飛機外翼段大尺度剪切式變后掠設計與分析
2013-08-21 11:21:24尹維龍冷勁松
空氣動力學學報 2013年1期
陳 錢,白 鵬,尹維龍,冷勁松,李 鋒
(1.中國航天空氣動力技術研究院,北京 100074;2.哈爾濱工業大學 航天學院,黑龍江 哈爾濱 150080)
0 引 言
隨著空天領域對多功能高效能飛行器需求的增強[1]和仿生飛行與 智 能 材 料 結 構 研 究 的 進 展[2-5],現代變形飛機的研究迅速成為空天技術創新領域的熱點。相比于固定外形飛機,現代變形飛機能如鳥類等飛行生物一樣隨環境與任務變化而靈活改變自身形狀與尺寸,獲得實時最優性能[6-7]。相比于傳統變形飛機,現代變形飛機能充分應用流動控制與智能輕質可變材料結構來實現多時空尺度變形,獲得更優綜合性能。這些特點使得未來飛機發展中現代變形飛機有著廣闊前景。
正由于上述原因,現代變形飛機的研究引起Cornell和Purdue等二十所以上研究型大學的學術小組的探索興趣,受到NASA和DARPA等主要政府專門機構的投資重視,促成Lockheed Martin和NextGen Aeronautics等先進空天技術公司的持續參與。研究者通過合作開展大型研究項目“Mission Adaptive Wing[8]”,“Active Flexible Wing/Active Aeroelastic Wing[9-10]”,“Smart Wing[11-13]”,“Morphing[14-16]”,“Morphing Aircraft Structures[17-20]”,在小尺度局部變形、中尺度分布變形、大尺度全局變形研究方面均獲得突破,例如,融合新材料的機翼前緣與后緣靈活變彎度技術已完成理論計算、風洞實驗、飛行驗證研究。
盡管進展顯著,現代變形飛機的研究仍然面臨諸多挑戰。首先,現代變形飛機作為革命性的[19]多功能飛行器,缺乏先前借鑒,其“設計”幾乎屬于全新課題,多使命任務的規劃與建模、多變形方式的評估與協同,都亟待大量研究;其次,現代變形飛機作為全周期的高效能飛行器,重量問題十分關鍵[1],其“實現”在較大程度上依賴于流動控制與智能輕質可變材料結構的進展,虛擬形狀變化與實際形狀變化的結合、智能材料結構與機械驅動機構的集成,都存在大量難點。
本文將前期研究[21]中所獲得的一種相對較優的大尺度全局變形方式——剪切變后掠(相對于旋轉變后掠,剪切變后掠的氣動特性較優)用于鴨式布局飛機主翼外段變后掠設計,并研制基于可控變形結構與連續變形規律的風洞實驗模型,改進風洞實驗的數據采集與處理方法,開展飛機外翼段剪切式變后掠氣動實驗;由于氣動力可能對實驗模型結構與控制特性產生影響,本文對此開展分析;由于變形飛機研究屬于新領域,加上固定外形飛機氣動分析基本方法已經成熟,已往文獻普遍采用傳統的氣動分析基本方法,本文引入生物飛行研究[22]中已采用的氣動分析方法,分析飛機在變形前后以及變形過程中的氣動特性。
1 飛機外翼段大尺度剪切式變后掠設計
1.1 基于流場數值模擬的變后掠方式設計
飛機變后掠方式具有多樣性。傳統變后掠飛機曾采用一種“旋轉式變后掠”,即在機翼翼根處設置轉軸,使機翼繞此轉軸旋轉,實現后掠角的變化。這種方式在變后掠過程中機翼翼型實時變化。一般而言,經過精心設計的翼型變化為其它較為任意的翼型時,氣動特性改善的可能性甚微。因而,“旋轉式變后掠”可能對氣動特性產生不利影響。若將機翼各展向位置的翼剖面進行線性規律的流向平移,越靠近翼尖平移量越大,則亦可實現后掠角的變化,且變后掠過程中機翼翼型保持不變。這種變后掠方式因類似于材料力學中的剪切變形,故稱為“剪切式變后掠”。
前期研究[21]中數值模擬了旋轉式變后掠翼身組合體與剪切式變后掠翼身組合體繞流流場,并比較了二者的氣動特性。圖1給出了在亞聲速范圍內某一相同攻角下兩種變后掠方式的翼身組合體的升阻比,可見剪切式變后掠方式呈現出了相對優勢。
因此,本文將“剪切式變后掠”這種方式用于飛機外翼段(如圖2藍色部分所示)的變后掠設計。后掠角變化規律包括兩種:一是三角函數規律:

