定向Ad Hoc網(wǎng)絡(luò)中鄰居發(fā)現(xiàn)與跟蹤技術(shù)研究
2013-09-17 12:31:00王中武
通信技術(shù) 2013年2期
關(guān)鍵詞:方向
王 瑩, 王中武, 莫 嫻
(①海軍司令部信息化部,北京 100841;②中國電子科技集團(tuán)第30研究所,四川 成都 610041)
0 引言
最近幾年,采用高增益的定向鏈路實(shí)現(xiàn) ad hoc組網(wǎng)引起了強(qiáng)烈的關(guān)注。收、發(fā)兩端都使用定向天線能提供更長的傳輸距離和更高的數(shù)據(jù)率。通過將能量的發(fā)射與探測限定到指定的方向,能夠大大減小無用方向上的信號(hào)干擾,提高抗干擾能力。定向傳輸和接收提供的高增益使得較遠(yuǎn)節(jié)點(diǎn)之間也能夠通信,從而減小了網(wǎng)絡(luò)直徑。此外,由于可以調(diào)度多個(gè)節(jié)點(diǎn)之間的鏈路對同時(shí)進(jìn)行定向的傳輸,故可增加空間上的重用效率[1]。因此,采用定向傳輸?shù)囊苿?dòng)自組織網(wǎng)絡(luò)能夠在網(wǎng)絡(luò)服務(wù)質(zhì)量、吞吐量、抗敵方人為干擾和探測等方面獲得較大的性能提升,其程度取決于天線、收發(fā)器以及所采用MAC算法的能力。
在采用定向天線的無線ad hoc網(wǎng)絡(luò)的MAC控制算法方面,相關(guān)研究工作都假設(shè)在算法的某個(gè)階段采用了全向接收。但是,全向接收使得該協(xié)議面對人為干擾很脆弱,而且全向天線與定向天線的增益不匹配,極大影響了網(wǎng)絡(luò)性能的改善程度;現(xiàn)有的鄰居發(fā)現(xiàn)算法,包括隨機(jī)掃描探測算法、窮舉掃描方法以及令牌遍歷扇區(qū)掃描算法[2-3],發(fā)現(xiàn)鄰居時(shí)間可能很長或不是確定的值。此外,在拓?fù)鋭?dòng)態(tài)變化的移動(dòng)自組織網(wǎng)絡(luò)中,節(jié)點(diǎn)的移動(dòng)和信道質(zhì)量的變化給鏈路跟蹤帶來極大的難題。因此,開發(fā)完全采用定向傳輸/接收的快速鄰居發(fā)現(xiàn)與跟蹤算法是一個(gè)極具挑戰(zhàn)的問題。文中基于已有的技術(shù)基礎(chǔ),描述一種完全基于定向波束傳輸?shù)目焖汆従影l(fā)現(xiàn)算法與持續(xù)跟蹤鏈路方向的控制方法,試圖解決該問題。
文中結(jié)構(gòu)安排如下。首先描述 MAC幀結(jié)構(gòu)設(shè)計(jì)與假設(shè)條件,然后描述一種完全采用定向傳輸/接收的、具有確定發(fā)現(xiàn)時(shí)間的快速鄰居發(fā)現(xiàn)方法,最后描述了移動(dòng)節(jié)點(diǎn)應(yīng)用數(shù)字光纖羅盤、北斗接收機(jī)等輔助導(dǎo)航系統(tǒng)模塊實(shí)現(xiàn)動(dòng)態(tài)跟蹤定向鏈路波束方向的方法。
1 MAC幀結(jié)構(gòu)與假設(shè)
在完全定向傳輸自組織網(wǎng)絡(luò)中,若采用基于時(shí)分多址訪問(TDMA)的MAC機(jī)制,則網(wǎng)絡(luò)節(jié)點(diǎn)能夠結(jié)合TDMA每幀的時(shí)隙和鏈路的傳輸/接收方向,以協(xié)作的方式實(shí)現(xiàn)鄰居鏈路上帶寬資源分配和調(diào)度。
