弦交流電經鑒相電路整形后方波信號(如圖8)的 U、V、W 相依次相差120°,相序組合 UVW、VWU、WUV為正相序;而相序組合UWV、VUW、WVU為負相序。


U、V、W三相方波信號輸入到F2812的捕獲引腳,在設定的跳邊沿產生一個捕獲中斷INT×(U,V,W),因INT×接收到的觸發信號先后時間是未知的,所以按照中斷信號INT×的中斷早晚排序,排序組合可能是下述組合中的一種:INTU—INTV—INTW,INTV—INTW—INTU,INTW—INTU—INTV,INTU—INTW—INTV,INTV—INTU—INTW,INTW—INTV—INTU。設定INTU為U相過零信號跳邊沿中斷,INTV為V相過零信號跳邊沿中斷,INTW為W相過零信號跳邊沿中斷,則對應電源相序可能組合為 UVW、VWU、WUV、UWV、VUW、WVU。用F2812對中斷信號鎖存的通用定時器值進行邏輯判斷容易得到相序關系,再按照相序關系對控制進行自適應。
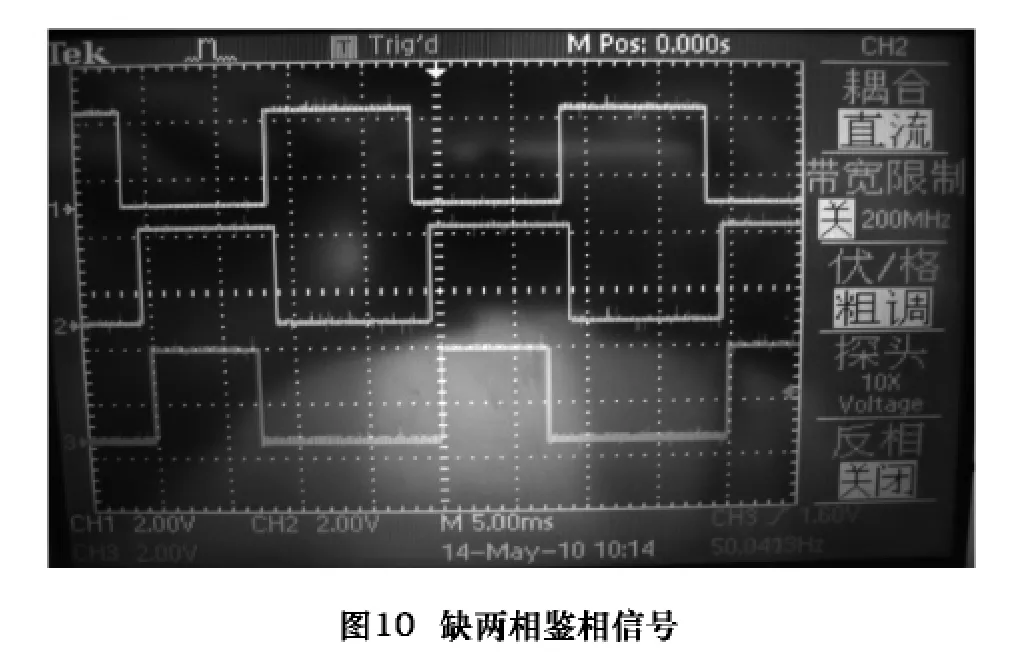
在三相輸入信號缺相時,三相鑒相信號表現出相對穩定的模式,如圖9為缺其中一相的鑒相信號,如圖10為缺其中兩相的鑒相信號,三相全缺少時則沒有變化的信號。從兩種類型的缺相情況分析,在缺相時三相的相位關系已經不存在相互之間相差120°的情況,結合上文中對相序判斷的分析,通過邏輯判斷三相過零信號之間的相位差不在120°左右,則可以判斷為電源缺相。當電源處于缺相狀態,判斷相序是沒有實際意義的。
5 結語
本文詳述了三相鑒相電路原理,以及應用在三相PWM整流器中用作檢測相位角,判斷相序和檢查缺相。并實驗測試了相位檢測在實際應用的精度。該方法硬件簡單穩定可靠,軟件易于實現,檢測精度高。已經應用在數控機床的智能伺服電源開發中。
[1]張興,張崇巍.PWM整流器及其控制[M].北京:機械工業出版社,2012.
[2]高建榮,吳麗云.基于單片機的三相電源相序控制設計[J].微計算機信息,2004(7).
[3]Incorporated T I.TMS320C28x系列 DSP的 CPU 與外設[M].北京:清華大學出版社,2005.
[4]蘇奎峰,呂強,常天慶,等.TMS320X281x DSP原理及 C程序開發[M].北京:北京航空航天大學出版社,2008.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