圖1 旋轉式變后掠與剪切式變后掠的氣動特性Fig.1 Aerodynamic characteristics of rotating variable-sweep and shearing variable-sweep

圖2 外翼段大尺度剪切式變后掠飛機Fig.2 Variable-sweep morphing aircraft with outboard wing section large-scale shearing

式中,λ為t時刻后掠角,λ1為最小后掠角,λ2為最大后掠角,T為運動周期。二是周期線性函數規律:

式中,n為運動周期數,其它符號意義同上。
1.2 基于可控變形結構的變后掠模型設計
對于上述變后掠飛機,其模型機身長1.101m,最大展長1.910m。外翼段包括三部分結構(如圖3所示):能繞固定點轉動的前緣、能進行“可控剪切”的平行四邊形中間結構、能繞固定點轉動的后緣,其中,前緣與后緣均具有剛性型面,而中間結構則由翼肋、桁條、柔性蒙皮構成(圖3顯示了翼肋和桁條,圖4顯示了柔性蒙皮)。為了使變形過程中飛機始終保持較規范的氣動外形,前緣和后緣與主翼內段交界處均設計了小型剛性件。

圖3 主翼外段結構Fig.3 Structure of wing outboard section

圖4 風洞中的實驗模型Fig.4 Experiment model in wind tunnel
模型主翼外段由置于主翼內段的電動推桿驅動,如圖3藍色部分所示。主翼外段的每一后掠角對應著電動推桿的某一伸長量,電動推桿的每一伸長量對應著電動推桿內電阻元件的某一電阻值,因而,當控制系統測得電動推桿內電阻元件的電阻值時,即可計算出主翼外段后掠角,從而將這一后掠角值用于變后掠過程的閉環控制。閉環控制主要由控制器來完成。控制器能與計算機軟件進行通信以獲取初始指令,能控制電動推桿的轉/停,能從電動推桿獲得電阻元件的電阻值并計算出主翼外段后掠角值用于閉環控制。所有控制信號線均采用屏蔽線,并與電源線一起從模型尾部引出。
初始設計中,后掠角最小與最大值分別為23°和50.6°,然而實際結構中,由于諸多因素所限,如驅動器所在空間較小、電動推桿伸長量有限等,因而定態實驗中最小與最大后掠角分別為33°和49°,三角函數形式變后掠實驗中最小與最大后掠角分別為34.7°和47°,周期線性函數形式變后掠實驗中最小與最大后掠角分別為32°和48.5°。
1.3 基于風洞動態測試的變后掠實驗設計
本文在低速風洞進行變后掠飛機的實驗測試。該風洞為單回流閉口低速風洞,實驗段長14m,橫截面為3m×3m的四角圓化正方形,圓角半徑0.5m,有效橫截面積8.7854m2。空風洞最高風速100m/s,風洞湍流度低于0.13%,風洞內壁上、下各有0.2°擴張角,以消除沿壁面的邊界層增長的影響,并基本消除實驗段軸向靜壓力梯度。本文實驗風速25m/s。實驗中氣動力與力矩測量采用N6YT19#內式六分量應變天平,表1給出了其設計載荷和靜校精度。
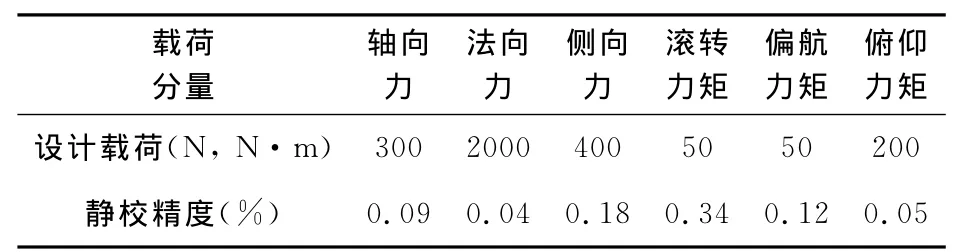
表1 天平設計載荷和靜校精度Table 1 Design loading and calibration accuracy of balance
實驗分為結構與控制特性測試和氣動特性測試兩大部分。前者可演示驗證在風載條件下的剪切式變后掠飛機,分析其蒙皮適宜程度、結構振動程度、驅動平穩程度、控制精確程度;后者可獲取變后掠飛機的準定常與非定常氣動特性,分析變形效益和氣動機理。
變形飛機氣動特性測試相比于固定外形飛機氣動特性測試,具有諸多差異。研究過程中,發現變形飛機氣動特性測試呈現五個新特點:一是應測的物理量增多;二是應測的物理量隨時間而變;三是必須同時采集飛機外形隨時間而變的數據和飛機受力隨時間而變的數據;四是必須考慮各種因素帶來的信號噪聲;五是必須考慮變后掠過程中實驗模型自重產生的氣動力與力矩信號并非定值。
針對第一個新特點,采用了兩套系統進行數據采集,其一為氣動數據采集系統,用于采集時間和六分量氣動力與力矩,其二為變形數據采集系統,用于采集后掠角。
針對第二個新特點,采用了持續的信號采集,保證變形前、變形中、變形后均有足夠數據用于分析。
針對第三個新特點,特別考慮了氣動數據采集系統與變形數據采集系統之間的時間關聯,在兩個系統之間利用采樣觸發器實現通信,保證信號采集已進行5s之后開始改變后掠角,以便在數據處理中能將分別來自兩個系統的氣動信號和角度信號精確對應。
針對第四個新特點,在數據處理程序中設計了“信號數值濾波”模塊。“信號數值濾波”利用函數實現低通濾波,低通截止頻率為5Hz,以便盡可能消除周圍環境的噪聲信號、結構振動的高頻信號、涉電硬件的電磁信號等因素的影響。圖5顯示了濾波前后的信號,可見濾波的作用。