將時(shí)間分割為連續(xù)的幀,且將每個(gè)幀分割為 3個(gè)子幀[4]。如圖 1所示,第一個(gè)探測子幀專門用于鄰居探測,即發(fā)現(xiàn)新的鄰居節(jié)點(diǎn)、節(jié)點(diǎn)離開等。第二個(gè)預(yù)約子幀用于兩個(gè)節(jié)點(diǎn)重新確認(rèn)它們在鄰居發(fā)現(xiàn)過程中探測到的連接,并且進(jìn)行數(shù)據(jù)通信預(yù)約。第三個(gè)數(shù)據(jù)傳輸子幀用于實(shí)際的數(shù)據(jù)傳輸。每個(gè)子幀分割為多個(gè)時(shí)隙。
在鄰居探測/預(yù)約期內(nèi)的每個(gè)子幀由多個(gè)時(shí)隙構(gòu)成。為了進(jìn)行功率量級協(xié)商和預(yù)約確認(rèn),需要進(jìn)行一次 3-步/2步握手過程。鄰居探測(發(fā)現(xiàn))所使用的 3-步消息與預(yù)約所使用的2-步消息的內(nèi)容各不相同。為了易于實(shí)現(xiàn),這兩種情況使用相同的消息格式(鄰居發(fā)現(xiàn)和時(shí)隙預(yù)約)。后者的消息長度可能大于前者的消息長度。每個(gè)時(shí)隙能夠容納下鄰居發(fā)現(xiàn)和預(yù)約所使用的3-步握手消息。假設(shè)第一個(gè)子幀包含n(n=3)個(gè)掃描時(shí)隙,第二個(gè)子幀包含r(r=2)個(gè)預(yù)約時(shí)隙。第三個(gè)子幀具有M個(gè)數(shù)據(jù)傳輸時(shí)隙(見圖1)。
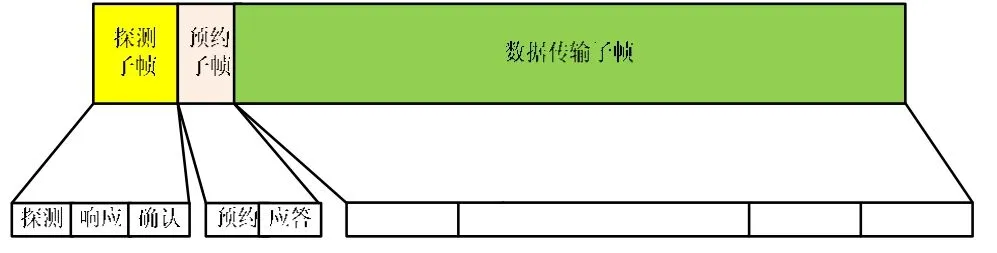
圖1 TDMA幀結(jié)構(gòu)
假設(shè)每個(gè)節(jié)點(diǎn)裝備了一套收發(fā)器與一套波束指向可控(由選取的陣元方向確定)的天線。所有的節(jié)點(diǎn)都是時(shí)鐘同步的(通過北斗或其它方法)。每個(gè)節(jié)點(diǎn)都具有以下能力:
通信為半雙工,但每個(gè)節(jié)點(diǎn)能夠在傳輸與接收模式之間快速地切換。
每個(gè)節(jié)點(diǎn)能夠形成任意ω<π弧度寬度的傳輸或接收單波束。因而,每個(gè)節(jié)點(diǎn)具有定向傳輸與接收的能力。
每個(gè)節(jié)點(diǎn)的定向天單元線采取相同的陣元編號(hào)順序,各節(jié)點(diǎn)陣元天線預(yù)先都經(jīng)過精確的初始安裝方向校對,使各節(jié)點(diǎn)指向正東的陣元編號(hào)都相同。
所有節(jié)點(diǎn)的當(dāng)前時(shí)刻都是 TDMA幀同步的(通過北斗或其它自組織TDMA同步方法[5])。
每個(gè)節(jié)點(diǎn)都安裝有北斗接收機(jī)、測速儀、數(shù)字方向儀、數(shù)字光纖陀螺模塊,能夠根據(jù)采集的實(shí)時(shí)運(yùn)動(dòng)參數(shù)通過運(yùn)算確定自己的地理位置、運(yùn)動(dòng)姿態(tài)(俯仰角、橫滾角)以及朝向。
2 鄰居發(fā)現(xiàn)
鄰居發(fā)現(xiàn)過程在圖 1所示的第一個(gè)子幀內(nèi)進(jìn)行[3]。為了使每個(gè)節(jié)點(diǎn)都快速發(fā)現(xiàn)潛在定向鄰居,采用一種確定性的探測掃描鄰居發(fā)現(xiàn)算法。該算法的前提,是每個(gè)節(jié)點(diǎn)基于數(shù)字指北儀、數(shù)字陀螺,應(yīng)用導(dǎo)航計(jì)算軟件實(shí)時(shí)確定自己的俯仰、橫滾姿態(tài)與方向,在任何時(shí)刻都知道自己的哪一個(gè)天線陣元指向正東、哪一個(gè)天線陣元指向正南、哪一個(gè)天線陣元指向正西、哪一個(gè)天線陣元指向正北。
在進(jìn)行鄰居發(fā)現(xiàn)探測掃描時(shí),所有處于探測掃描模式的節(jié)點(diǎn),無論其姿態(tài)和朝向如何,都以平行的波束軸向向相同的方向發(fā)射;而所有處于偵聽模式的節(jié)點(diǎn),無論其姿態(tài)和朝向如何,都以平行的波束軸向在相反的方向偵聽。
2.1 掃描尋找鄰居
為便于敘述,假設(shè)一對具有定向天線的節(jié)點(diǎn),只要連接它們的直線在一個(gè)節(jié)點(diǎn)的當(dāng)前傳輸波束內(nèi)并且在另一個(gè)節(jié)點(diǎn)的當(dāng)前接收波束內(nèi),就能夠直接進(jìn)行通信。因而,這兩個(gè)節(jié)點(diǎn)必須同時(shí)將它們的波束相互指向?qū)Ψ剑⑶冶仨毺幱趥鬏斉c接收互補(bǔ)的模式(即一個(gè)在發(fā)送時(shí),另一個(gè)必須在接收)。在一個(gè)戰(zhàn)術(shù)網(wǎng)絡(luò)中,其通信可能發(fā)生在3維空間中。不僅在地面與空中節(jié)點(diǎn)之間將會(huì)進(jìn)行通信,而且位于不同海拔高度的地面節(jié)點(diǎn)之間以及在不同高度飛行的空中節(jié)點(diǎn)之間也會(huì)進(jìn)行通信。為了便于形式描述這種情況,設(shè)(θ’,φ’)和(θ’,φ’)分別為兩個(gè)節(jié)點(diǎn)傳輸與接收方向。對于窄波束天線,這兩個(gè)節(jié)點(diǎn)之間的通信需要將這兩個(gè)波束指向相反的方向,并且處于傳輸與接收互補(bǔ)的模式,即:

鄰居發(fā)現(xiàn)的關(guān)鍵思想,是執(zhí)行符合約束條件(1)的搜索過程。一次掃描為達(dá)到整個(gè)搜索空間的一次最小覆蓋的一個(gè)序列(天線指向的若干方向和若干模式),由多個(gè)尖帽狀空間相交形成整個(gè)半球形的搜索空間,每個(gè)波束以其指向方向?yàn)橹行牡膶挾葹棣亍T诿看螔呙柚校鞴?jié)點(diǎn)遵循預(yù)定的順序,但傳輸與接收極性相反。當(dāng)進(jìn)行掃描時(shí),節(jié)點(diǎn)在每個(gè)指定的方向上都傳輸一個(gè)通告。當(dāng)進(jìn)行偵聽時(shí),節(jié)點(diǎn)等待鄰近節(jié)點(diǎn)的通告到來。如果一個(gè)偵聽節(jié)點(diǎn)收到一個(gè)通告,則定向地響應(yīng)它自己的通告,并且期待再接收一個(gè)確認(rèn),這些步驟都是在一個(gè)很短的時(shí)間間隔內(nèi)進(jìn)行。這種3-步握手的每個(gè)部分,都可以交換傳輸功率量級信息和提取方向信息。
2.2 模式選擇
一個(gè)節(jié)點(diǎn)通過對方向序列的單次掃描,有可能探測到它的所有潛在鄰居,但通常需要經(jīng)過多次掃描才能發(fā)現(xiàn)它們[1]。網(wǎng)絡(luò)中所有節(jié)點(diǎn)要發(fā)現(xiàn)它們的所有潛在鄰居所需要的掃描次數(shù)下限和上限,取決于形成的網(wǎng)絡(luò)拓?fù)洹⒐?jié)點(diǎn)每次掃描中用來選擇其掃描或偵聽模式的算法。文中介紹一種確定性的模式選擇算法。每個(gè)節(jié)點(diǎn)的初始化參數(shù)為 N 和 j,這里 j∈{0,1,…,N-1}(為其獨(dú)一無二的標(biāo)識(shí)),且N為網(wǎng)絡(luò)中的最大節(jié)點(diǎn)數(shù)。每個(gè)節(jié)點(diǎn)的ID(即j)以二進(jìn)制形式編碼。如果其位數(shù)小于,則在其左邊添加 0直到位為止。例如,如果N=16并且j=3,則其二進(jìn)制形式為0011。