圖5 濾波前后的非定常升力系數Fig.5 Unsteady lift coefficient before and after filtering
針對第五個新特點,在數據處理程序中設計了“重值精確消減”模塊。“重值精確消減”利用系統中采樣觸發器“使變形比采集延遲5s”這一特點,實現變形段對應相減。
另外,數據處理過程中還研究了先濾波后消減與先消減后濾波的區別,結果表明二者差異甚微。
2 飛機外翼段大尺度剪切式變后掠分析
2.1 變后掠結構與控制分析
由于剪切式變后掠飛機采用了以往固定外形飛機所未采用的柔性蒙皮,故需研究此蒙皮的適宜程度。分析柔性蒙皮的受力,主要有三類:(1)在氣動載荷作用下,蒙皮主要承受正壓力;(2)在變形機構作用下,蒙皮主要承受剪切力;(3)另外,如傳統蒙皮以一樣,柔性蒙皮還承受翼肋等傳遞的拉力。實驗測試中發現:第一類力使蒙皮產生垂直于表面的位移,由此引起的氣動型面變化是應注意的方面,這種變化一般會降低機翼的氣動性能,需要設計若干相應的固定型面機翼來對此種降低程度進行定量對比研究,亦需要設計特定的方案來避免這種降低以便在真實飛機上應用柔性蒙皮;然而,盡管柔性蒙皮的應用可能導致氣動性能降低,但作為飛機大尺度全局變形研究平臺的剪切式變后掠飛機風洞實驗模型,仍然能用于研究諸多氣動性能問題,如變后掠過程中的非定常氣動特性等,這在下文將會得到討論。第二類和第三類力使蒙皮產生表面內的位移,由于柔性蒙皮彈性模量較小,可發生大的彈性變形,因而,即使本文研究過程中多次進行變后掠實驗,第二類和第三類力也未對柔性蒙皮產生負面影響。
由于剪切式變后掠飛機存在較多可活動連接件,故需研究整個結構系統的剛度,以及部件間的干擾和約束。實驗測試中發現,在氣流擾動作用下,結構系統的整體和部件存在振動。圖5中可見升力系數原始信號,其中可能摻雜各種振動噪聲信號,通過濾波,可以減弱這些振動噪聲信號對氣動特性測量的影響。另外,結構系統的可動部分在氣動力、重力、驅動器作用力(對于結構系統的可動部分,此作用力為外力)作用下,仍然能實現可控運動而不會出現部件間的干擾,而且,結構系統的可動部分在驅動器約束下,能使后掠角不超過預先設定的范圍。
由于剪切式變后掠飛機采用電動推桿實現后掠角的往復周期運動,故需研究驅動過程的平穩程度。圖6給出了實驗中測得的后掠角隨時間變化9個周期的典型曲線。可見,在閉環控制系統的指令下,電動推桿能實現預期的變后掠效果。

圖6 閉環控制作用下的時變后掠角Fig.6 Time-varying sweep-angle under closed-loop control
另外,也能實現(1)、(2)式所表征的運動規律。
由于剪切式變后掠飛機需要實現后掠角的精確控制,故需研究名義后掠角與實際后掠角的關系。通過后掠角的標定,可得到名義后掠角與實際后掠角的關系曲線,據此可根據每個名義后掠角得出實際后掠角的值,用于準定常與非定常氣動特性分析。
2.2 變后掠氣動分析的參數
在定量的變后掠氣動分析之前,有必要研究變后掠相對于固定外形的新的氣動參數。
傳統的升力系數和阻力系數與自由來流馬赫數、雷諾數、飛機形狀、飛機相對于自由來流的姿態有關,而與飛機尺寸無關[23],對于固定外形、無偏航無滾轉的飛機,可表達為[23]:

其中,CL,conventional為 傳 統 的 升 力 系 數,CD,conventional為 傳統的阻力系數,M∞為自由來流馬赫數,Re為雷諾數,α為飛機相對于自由來流的攻角。
“傳統的系數”在分析諸如“真實飛機與形狀相同而尺寸不同的風洞實驗縮比模型的氣動特性關系”等問題時,在某種程度上比“原始的力”具有優勢。例如,真實飛機與相應的風洞實驗縮比模型,在自由來流馬赫數、雷諾數、攻角、幾何形狀相同的情況下,盡管幾何尺寸不同,但二者的“傳統的升力系數和阻力系數”仍然相同,可由縮比模型的氣動系數直接得到真實飛機的氣動系數。
然而,當分析變形飛機的氣動特性時,“傳統的系數”相對于“原始的力”的上述優勢不復存在。例如,由變形飛機的一種外形的升力系數和阻力系數并不能得到另一種外形的升力系數和阻力系數的相關情況。
更關鍵的是,分析變形的效益,一個重要方面在于分析飛機的形狀和尺寸變化對氣動特性的影響,傳統的系數由于只能反映形狀變化的影響而不能反映尺寸變化的影響,因而不再適用。
于是,引入兩個新的物理量,“比速升力”和“比速阻力”[22]:

其中,SSL為比速升力,SSD為比速阻力,S為機翼投影面積,其它符號意義同上。由于比速升力和比速阻力分別在傳統的升力系數和阻力系數基礎上考慮了尺寸變化的影響,因而適用于分析變形的效益。
基于比速升力和比速阻力,再定義兩個無量綱量,“變形飛機升力系數”和“變形飛機阻力系數”:


其中,CL,morphing為變形飛機升力系數,CD,morphing為變形飛機阻力系數,S0為一恒定的基準面積,其它符號意義同上。定義變形飛機升力系數和變形飛機阻力系數的意義在于,二者既能反映飛機的形狀變化對氣動特性的影響,又能反映飛機的尺寸變化對氣動特性的影響,因而適用于分析變形的效益;同時,只要選擇合適的基準面積S0,即可使二者在數值上接近傳統的升力系數和阻力系數,有助于使變形飛機的研究不脫離傳統的固定外形飛機研究。
2.3 變后掠氣動分析
阻力極曲線在氣動特性分析中具有極其重要的作用[23],本節首先據此研究變后掠飛機的準定常氣動特性,并應用第2.2節所推導的參數進行變形效益分析。
圖7給出了飛機后掠角處于四種不同值時的阻力極曲線,其中(a)圖的升力和阻力系數按傳統定義,(b)圖的升力和阻力系數按式(7)、(8)定義。可見,二者具有差異。上文已通過分析指出,前者不適用于分析變形的效益,而后者適用。