對于一個(gè)掃描周期內(nèi)的第次掃描,如果第位為0則選擇偵聽模式,如果為1則選擇掃描(即主動(dòng)探測)模式。因此,在第一次掃描期間,一個(gè)節(jié)點(diǎn)有機(jī)會(huì)探測到它在網(wǎng)絡(luò)內(nèi)的一半鄰居(若它們在其可達(dá)范圍內(nèi))。很容易證明,任何兩個(gè)節(jié)點(diǎn)的二進(jìn)制編碼內(nèi)都至少含有一個(gè)不同的數(shù)字bit(位),這又意味著這兩個(gè)節(jié)點(diǎn)只要在相互的可達(dá)范圍內(nèi),最多經(jīng)過次掃描就能互相探測到對方。
2.3 3步握手機(jī)制
本節(jié)敘述一種 3-步握手的算法,包括鄰居發(fā)現(xiàn)過程中每個(gè)節(jié)點(diǎn)采取的行動(dòng)以及兩個(gè)節(jié)點(diǎn)(每個(gè)指向位置方向上的節(jié)點(diǎn)1和節(jié)點(diǎn)2)之間的消息交換。其消息內(nèi)容與具體的握手算法相關(guān)。
握手步驟 1:為使發(fā)現(xiàn)其傳輸覆蓋范圍內(nèi)任何潛在鄰居的機(jī)會(huì)最大化,節(jié)點(diǎn)1以收發(fā)器的最大傳輸功率量級傳輸鄰居探測消息,向潛在的鄰居們通告它自己的存在。
握手步驟 2:節(jié)點(diǎn) 2偵聽一次傳輸。如果什么也沒有接收到,則放棄這次握手。否則,如果節(jié)點(diǎn)2成功地接收到節(jié)點(diǎn) 1的鄰居探測消息,則知道了節(jié)點(diǎn)1的存在,并且它可以向節(jié)點(diǎn)1傳輸一個(gè)應(yīng)答消息通告它自己的存在。
握手步驟3:節(jié)點(diǎn)1偵聽一個(gè)返回的應(yīng)答消息。如果沒有收到,節(jié)點(diǎn)1放棄本次握手。否則,若節(jié)點(diǎn)1成功接收到節(jié)點(diǎn)2的應(yīng)答消息,它則知道節(jié)點(diǎn)2存在,節(jié)點(diǎn)1則繼續(xù)進(jìn)行握手操作,并向節(jié)點(diǎn)2響應(yīng)。
節(jié)點(diǎn)2偵聽節(jié)點(diǎn)1的響應(yīng)。如果沒有接收到,節(jié)點(diǎn)2則認(rèn)為節(jié)點(diǎn)1不同意建立一個(gè)連接。否則,如果節(jié)點(diǎn)2成功接收到節(jié)點(diǎn)1的響應(yīng),它則知道節(jié)點(diǎn)1認(rèn)可建立鄰居關(guān)系。
3 執(zhí)行時(shí)隙預(yù)約
在鄰居探測階段中,兩個(gè)節(jié)點(diǎn)已探測到相互的存在,它們還需要確認(rèn)該連接并進(jìn)行鏈路帶寬分配預(yù)約。預(yù)約請求與確認(rèn)將在圖1所示的第二個(gè)子幀內(nèi)執(zhí)行,在預(yù)約子時(shí)隙中,節(jié)點(diǎn)1將開始一個(gè)2-步握手的過程。
節(jié)點(diǎn)1將向節(jié)點(diǎn)2發(fā)出一個(gè)預(yù)約請求消息,指出可用于預(yù)約的空閑時(shí)隙與期望的時(shí)隙數(shù)量。