圖7 變后掠飛機的準定常氣動特性Fig.7 Quasi-steady aerodynamic characteristics of variable-sweep morphing aircraft
然而,如何從圖7(b)直觀地感知變形效益,是亟待回答的問題。文獻[22]在分析鳥類變形飛行的氣動特性時,采用了“分析阻力極曲線左邊界”的方法,即考察“阻力極曲線族的左邊界”與“任一單獨阻力極曲線的左邊界”后發現,前者在后者左側,這表明鳥類飛行過程中根據所需升力實時改變自身外形可以達到實時減阻的效果。對于本文的變后掠飛機,采用同樣的分析方法可知,若飛機飛行過程中根據所需升力實時改變后掠角,則可以達到實時減阻的效果,亦即變形會帶來氣動效率方面的效益。
必須指出,圖7(b)中顯示的變形的效益,僅為恒定速度下的結果。若飛機飛行過程中,將變后掠與變速結合起來,則可獲得比圖7(b)所示更大的效益,后續研究將對此予以定量計算。
實驗中,當飛機連續改變后掠角,可測得后掠角隨時間而變的數據和氣動特性隨時間而變的數據。通過兩組數據的時間關聯,可得到氣動特性隨后掠角而變的曲線,據此可研究變后掠過程中飛機的非定常氣動特性。