在接收到節(jié)點(diǎn)1的預(yù)約請求消息后,節(jié)點(diǎn)2計(jì)算出兩個(gè)節(jié)點(diǎn)共同的空閑時(shí)隙的一個(gè)集合。如果共同的空閑時(shí)隙的數(shù)量小于所要求的數(shù)量,則不能作出任何預(yù)約,但這兩個(gè)節(jié)點(diǎn)保留它們最后相互聯(lián)系的方向,可以在隨后的那些幀內(nèi)的下一個(gè)約定的子時(shí)隙內(nèi)繼續(xù)進(jìn)行預(yù)約。如果兩個(gè)節(jié)點(diǎn)的可用共同空閑時(shí)隙數(shù)等于(或大于)節(jié)點(diǎn)1需要的時(shí)隙數(shù),節(jié)點(diǎn)2則以預(yù)約的公共空閑時(shí)隙,向節(jié)點(diǎn)1應(yīng)答一個(gè)預(yù)約響應(yīng)消息。如果兩個(gè)節(jié)點(diǎn)的可用共同空閑時(shí)隙數(shù)小于節(jié)點(diǎn) 1需要的時(shí)隙數(shù),則節(jié)點(diǎn)1應(yīng)答一個(gè)預(yù)約不成功消息。
當(dāng)接收到預(yù)約響應(yīng)消息,則鏈路帶寬資源預(yù)約成功,就可以開始在該定向鏈路上傳輸數(shù)據(jù)業(yè)務(wù)了。
4 鄰居發(fā)現(xiàn)探測掃描的參數(shù)選取
設(shè)一幀的長度為80 ms,前5 ms用于鄰居發(fā)現(xiàn)探測掃描和定向鏈路時(shí)隙預(yù)約,后75 ms包含15個(gè)5 ms寬度的數(shù)據(jù)時(shí)隙。采用由37個(gè)喇叭陣元構(gòu)成的半球形定向波束天線,每個(gè)波束的寬度為30o。
在掃描和預(yù)約子幀內(nèi),考慮波束切換時(shí)間、保護(hù)時(shí)間以及消息長度,完成 3-步握手的每個(gè)子時(shí)隙長度設(shè)置為1 ms,完成預(yù)約子時(shí)隙長度設(shè)置為1 ms。那么每幀有3 ms專用于鄰居發(fā)現(xiàn),每幀有另外2 ms專用于預(yù)約。其總開銷大約為6%。對于30o的波束寬度,需要 37個(gè)波束來完成一次完整的半球形掃描。如果N=64,對于采用確定性掃描算法的情形,它將需要(37×6)×0.1=17.76 s的時(shí)間來完成一次完整的掃描(探測完半球型空間內(nèi)的所有方向)。
5 鏈路方向跟蹤
由于車載或無人機(jī)(UAV)等移動(dòng)載體時(shí)刻處于運(yùn)動(dòng)狀態(tài),節(jié)點(diǎn)的橫滾、俯仰和方位角的變化會(huì)造成已建立的定向鏈路的方向指向產(chǎn)生偏離[6],需要基于周期的測量數(shù)據(jù)和運(yùn)算、在每個(gè)TDMA幀內(nèi)實(shí)時(shí)確定定向鏈路傳輸與接收應(yīng)該采用的最合適的天線陣元。
每個(gè)節(jié)點(diǎn)根據(jù)周期地(如1 s)從數(shù)字指北儀、數(shù)字光纖陀螺儀以及北斗讀取的位置、方向、速度、偏轉(zhuǎn)數(shù)據(jù),利用北斗接收機(jī)測出載體所在地理經(jīng)度和緯度,利用載體上的慣性導(dǎo)航系統(tǒng)測出載體的姿態(tài)參數(shù)(包括載體相對正北方向的航向角、載體相對水平面的橫滾角和俯仰角),根據(jù)定向鏈路鄰居在前一個(gè)TDMA幀內(nèi)報(bào)告的北斗位置經(jīng)度和緯度,通過計(jì)算確定最合適天線陣元,然后在鄰居表中記錄該鏈路的陣元方向矢量,驅(qū)動(dòng)天線實(shí)現(xiàn)對鄰居的跟蹤傳輸與接收。
6 結(jié)語
文中針對采用定向波束天線的無線 ad hoc網(wǎng)絡(luò),結(jié)合TDMA幀結(jié)構(gòu)的時(shí)隙設(shè)計(jì),介紹了一種完全采用定向傳輸/接收的快速鄰居發(fā)現(xiàn)與定向鏈路方向跟蹤算法。在給出的例子中,有大約6%的開銷用于鄰居發(fā)現(xiàn)和預(yù)約,用于預(yù)約和發(fā)現(xiàn)新節(jié)點(diǎn)所花費(fèi)的時(shí)間較為合理,所描述的方法在因抗干擾需求下全向天線不能使用或不符合要求時(shí)是很有用的。最后,需要特別指出,若在定向自組織網(wǎng)絡(luò)中融合頻譜動(dòng)態(tài)認(rèn)知技術(shù)與業(yè)務(wù)流優(yōu)化控制技術(shù)[7-8],則可以大大提高定向空分網(wǎng)絡(luò)的抗干擾能力并進(jìn)一步提高帶寬資源的利用率。