圖8 10°攻角下以三角函數形式變后掠時的氣動特性Fig.8 Aerodynamic characteristics in 10°angle-of-attack with sweep-angle varying in trigonometrical manner
圖8 給出了10°攻角下飛機連續改變后掠角時的升力系數和俯仰力矩系數隨后掠角的變化,并與非連續改變后掠角時的氣動特性進行了比較。可見,非定常結果與準定常結果存在顯著差異。具體表現為:(1)后掠角往復變化的一個周期內,非定常氣動特性曲線在準定常氣動特性曲線周圍形成滯回環;(2)非定常升力系數的滯回環呈順時針方向,俯仰力矩系數的滯回環呈逆時針方向。
之所以出現滯回環,有兩個可能原因:一是“機翼附加速度效應”,即飛機的主翼外段變后掠時,其相對于遠場來流的速度發生變化,這將使非定常氣動特性的數值產生較大變化;二是“流場結構遲滯效應”,即變后掠過程中流場邊界連續變化,而相應的流場結構變化可能慢于流場邊界變化。進一步的實驗與計算有助于深入認識這兩種效應。
之所以升力系數與俯仰力矩系數二者滯回環方向相反,原因在于壓心在力矩參考點之后,俯仰力矩為負值,即俯仰力矩為低頭力矩。
上述非定常氣動特性與準定常氣動特性的顯著差異,正表明了基于本文的飛機大尺度全局變形研究平臺,有諸多新的主題有待研究,而這正是飛機大尺度全局變形實用化之前的關鍵。
3 結 論
飛機外翼段大尺度剪切式變后掠設計與分析,是通過學科交叉進行飛機大尺度全局變形概念研究的一種探索,研究中得到以下結論:
(1)飛機變后掠的具體實現方式對其氣動特性具有顯著影響,對于“旋轉式變后掠”與“剪切式變后掠”,后者的氣動特性具有相對優勢,因而,將“剪切式變后掠”納入變后掠飛機氣動布局設計可形成總體性能方面的潛在效益;
(2)氣動力作用下的變后掠運動對飛機變后掠部件的蒙皮、結構、驅動、控制提出了較大挑戰,本文所設計與測試的研究平臺在低風速領域,滿足研究需求;
(3)飛機通過變形所獲得的氣動效益,應采用新的分析方法;相比于傳統分析方法,本文所推導的新方法,能更詳盡地呈現變形的氣動效益;
(4)連續改變后掠角的過程中,飛機的非定常氣動特性與相應的準定常氣動特性存在顯著差異,其原因可能在于“機翼附加速度效應”和“流場結構遲滯效應”,進一步的實驗與計算有助于深入認識這兩種效應。
[1] SEIGLER T M,NEAL D A,BAE J S,et al.Modeling and flight control of large-scale morphing aircraft[J].Journal of Aircraft,2007,44(4):1077-1087.
[2] HEDENSTR?M A,JOHANSSON L C,WOLF M,et al.Bat flight generates complex aerodynamic tracks[J].Science,2007,316(5826):894-897.
[3] MUIJRES F T,JOHANSSON L C,BARELD R,et al.Leading-edge vortex improves lift in slow-flying bats[J].Science,2008,319(5867):1250-1253.
[4] SONG A,TIAN X D,ISRAELI E,et al.Aeromechanics of membrane wings with implications for animal flight[J].AIAA Journal,2008,46(8):2096-2106.
[5] THILL C,ETCHES J,BOND I,et al.Morphing skins[J].The Aeronautical Journal,2008,112:117-139.
[6] 陳錢,白鵬,尹維龍,等.可連續光滑偏轉后緣的變彎度翼型氣動特性分析[J].空氣動力學學報,2010,28(1):46-53.(CHEN Q,BAI P,YIN W L,et al.Analysis on the aerodynamic characteristics of variable camber airfoils with continuous smooth morphing trailing edge[J].Acta Aerodynamica Sinica,2010,28(1):46-53.(in Chinese).)
[7] 陳錢,尹維龍,白鵬,等.變后掠變展長翼身組合體系統設計與特性分析[J].航空學報,2010,31(3):606-613.(CHEN Q,YIN W L,BAI P,et al.System design and characteristics analysis of a variable-sweep and variable-span wing-body[J].Acta Aeronautica et Astronautica Sinica,2010,31(3):606-613.(in Chinese).)
[8] HALL J M.Executive summary AFTI/F-111mission adaptive wing[R].WRDC-TR-89-3083,1989.
[9] PERRY III B,COLE S R,MILLER G D.Summary of an active flexible wing program[J].Journal of Aircraft,1995,32(1):10-15.
[10]PENDLETON E,FLICK P,PAUL D,VORACEK D,et al.The X-53asummary of the active aeroelastic wing flight research program[R].AIAA-2007-1855,2007.
[11]KUDVA J N,MARTIN C A,SCHERER L B,et al.Overview of the DARPA/AFRL/NASA smart wing program[A].Proceedings of SPIE[C],1999,3674:230-236.
[12]KUDVA J N,SANDERS B,PINKERTON-FLORANCE J,et al.Overview of the DARPA/AFRL/NASA smart wing phase 2program[A].Proceedings of SPIE[C],2001,4332:383-389.
[13]KUDVA J N,SANDERS B,PINKERTON-FLORANCE J,et al.The DARPA/AFRL/NASA smart wing program-final overview[A].Proceedings of SPIE[C],2002,4698:37-43.
[14]WLEZIEN R W,HOMER G C,Mcgowan A R,et al.The aircraft morphing program[R].AIAA-1998-1927,1998.
[15]MCGOWAN A-M R,WASHBURN A E,HORTA L G,et al.Recent results from NASA's morphing project[A].Proceedings of SPIE[C],2002,4698:97-111.
[16]MCGOWAN A-M R,COX D E,LAZOS B S,et al.Biologically-inspired technologies in NASA's morphing project[A].Proceedings of SPIE[C],2003,5051:1-13.
[17]IVANCO T G,SCOTT R C,LOVE M H,et al.Validation of the Lockheed Martin morphing concept with wind tunnel testing[R].AIAA-2007-2235,2007.
[18]BALDELLI D H,LEE D H,PE?A L S,et al.Practical modeling,control and simulation of an aeroelastic morphing UAV[R].AIAA-2007-2236,2007.
[19]BOWMAN J,SANDERS B,CANNON B,et al.Development of next generation morphing aircraft structures[R].AIAA-2007-1730,2007.
[20]GANDHI N,COOPER J,WARD D,et al.A hardware demonstration of an integrated adaptive wing shape and flight control law for morphing aircraft[R].AIAA-2009-5890,2009.
[21]陳錢,白鵬,李鋒.可變形飛行器機翼兩種變后掠方式及其氣動特性機理[J].空氣動力學學報,2011,30(5):658-663.(CHEN Q,BAI P,LI F.Morphing aircraft wing variable-sweep:two practical methods and their aerodynamic characteristics[J].Acta Aerodynamica Sinica,2011,30(5):658-663.)
[22]LENTINK D,MüLLER U K,STAMHUIS E J,et al.How swifts control their glide performance with morphing wings[J].Nature,2007,446(7139):1082-1085.
[23]ANDERSON J D.Aircraft performance and design[M].Boston:The McGraw-Hill Companies,Inc.,1999.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
環球時報(2022-05-30)2022-05-30 15:16:57
中華詩詞(2020年1期)2020-09-21 09:24:52
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年11期)2019-06-24 03:40:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04