[1] GELAL E,JAKLLARI G,KRISHNAMURTHY S V, et al, An Integrated Scheme for Fully-Directional Neighbor Discovery and Topology Management in Mobile Ad hoc Networks[C]. Canada: IEEE Mobile Ad Hoc and Sensor Systems, 2006:139-149.
[2] KHATIBI S,DEHGHAN M,POORMINA M.Quoram-based Pure directional Neighbor discovery in Self-organized ad hoc Networks[C]. Tehran: IEEE Telecommunications,2010:476-481.
[3] MURAWSKI R,FELEMBAN E,EKICI E, et al.Neighbor Discovery in Wireless Networks with Sectored Antennas[J].IEEE Ad Hoc Networks, 2012,1(10):1-18.
[4] ZHANG Zhensheng.Pure Directional Transmission and Reception Algorithms in Wireless Ad Hoc Networks with Directional Antennas[C]. USA:IEEE Communications,2005:3386-3390.
[5] 劉慶剛,李大雙,朱家成.多跳TDMA組網(wǎng)同步的分布式控制方法[J].通信技術(shù),2012,45(05):26-28.
[6] ZHANG Zhensheng, RYU B,NALLAMOTHU G, et al.Performance of All-Directional Transmission and Reception Algorithmsin Wireless Ad Hoc Networks with Directional Antennas[C]. USA: IEEE Military Communications, 2005:225-230..
[7] 梁燕芬,殷瑞祥.認(rèn)知無線電技術(shù)[J].信息安全與通信保密,2007 (03):121-124.
[8] 楊凌,張曉帆,諸愷,等.多跳對基于802.11的Ad Hoc網(wǎng)絡(luò) TCP流公平性的影響[J].通信技術(shù),2008,41(10):100-102.
猜你喜歡
計(jì)算機(jī)應(yīng)用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創(chuàng)作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
數(shù)學(xué)小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
數(shù)學(xué)小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
